多功能导盲杖*
2021-11-01汤唯业杜莹旭
于 琳,汤唯业,陈 聪,杜莹旭
(西南科技大学,四川 绵阳 621000)
中国是世界上盲人最多的国家,且盲人的数量以平均每年45 万人的速度在增加,而且许多是因为先天性遗传眼病造成的视力低下,其中包括许多14 岁以下的儿童盲人。而白内障则是许多60 岁以上老年人成为盲人或视力低下的主要原因[1]。盲人群体数量的增加也让盲人的交通出行安全以及盲人走丢事件逐渐成为不可忽视的问题。当今城市建筑以及道路复杂程度提高致使盲人出行的危险性以及走丢事件发生的概率也大大上升。为提高盲人出行的安全性,帮助盲人在出行途中保护自身安全,同时降低盲人走丢事件的发生概率,而设计了此款导盲杖。
1 整体设计
本设计以STM32 最小系统为核心控制单元,还包括超声波模块、MUP6050 摔倒检测模块、树莓派图像处理模块、GPS 模块、短信模块、语音模块、报警模块、电源模块以及按键。
STM32 单片机初始化各个模块,同时设定超声波模块的距离阈值为60 cm。MPU6050 检测系统的加速度,当加速度大于1 g 并且倾斜角度大于正常角度时判断按键是否按下,若没按下,则系统蜂鸣器开始报警并发送短信给监护者;同时超声波模块检测前方是否有障碍物并语音提示;树莓派通过与单片机串口通信初始化后调用摄像头获取道路图像,通过图像处理分析前方道路上是否存在障碍物,在检测到障碍物后蜂鸣器会再次报警;GPS 模块实时发送位置信息到监护人手机端[2],设计总体结构如图1 所示。

图1 设计总体结构图
2 系统的总体结构
2.1 主控STM32 最小系统
主控芯片采用STM32 芯片。该芯片运算能力强大且功能齐全,能够驱动各个传感器、发送控制信号以及接收传感器检测的信息,将接收和发送的信号进行运算处理,重复发送接收过程,进而连接各个部分元器件,将功能综合化。
2.2 摔倒检测分析
人体摔倒是在一瞬间完成的,在这个过程中人的中心高度、行为速度、动作方向等都会发生快速变化,而在人体正常的活动中这些值也会发生改变。为了区别摔倒与正常行为,本设计利用阈值法进行检测,硬件上采用了MPU6050模块。本设计从分析角度和加速度两个量值的变化来进一步判断盲人的摔倒情况。
要对盲人进行摔倒检测,应对人体的行为速度特征进行分析和处理,人摔倒时一般是从站立状态到跌坐或跌倒状态,身体重心直线下坠或者向前、向后倾斜。因此引入人体加速度向量幅值SVM 来表征人体运动的剧烈程度并建立空间人体坐标系来模拟运动情况。
调查可知,在正常直立情况下,人的身体与重心方向的倾角应该小于60°;人平躺着时,倾角接近90°,因此将60°作为判断人体摔倒的阈值。当传感器角度在60°~90°时,可判定该盲人90%是摔倒了[3]。
人体运动的剧烈程度可由计算加速度幅度的特征值SVM 来表示,人体运动越激烈其值将会越大,在动态坐标系下考察SVM。其计算公式如下:
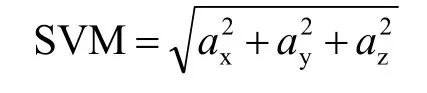
倾角计算原理为:当人身体发生一定倾斜时,在人体空间建立的X、Y、Z轴的方向也会发生对应的不同变化。重力加速度g分解为Y轴上的gY和Z轴上的gZ,g与gY的夹角∠b的余弦值求反余弦即得到∠b的值,即
经过四元运算得到欧拉角,取俯仰角。计算公式如下:

2.3 障碍预警系统
障碍预警主要是采用超声波传感器实时检测与前方障碍物地距离,为了确保距离数值切合实际此处采用均值滤波法。一共进行5 次测量并去掉最大值和最小值,最终取3 个数值的平均值,这样可提高系统的稳定性,当距离小于所设定阈值时,IO 口电平由低变高,蜂鸣器响起提醒盲人前方危险注意安全[4]。
2.4 移动端检测系统
GPS 系统获取盲人的地理位置信息,并通过读取短信的方式将盲人的经纬度位置发送给家属手机,使其手机上可以实时显示盲人位置。移动端地图显示如图2 所示。图2 中五角星位置即表示盲人所在位置,当发生突发情况时,医护人员可快速准确地确定盲人位置。

