机载静默射频噪声掩护技术研究
2021-10-31王奥亚周生华彭晓军刘宏伟苏洪涛严俊坤
王奥亚 周生华* 彭晓军 马 晖 刘宏伟 苏洪涛 严俊坤
①(西安电子科技大学雷达信号处理国家重点实验室 西安 710071)
②(中国运载火箭技术研究院 北京 100000)
1 引言
在未来战争中,日趋复杂的电磁环境使得传统的战斗武器的生存受到考验,因此为了提高武器的生存能力、突防能力、对目标实施打击能力,雷达隐身技术则是亟需研究的重要方向之一[1–3],电磁隐身的目的是隐藏战斗机本身的特征信号使得目标雷达散射截面积减小,从而降低雷达对战机的探测能力。雷达隐身技术分为有源隐身技术和无源隐身技术[4,5]。无源隐身通过减小雷达散射截面积[6]来实现隐身效果,无源隐身是一种被动隐身技术,包括赋形隐身技术、涂层隐身技术[7]等。有源隐身技术是指战斗机主动发射干扰信号对敌方雷达发射的电磁波进行干扰和欺骗,以影响雷达的探测能力,使雷达难以对战机进行探测、定位从而实现战斗机的隐身[8]。被动隐身技术是当前隐身的主流技术,多种技术手段已经有一定的成熟度,但被动隐身具有一定的缺陷,例如对于涂层隐身技术,其隐身效果与雷达频段有关,对米波雷达等低频雷达隐身效果较差,并且涂层材料受温度和湿度影响,维护成本高。相对于被动反雷达隐身技术来说,主动反雷达隐身技术具有成本低、易制造、占用空间小等优点,是被动隐身的良好补充。主动隐身技术包括电子欺骗与干扰、有源对消等,这些技术在干扰机不能准确获取敌方雷达发射信号频率等信息时隐身性能会下降[9]。本文研究了一种新的隐身技术,即机载静默噪声射频掩护技术,通过发射能量较小的噪声信号,在保证该信号不被截获的前提下提升敌方雷达噪声基底,降低敌方雷达接收回波的信噪比,达到掩护己方战机目的。
2 信号模型
2.1 敌方雷达对己方目标的检测性能
假设敌方雷达向空间中发射电磁波来探测我方战机目标,为避免被敌方雷达探测到目标,我方考虑用干扰机向敌方雷达发射信号来提升目标所在的距离维上检测单元以及参考单元的背景噪声功率,场景图如图1所示。考虑到雷达系统内部噪声水平不稳定,多数雷达采用恒虚警检测器(Constant False Alarm Rate,CFAR)[10]处理回波数据,因此这里假设敌方雷达采用单元平均恒虚警检测器(Cell Average-Constant False Alarm Rate,CACFAR)来判决目标是否存在,此时目标存在条件(假设H1)下的回波信号模型表示为

图1 己方战机施加噪声干扰场景图

其中,s表示目标回波分量,z0表示己方发射静默噪声分量,n0表示通道噪声分量。假设均匀噪声背景下且两个噪声分量均服从零均值循环复高斯分布,噪声电平分别是,且噪声之间相互统计独立。目标不存在条件(假设H0)下检测单元的信号模型表示为

假设接收到Nb(这里Nb均考虑为偶数)个参考单元的回波信号,它们具有如式(3)的形式

同时假设这些参考单元的回波信号只包含噪声,以及参考单元之间噪声相互统计独立。则信号检测过程可以表示为

如果该统计量大于门限g,则判决有目标,否则判决没有目标。统计量在目标不存在且背景噪声均匀的条件下概率密度函数表示为[11]

根据该分布可以确定判决门限为

其中,pfa表示单个雷达站下CA-CFAR检测器的虚警概率。
假设目标回波起伏特性为Swerling I型,此时的信噪比定义为,目标存在的条件下CA-CFAR的检测概率可以表示为

若在参考单元和检测单元上即在目标所在距离维上施加功率不同的噪声,则该检测器的虚警概率表示为
其中,μ0表 示H0下 检测单元的噪声功率值,μi表示H0下 第i个参考单元的噪声功率值。此时检测器已不是恒虚警检测器。
检测概率表示为
其中,ν0表示H1下检测单元的回波信号功率值,μi表示H1下第i个参考单元的噪声功率值。
2.2 敌方雷达对己方施加噪声的截获性能
若目标回波相互独立,各通道接收的回波信噪比相同,则非相参检测器是最优检测器[12–14],因此这类检测器也被广泛应用于分集雷达中。若敌方采用的是非相参检测器,则默认为敌方雷达接收机存在静默噪声检测模块。假设进行非相参积累的脉冲的个数是Nd,下面分析敌方采用非相参积累检测器对噪声干扰进行检测,存在噪声干扰条件下的回波信号矢量为
检测器的检验统计量TI写为
在H0假设下统计量的概率密度函数可以写为

