航天机构传动效率高低温测试平台的研制
2021-10-23金弘哲王彬峦鞠枫嘉哈尔滨工业大学机电工程学院机器人技术与系统国家重点实验室哈尔滨150001
金弘哲,印 鸿,王彬峦,鞠枫嘉,赵 杰(哈尔滨工业大学 机电工程学院 机器人技术与系统国家重点实验室, 哈尔滨 150001)
进入21世纪后,随着我国对太空探索的不断深入和发展,对航天器的功能和性能都提出了更高的要求.航天机构的中的传动部分的性能及可靠性决定了整机的工作性能和可靠性[1].鉴于其在航天领域的重要地位,必须针对传动机构的工作状况和整机性能进行严格的测试,确保其各项指标达到了设计要求.然而,目前常用的测试设备存在成本高、通用性差等问题,并且在高低温环境下对航天机构物理性能测试的方法和理论等方面缺乏一个完整的理论体系,导致测量结果的准确度无法保证,影响对航天机构的性能评估[2-5].因此,针对高低温环境下的航天机构的性能测试需求,设计一款能够在±100 ℃温度条件下对航天机构(如RV减速器)性能进行验证的传动效率测试平台,并建立系统的测试方法和设计理论体系,对于我国在地面模拟空间机构的测试技术的发展有重要的含义[6-10].
1 平台测试原理
该高低温传动效率测试平台主要针对±100 ℃温度条件下的航天机构.
根据传动效率的测试公式[11-12]:
(1)
其中:TiTo为输入端和加载端的力矩测量值,ni,no为输入端和加载端的转速值.
又因为测量的力矩值包含了轴系的摩擦阻力矩,阻力矩值受温度影响较大,尤其是低温环境.因此,在不同温度下,需要首先对平台的摩擦阻力矩值进行测量,以此修正测量的力矩值,从而得到输入输出端力矩的实际值.通过实验确定传动效率具有重要的意义[13-14].即力矩计算公式为

(2)

本文选择行星齿轮增速器为典型被测对象,增速比为20.77.根据测量要求,先以输入转速15 r/min驱动增速器,加载端加载力矩为1.0 N·m.待驱动力矩值稳定后,以固定频率持续采集多组数据保存.然后驱动电机反转,通过同样的方式多次采集数据并保存.
2 技术方案
高低温环境下传动效率测试平台的设计主要包括三个方面:机械结构设计、电气系统设计和平台软件设计.
2.1 机械结构设计
根据前文的测试原理,通过测量输入和输出功率,得到系统的传动效率值[10].其系统设计方案如图1所示.本平台由7个部分组成:1和7是扭转驱测一体化单元,此单元包括加载模块和力矩测量模块,主要为平台提供转动力矩,并测量出输入输出端的力矩值;2和6是调整模块,用于测试轴系的同轴度调整;3是高低温箱,用于实现被测件高低温±100 ℃环境;4是被测对象以及根据被测对象设计的测试工装组合;5是基础平台,包含基础大底板、穿箱立柱结构和轴系辅助调整结构,是高低温箱内被测模块,及箱外支撑模块、调整模块的基础.
收稿日期:2021-03-12.
基金项目:国家重点研发计划项目(2017YFF0108000)重大科学仪器设备开发.
作者简介:金弘哲(1976-),男,副教授,博士研究生导师.研究方向:复杂系统建模与分析、机器人随动控制理论与应用、不确定系统函数近似化理论、智能控制理论与应用.
针对±100 ℃的高低温环境,平台采取了以下几个方面的适应性设计.首先,在箱体内部支撑结构中,选用了低膨胀系数的殷钢材料,从而减小箱体内部支撑结构在高低温环境下的垂直方向浮动量.其次,在进行箱内轴承配合设计时,一方面预留了轴承的与轴和座孔之间的膨胀间隙;另一方面对轴承采用弹性预紧的方式,来适应高低温情况下轴承游隙的变化.并且也设计了相应的传感器局部热防护以及气体密封设计.
2.2 电气系统设计
传动效率高低温测试平台的电气系统分为数据采集处理系统和运动控制系统.数据采集处理系统包含传感器模块以及信号采集模块,运动控制系统包含驱动电机、加载电机、驱动器和控制器.电气系统结构图如图2所示.

