一种空间用熔铸炸药逻辑伸缩机构设计
2021-11-03孙云忠谭庆吴臣
孙云忠 谭庆 吴臣
(湖南国防工业职业技术学院 湖南省湘潭市 411207)
熔铸炸药因其装填密度高,内部缺陷少,燃烧时间可控,爆炸稳定而应用于空间卫星的爆炸连接装置上。在轨维护和维修、在轨加注、在轨功能扩展和软件升级等在轨服务任务日益成为我国卫星发展的重要任务[1-11]。空间对接机构用于实现两个航天器之间的捕获和连接,捕获机构是空间对接机构的重要组成部分。黄剑斌[12]提出了一种卫星柔性对接补加一体化机构方案;张晓天[13]提出了一种模块化微小型卫星对接机构方案;高碧祥[14-15]提出了一种对接环式的空间对接机构。本文在前述研究的基础上,提出了一种逻辑型螺旋式卫星捕获伸缩机构。
1 结构原理
逻辑型螺旋式伸缩结构图如图1 所示,其主要由直导引筒、花瓣片、伸缩舌、花瓣座、深沟球轴承、套筒1、套筒2、内杆、一级止动球、弹簧1、二级止动球、弹簧2、内杆制转套、套筒支撑等组成。
直导引筒固定在捕获机构底座(图中未画出)上。
套筒支撑套接在直导引筒内,且与直导引筒为过度配合。
花瓣座外端通过矩形凸起安装在直导引筒内的对称矩形槽内,花瓣座可绕直导引筒纵轴滑动,但不能转动;花瓣座后端与套筒2扣接在一起,轴向无相对运动,但可相互转动。
花瓣片用螺钉固定在套筒支撑左端。3 个花瓣片通过转轴均布的安装在花瓣座上的安装孔内,可沿转轴纵轴旋转,安装在转轴上的扭簧保证花瓣片能始终贴紧伸缩舌。
套筒1 套接安装在套筒支撑内,可绕套筒支撑纵轴进行旋转,但不能沿套筒支撑纵轴移动。
套筒2 套接在套筒1 内,且其上的右旋螺纹与套筒1 上的右旋螺纹进行配合。
内杆与伸缩舌用螺钉固定连接,且套接在套筒2 和套筒制转套内,其上的右旋外螺纹与套筒2 上的右旋内螺纹进行配合。套筒制转套固定在捕获机构底座(图中未画出)上,其上的方形孔与内杆上的方形结构相配合,使得内杆绕其纵轴的旋转自由度被约束,仅能沿其纵轴滑动。
3 对二级止动球和弹簧2 对称套接在套筒1 上的侧孔内,弹簧2 将二级止动球压紧以贴紧套筒2。
3 对一级止动球和弹簧1 对称套接在套筒2 上的侧孔内,弹簧1 将一级止动球压紧以贴紧内杆。
伸缩机构初始状态如图1 所示,一级止动球在弹簧1 的作用下卡入内杆上的球形槽内,二级止动球在弹簧2 的作用下贴紧套筒二级套筒2 的外圆柱面。
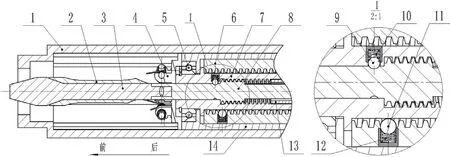
图1:逻辑式螺旋式伸缩机构结构图
工作时,捕获平台姿态发动机带着伸缩机构靠近目标卫星,并将伸缩机构插入目标卫星发动机拉瓦尔喷管内。
当伸缩机完全进入目标卫星拉瓦尔喷管后,传动装置(图中未画出)驱动套筒1 逆时针旋转,驱动内杆、套筒2,以及与二者固定构件向前运动。当套筒2 上的球形槽运动至二级止动球处时,二级止动球在弹簧的作用下卡入球形槽内,此时,伸缩舌和花瓣片已通过目标卫星发动机拉瓦尔喷管喉部。

图5:套筒2 转速-时间、位移-时间曲线

图6:内杆位移-时间与速度-时间曲线
当二级止动球卡入球形槽后,二级止动球产生的切向力将比一级止动球产生的切向力大。套筒1 在传动装置作用下顺时针旋转,套筒1 套筒1 和套筒2 将以相同运动速度,带动内杆和伸缩舌一起向后缩回,如图2 所示,伸缩舌将花瓣片撑开,使其贴紧目标卫星拉瓦尔喷管喉部,与阻尼器一起完成对目标卫星的捕获。

图2:伸缩机构捕获完成示意图
对目标卫星实施释放动作时,将上述动作反向实施即可。
2 多刚体动力学仿真分析
为验证机构的运动可靠性和平顺性,使用刚体动力学仿真软件对机构关键部件进行分析。螺钉、螺栓等固定件使用固定副代替,弹簧采用软件自带的模块进行代替。
通过仿真得到了如图3 所示的机构运动过程,分别是初始;内杆和套筒2 伸出;套筒2 和内杆伸出到位;内杆后收到位,花瓣片撑开到位;内杆前伸复位到位;内杆、套筒2 开始收回;内杆、套筒2 收回到位。

图3:机构运动过程仿真示意图
套筒1、套筒2 和内杆的动力学曲线,分别如图4、5、6 所示。分析套筒1 的转速-时间动力学曲线可知,套筒1 先进行正向回转,0,85s 处开始减速进行反向回转,转速曲线符合电机转速曲线规律。

图4:套筒1 的转速-时间曲线
从0-0.125s,套筒1 在电机的传动下开始正向加速旋转,0.125s左右进入匀速旋转阶段。套筒2 和内杆在套筒1 的带动下一起运动,0.75s 左右套筒2 和内杆一起向前伸出60mm,满足设计的要求,套筒2 旋至限位销位置,轴向位移限制,速度降为0,内杆相对套筒2 反向旋转,做向后运动,花瓣式锁紧片开始张开。0.9s 左右,内杆收回8mm,如图4 所示,内杆和捕获杆到达最后制止点,花瓣式锁紧片张开到位,逻辑丝杠机构此时完成对发动机的捕获。
随后电机反转,套筒2 相对套筒1 静止,内杆正向旋转向前运动,花瓣式锁紧片开始释放,1.125s 左右,内杆伸出8mm,花瓣闭锁片被完全释放,此时内杆旋至限位销位置,轴向位移限制,内杆相对套筒2 静止,套筒2 克服二级止动球摩擦力开始带动内杆反向旋转。套筒2 和内一起反向运动完成复位。通过动力学曲线分析机构零件运动可以看出伸缩机构满足设计要求。
3 结论
本文在前人研究的基础上,提出了一种逻辑型螺旋式的卫星捕获伸缩机构。采用分析法对机构运动可靠性进行了论证,并对机构进行了建模和刚体动力学仿真,结果表明,本文设计的卫星捕获伸缩机构原理上是可行的,且质量仅为3.5kg,具有一定的工程实用价值。