表示Gamma函数。因此,非相干积累检测器的虚警概率可以表示为

其中,G(·)表 示为Gamma累积分布函数,gI表示非相干积累检测器的门限。
敌方雷达对噪声的检测概率表示为

也可以认为是敌方雷达对施加噪声干扰的截获概率。
3 静默噪声掩护技术的基本原理
在对目标附近距离单元施加静默噪声的过程中,如果突然大幅度地在目标附近增加噪声干扰,则会触发虚警,敌方知道自己受到干扰后则会做出应对措施,但此时己方不能达到自己想要的效果。所以考虑施加的噪声功率从某一初始值开始,以某种方式在距离维上缓慢地增加噪声功率,使得检测单元的信号被噪声淹没,以至敌方雷达难以检测出目标信号。这种技术类似于一种密集假目标干扰技术[15,16]。不同的是,干扰机发射的是密集的调制功率后的高斯白噪声信号,并且根据雷达位置,在距离维上对目标附近的距离单元进行覆盖。考虑施加的噪声干扰从距雷达站最近的参考单元开始增加,增加的速率较大时容易触发敌方雷达的虚警,增加较慢时不能干扰到敌方雷达对目标的检测。因此,合理控制静默噪声的施加包络及速率,从而使敌方雷达对目标有较低的检测概率以及对噪声干扰有较低的截获概率是该技术的主要研究内容。
静默噪声掩护大致分为以下4个步骤:
第1步:估计敌方雷达设备的位置。部分雷达位置是确切已知的,部分雷达位置可能是时变的,比如舰载雷达、机载雷达和车载雷达等,针对这类雷达,可以通过雷达处理多脉冲信号估计敌方雷达位置。
第2步:确定静默噪声掩护窗口。突然增加的噪声电平会触发雷达检测器虚警,所以噪声功率应逐渐提升,使对方的自动增益控制(Automatic Gain Control,AGC)逐渐升高到一定电平,直到战机回波信号被淹没,随后逐步降低干扰噪声功率,所以需要选择恰当窗长。
第3步:选择掩护噪声的功率包络及增加速率。在窗口内,噪声功率施加速率较快容易触发虚警,噪声功率施加较慢则在有限窗长内难以达到较高的噪声功率,合理选择噪声功率包络才能达到掩护自身目标的效果。
第4步:按照指定包络功率,随机产生噪声信号,干扰敌方雷达。
己方对敌方雷达施加的静默噪声功率水平变化示意图如图2所示。