图2 高低温传动效率测试平台电气结构图Figure 2 Electrical structure diagram of high and low temperature transmission efficiency test platform
传感器模块由输入端编码器和力矩传感器以及输出端的编码器和力矩传感器四个传感器构成.力矩传感器选用UNIPULSE公司的UTM II系列旋转式扭矩传感器,该扭矩传感器输出±5 V模拟电压信号.根据增速器这一典型被测对象,输入端力矩传感器量程选择±50 N·m,输出端量程选择±5 N·m.输入端角度编码器选择海德汉26位单圈绝对式编码器RCN 5310,精度达到±5″,动态响应特性好.编码器信号输出接口为EnDat 2.2标准接口.输出端角度编码器选用英国Zettlex高低温环境圆光栅INC-3系列,采用BiSS-C标准接口通讯.
输出端UTMII-50Nm和输入端UTMII-5Nm力矩传感器模拟信号采集模块为NI-9215,该模块是±10V,16位差分模拟输入.输入端的海德汉角度编码器RCN5310采用SEA-9510模块进行数据采集.SEA 9510模块支持海德汉EnDat2.1和2.2标准.高低温环境编码器INC-3采用BiSS-C协议输出采集信号,选择SEA-9521模块进行数据采集.SEA-9521模块支持单独配置的BiSS-C或SSI标准通讯编码器数据采集.
根据被测对象增速器的要求,输入端电机输出力矩较大,负载端电机出力较小,选用LS迈克彼恩伺服电机.输入端型号为APM-SB02AMN2,额定功率200 W,19位绝对式编码器,额定扭矩0.64 N·m,配套减速比为80 ∶1的行星减速器.输出端型号为APM-SA015AMN2,额定功率为150 W,额定扭矩0.48 N·m,配套行星减速器减速比为4 ∶1.
平台总控制器为NI公司的CompactRIO-9035型号,驱动器选择以色列公司Elmo的Gold系列驱动器,型号GOLD-SOLO-WHI-200-10,采用BiSS-C协议传输编码器信息.驱动器与控制器间采用EtherCAT总线通讯,控制器cRIO-9035作为主站,输入端电机驱动器作为从站01,输出端负载电机驱动器作为从站02,采用CANopen协议.
2.3 平台软件设计
传动效率高低温平台软件主要包括:主操作界面及信息数据库部分.软件启动后,即进入如图3所示的软件测试主界面,主界面主要有七大区域,包括状态管理区、运动控制区、环境参数与辅助调整区、数据实时显示区、图形显示区、测试结果计算与分析区以及测试任务智能规划参数设置区,可以测试航天机构在高低温环境下的传动效率、输入输出力矩、输入输出转速等内容[15].

图3 平台的测试主界面Figure 3 Main test interface of the platform
此外,测试软件还具备软件快速搭建向导功能、软件参数自动辅助调整功能、软件数据分析计算功能、软件专家数据库功能、软件可扩展功能、测试任务智能规划功能.
3 平台不确定度评定
根据不确定度传播率[16-17],传动效率测试的合成标准不确定度计算公式为:
(3)
其中:uc(η)是合成的标准不确定度,uTo,uno,uTi,uni分别是输出力矩、输出转速、输入力矩和输入转速的标准不确定度.
3.1 平台转速测量不确定度
转速测量模型:
(4)
其中:Δθ是定时间隔内的角速度增量,Δt是定时间隔值.
不确定度的来源主要有三个:一是绝对式编码器引入的不确定度分量uΔθ;二是定时时钟引入的不确定度分量uΔt;三是转速测量的重复性引入的不确定度.
在测量过程中,Δθ与Δt是相互独立的,根据测量不确定度传播率,可得:
(5)
其中:u(Δθ)是角度增量的测量不确定度,u(Δt)是定时间隔的测量不确定度.
角度增量测量的不确定度u(Δθ)为编码器刻划误差引入的不确定度,传动效率高低温测试平台所用角度编码器选型如下:输入端所用编码器为海德汉RCN 5310绝对式编码器,分辨率为26bit,根据传感器技术手册,系统精度±5″;输出端所用编码器为Zettlex INC-3H-90绝对式编码器,分辨率19bit,根据传感器技术手册,系统精度≤98″.编码器刻划误差引入的不确定度分量按照B类标准不确定度评定.根据编码器系统误差,估计误差服从正态分布,包含因子k=2.根据B类标准不确定度计算公式:
(6)
其中:a是被测量可能值区间半宽度,k是包含因子.可以得到各编码器刻划引起的不确定度分量,如表1所示.