图2 移动端地图显示
2.5 图像处理部分
受树莓派的资源限制,本设计的图像处理不适合用过于复杂的神经网络算法等识别技术。本设计采用归一化互相关算法(NCC)[5],该算法由使用者步长来确定。算法思想是:当模板和源图像像素相关性比较小时,采用大步长计算;当模板和源图像像素相关性比较大时,采用小步长计算(二者均自行设置比较对象参数)。
该算法计算模板和原始图像之间的关联情况,通过比较二者在不同位置的标准关系来实现此算法。最佳匹配点的数学定义为:假设图像S 的尺寸为M×M,模板T 大小为N×N,其中M>N,M、N的单位为像素。模板T 从(0,0)位置开始,模板T 在图像S 上平移,子图位置S(i,j)为模板覆盖的位置,其中(i,j)为子图左上角坐标。R为归一化相关系数,R在(0,1)间变动,当源图像和某个子图与模板完全一致时便可得到R的最大值1[6],计算公式如下所示:

盲道处于不同的路段,规格可能不尽相同,本设计的适应性需要在这个方面有所提升。盲道最大的特点是其条状的凸起,可以采用边缘提取获得关键参数,从而减少匹配点的计算量,提高匹配速度。在本设计中提前对图像进行了平滑处理,并在边缘提取之前去除一些噪声。因此获得了相对较少的边缘点数,有利于后续处理和识别。
3 实验结果分析
正常情况下,SVM 值基本为16 400,即1 g 左右波动,当人体加速晃动时,其安全加速度应在12 000~22 000 之间变动,当超出其阈值范围并持续3 s 以上时便可进行角度判定,若人体倾角大于60°,则判定盲人90%摔倒了,蜂鸣器报警并将以短信的方式将盲人位置发送到监护人手机上。
为了与日常活动行为进行区别,对该导盲杖做了多次不同的测试,其准确率基本可以达到90%左右,具体数据如表1 所示。
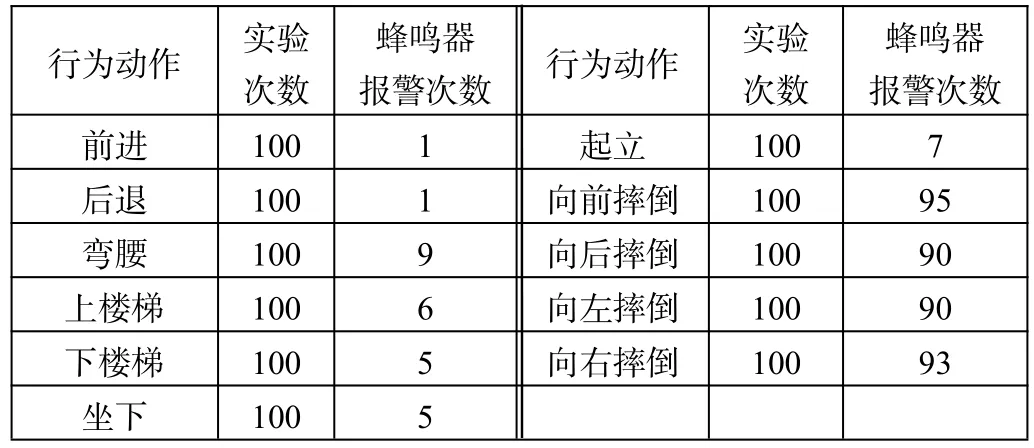
表1 行为测试结果
4 结语
为了在盲人出门摔倒时能及时通知家人并获得救治,研发一种基于STM32 的摔倒障碍预警导盲杖,利用MPU6050检测导盲杖实时角度,结合阈值判断盲人当前状态,结合超声波传感器以及树莓派获取当前道路状况并及时作出预警,并在摔倒等紧急情况下,将含有GPS 定位信息的短信通过GSM 模块发送到监护人手机端。经过多次试验测试,证明该系统能够有效检测摔倒行为是否发生并在突发情况下能够及时报警,效果较好,实用性较强,可以投入市场。