图2 静默噪声功率水平变化示意图
4 静默噪声射频掩护功率控制技术研究
在敌方雷达对目标进行探测时,己方期望施加噪声干扰后敌方雷达不触发虚警,并且要求敌方雷达的检测概率降低以使雷达对目标的探测能力减弱。因此,考虑在目标所在距离维上增加检测单元和参考单元的噪声功率水平,以使得敌方雷达的虚警概率波动不大,同时降低对目标的检测概率。
以下采用4种不同施加噪声功率的方式分析噪声干扰对敌方雷达的虚警概率以及敌方雷达对目标的检测概率的影响。噪声干扰功率包络函数分别是分段指数函数、V型函数、高斯分布函数和2次函数,己方将以这4种施加方式在参考单元和检测单元上施加静默噪声干扰,这4种函数施加方式的噪声功率变化示意图分别如图3—图6所示,其模型如下:
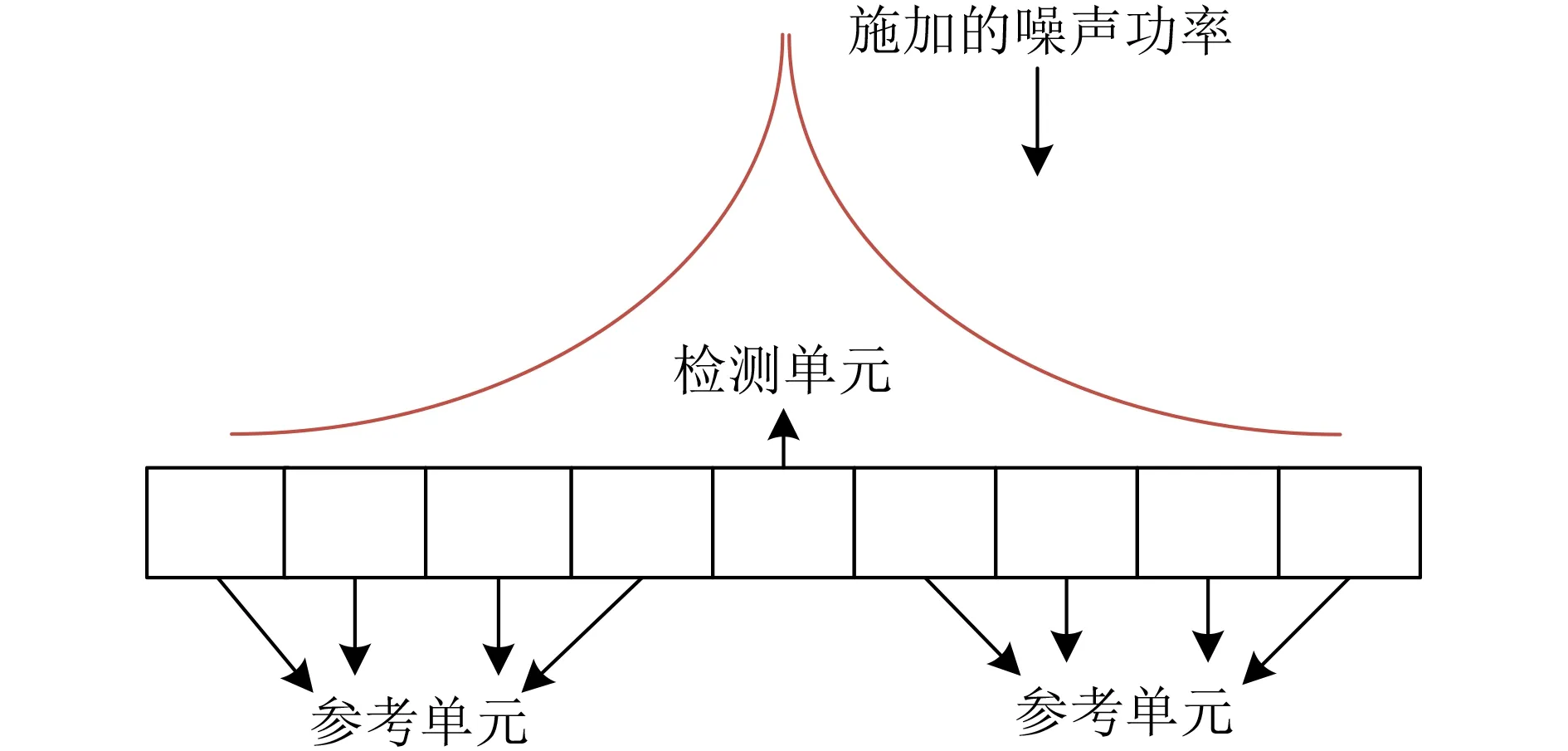
图3 静默噪声以分段指数函数形式增加示意图

图4 静默噪声以V型函数形式增加示意图

图5 静默噪声以高斯分布函数形式增加示意图
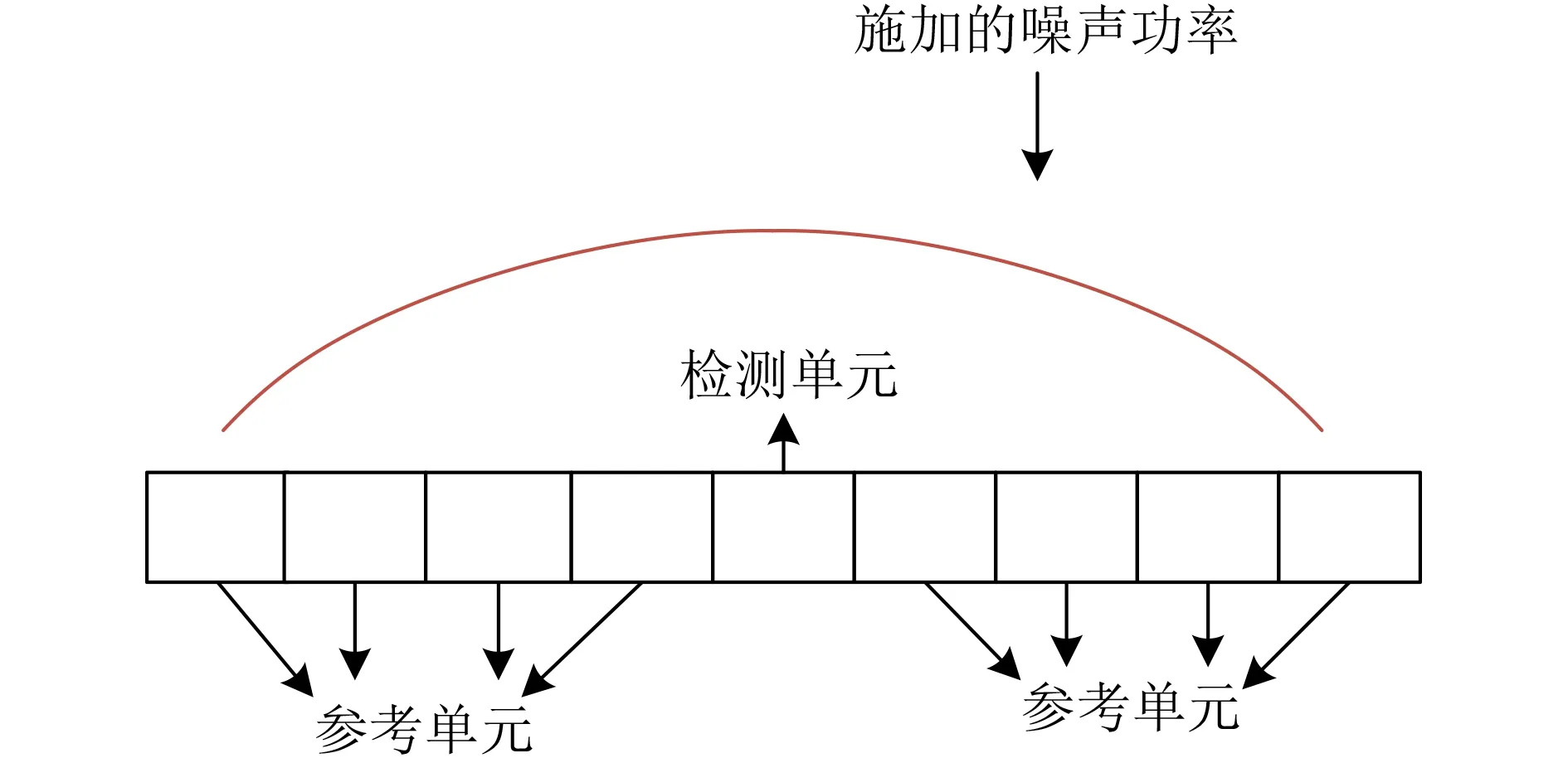
图6 静默噪声以2次函数形式增加示意图
分段指数函数
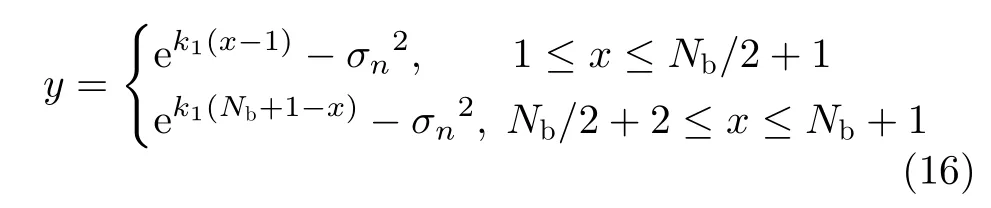
其中,y表示施加的静默噪声水平,y ≥0。这里的Nb设置为偶数,x表示在距离维上参考单元与检测单元的顺序标号。k1表示常数,由施加干扰后的检测单元噪声功率决定。例如,若检测单元噪声功率为nc,则k1=2 ln(nc)/Nb,对于噪声包络为分段指数函数的情况,检测器的虚警概率和检测概率可由式(8)和式(9)计算得到,具体表达式为
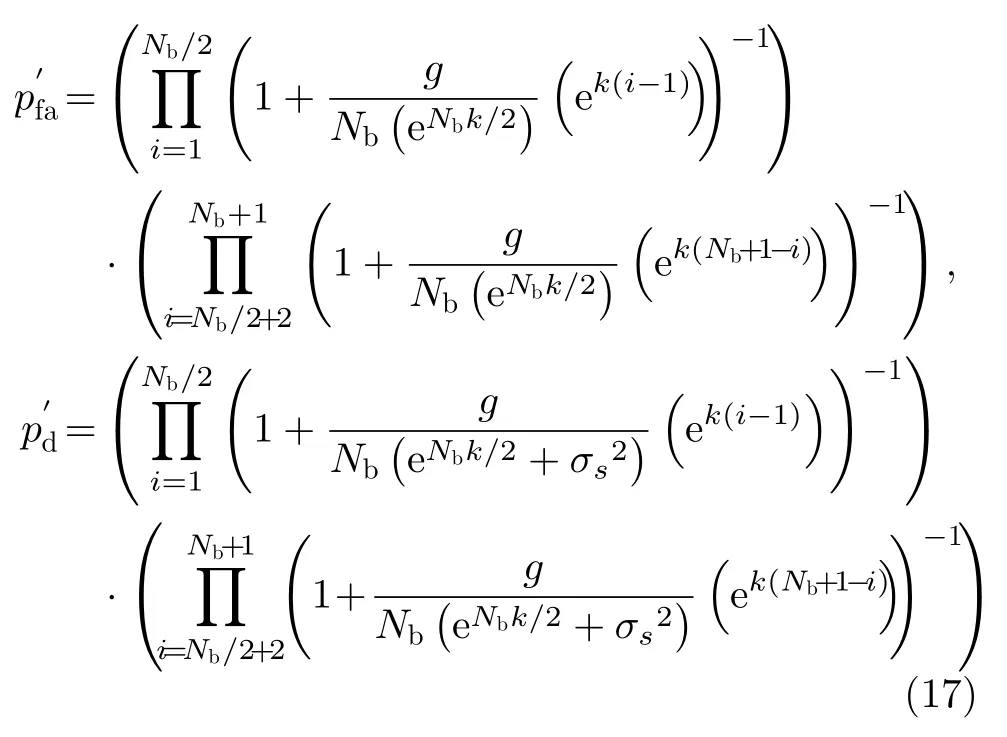
以下不同噪声功率包络下检测器的虚警概率和检测概率均可类似写出。
V型函数
高斯分布函数

其中,x0表示高斯分布的均值,σ02表示高斯分布的方差,这里令σ02=1,x0=Nb/2+1,1≤x ≤Nb+1,施加的静默噪声功率变化同高斯分布的形态一致。
2次函数

其 中,1≤x ≤n+1,以 上k1,k2,k3,k4均为常数,这里c表示在检测单元上施加的噪声功率值,与k1,k2,k3,k4一致,均由施加干扰后的检测单元噪声功率决定。因此,施加噪声的增长情况由最高点和不同包络所决定,如图7所示。在后续仿真中也会说明如何选择合适的包络和噪声功率增长速率。
图7 施加的噪声包络示意图
5 静默噪声检测技术研究仿真分析
5.1 静默噪声对恒虚警检测器的影响
设接收到回波信号在检测单元上的信噪比为15 dB,敌方的CA-CFAR检测器的虚警概率设为10–6,参考单元数为16,基底噪声功率σ02=1W,检测单元上施加的噪声功率范围控制在0~4 W,等效于同一包络下噪声功率增加的速率值。此时敌方并不知道我方正在施加干扰噪声,因此仍采用原始的恒虚警检测器的门限阈值对接收回波信号进行判决,敌方雷达的虚警概率则会发生变化。由式(8)、式(9)可得,施加上述4种功率包络的噪声干扰后检测器的虚警概率和检测概率随噪声干扰增长速率的变化曲线如图8和图9所示。
图8 虚警概率随干扰增加速率变化曲线
图9 检测概率随干扰增加速率变化曲线
从图8可以看出,干扰功率在距离维上以2次函数的方式递增,此时改变其增长速率得到的敌方雷达虚警概率波动最小。其次在低增长速率的情况下,施加V型函数和分段指数函数功率包络噪声下较平稳,高斯函数次之。
以不同噪声功率控制的方式对目标实施噪声干扰得到的检测概率随施加在检测单元的噪声功率值变化如图9所示。其中,以2次函数功率包络增加的噪声干扰得到的检测概率下降得最快。在考虑对目标附近施加静默噪声干扰时,既要考虑敌方雷达检测器虚警概率的稳定性,又要使检测概率较低,结合图8和图9,以2次函数方式控制噪声功率具有较好的适用性,虚警概率波动不大,同时使检测概率下降,使得敌方在感知不到干扰的情况下难以检测到目标信号。
同样在距离多普勒维上检测目标可以得到类似的结果,其中参考滑窗设置为9×9,其他仿真参数与前述仿真基本一致,蒙特卡罗次数为107,仿真曲线如图10和图11所示。
图10 距离多普勒维下虚警概率随噪声增加速率的变化曲线
图11 距离多普勒维下检测概率随噪声增加速率的变化曲线
因此,选择施加2次函数功率包络噪声有效降低敌方雷达对我方目标的检测能力,下面介绍在敌方雷达同时对噪声干扰进行探测时的情况。
5.2 静默噪声对非相参检测器的影响
当敌方是基于通道基底噪声对外界干扰进行检测时给出以下数值仿真结果。假设敌方3个雷达站的CA-CFAR检测器的全局虚警概率是10–6,参考单元数均是8个,我方采用2次函数功率包络去施加噪声干扰,未施加噪声干扰之前接收回波信噪比设为20 dB,设3个雷达站接收的回波信噪比相同,非相参积累检测器的虚警概率是10–6,积累脉冲数分别是2,4和6个,此时得到敌方雷达对目标的检测概率和对噪声干扰的截获概率曲线如图12所示。
图12 静默噪声增加后的敌方雷达探测能力与敌方电子侦察设备的截获能力对比曲线
己方在对敌方施加静默噪声的过程中,可能会发生以下4种情形:(1)敌方检测到我方目标且发现我方干扰;(2)敌方检测到我方目标但未发现我方干扰;(3)敌方未检测到我方目标且未发现我方干扰;(4)敌方未检测到我方目标但发现我方干扰。针对这4种情形,己方期望的情形为情形(3),即敌方雷达对目标的检测概率较小,同时对噪声干扰的截获概率较小,因此对于施加的静默噪声功率可以得到如式(21)所示的不等式约束

其中,pd表 示敌方雷达检测概率,pi表示敌方雷达截获概率。ε1表示敌方雷达能检测到目标的检测概率最小值,ε2表示敌方电子侦察设备能检测到干扰的概率最小值,即截获概率最小值。根据两个不等式得到噪声功率的交集为施加静默噪声功率的控制范围。设ε1为0.6,ε2为0.4,敌方雷达对目标的检测概率以及对噪声干扰的截获概率曲线如图13所示,其中蓝色横线表示ε1,红色横线表示ε2,绿色双箭头在横坐标上的范围表示噪声功率速率控制范围。
图13 噪声功率速率控制范围示意图
从图13可以看出,在ε1和ε2约束下施加在检测单元的噪声功率控制范围在0.2~4 W。选择合适的噪声功率值随机产生噪声信号,一方面敌方雷达检测器难以触发虚警,另一方面己方施加噪声干扰后敌方雷达既检测不到目标存在也感知不到我方施加了噪声干扰,为后续我方任务的执行提供了便利。
ε1和ε2的选择以及敌方雷达信号处理的算法决定了由两个不等式得到的噪声功率范围是否有交集,若有交集则己方施加确定范围内的噪声干扰结果对应情形(3),也就是施加的一定范围内的静默噪声可使敌方雷达难以检测到目标信号以及己方施加的噪声干扰,若无交集则施加任何范围内噪声功率的结果对应情形(1),(2),(4),意味着施加任何噪声功率都无法避免敌方雷达对己方目标或施加噪声干扰的感知。
6 结论
在战争中提高武器生存、突发和纵深打击能力所需要的重要技术就是隐身技术,本文针对现有雷达隐身技术的复杂性和不稳定性,提出了一种新的雷达隐身技术,通过干扰机向敌方雷达发射静默噪声干扰,来提高敌方雷达接收机获得的参考单元和检测单元的背景噪声水平,从而使敌方雷达的检测性能降低,同时需要保证敌方雷达对施加噪声的截获概率较小,使得我方施加的噪声干扰不会被发现。本文从敌方雷达的信号处理的角度分析了4种提高距离单元噪声基底的方法下敌方雷达对目标的检测概率和虚警概率的变化情况,最后发现按照2次函数模型施加噪声的方法可以在虚警概率波动不大的情况下降低敌方雷达的检测概率,此外在2次函数模型下又分析了敌方雷达对施加的静默噪声功率的发现概率(截获概率)和对目标的检测概率之间的联系。可以发现,当敌方截获概率和检测概率的最小值在检测性能曲线上对应的噪声功率范围产生交集时,施加一定范围内的噪声功率可以规避敌方雷达的作用,若无交集,则施加静默噪声对敌方雷达无效。