表1 编码器刻划误差引入的不确定度分量
定时间隔的不确定度uΔt影响因素包括计数器测量周期的不确定度分量u1和计数器采样时间的不确定度分量u2.因此定时间隔的不确定度为
(7)
计数器周期测量的测量模型为
(8)
其中:τ0是计数器周期测量时选用的时标,Tx是被测周期的实际值,ΔTx是被测周期的偏差,Δfc是晶振频率的偏差,fc是晶振频率的实际值.

(9)
代入公式得
计数器采样时间引入的不确定度分量u1:

(10)
因此,定时间隔的不确定度为
(11)
(12)
其中:σi是输入转速测量的样本标准差,c是输入转速测量的样本个数.
同理,可以得到输出转速的重复测量引入的不确定度分量.
采样频率100 Hz时的输入端和输出端单次转速测试的相对合成不确定度分别为:
(13)
(14)
将重复性引入的不确定度分量计算在内,则输入、输出转速的合成标准不确定度为:
(15)
(16)
3.2 平台扭矩测量不确定度
由于扭矩传感器所测量力矩值包括了轴系轴承摩擦在内的干扰值,且轴承的摩擦阻力在不同温度下(尤其是低温环境)会显著增加,因此必须对轴承力矩值进行修正.

(17)
JJF 1059 2.20中对系统误差的定义如下:
(18)


(19)
以及y的修正值:
Δy=-β′
(20)
输入端和输出端所用UNIPULSE产UTM-II系列的50 N·m和5 N·m量程扭矩传感器已具备校准证书.输入端扭矩传感器量程为±50 N·m,不确定度为Urel=0.1%(k=2),输出端扭矩传感器量程为±5 N·m,不确定度为Urel=0.1%(k=2).
根据不确定度计算公式(15)扭矩测试的不确定度为
3.3 平台合成不确定度
根据不确定度计算公式(3)计算平台满量程测试的合成不确定度(单次测量):
ucrel(η)=
取k=2,计算扩展不确定度为:
Urel=k×ucrel(η)=2×0.219%=0.438%
平台传动效率测试设计精度满足≤0.5%.
4 实验验证
对增速器被测组件进行四组不同工况测试,验证平台实际测试的不确定度是否满足指标要求.被测对象为一种行星齿轮增速器,增速比约为20.77.根据测量要求,先以输入转速15 r/min驱动增速器,加载端加载力矩为1.0 N·m.待驱动速度和加载力矩稳定后,以固定频率进行持续采集多组数据保存.四组工况分别为:第一组+24 ℃(常温),第二组+50 ℃,第三组+100 ℃,第四组-50 ℃.以第三组为例,测量环境如图4所示.测量结果包括了输入输出的角速度曲线、输入输出的扭矩图以及计算得到的传动效率曲线,分别如图5~7所示.摩擦力矩测量值及其拟合曲线如图8所示.

图4 高低温环境实验Figure 4 Experiment in high and low temperature environment

图5 输入输出角速度曲线Figure 5 Input and output angular velocity diagram

图6 输入输出扭矩图Figure 6 Input and output torque diagram

图7 传动效率曲线图Figure 7 Transmission efficiency graph
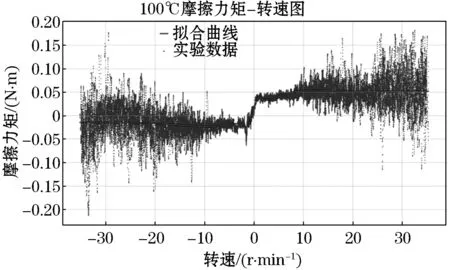
图8 +100 ℃摩擦力矩-转速图Figure 8 Friction torque speed diagram at 100 ℃
根据采集的数据值,计算传动效率的合成标准不确定度值,可以得到四种工况下平台的不确定度值分别为0.250%、0.438%、0.281%和0.388%(高温到低温排序),其精度均在0.5%以内.
除了上面提到的四组平台不确定度的验证实验,本平台又测量了行星齿轮增速器在-50℃~100 ℃温度环境下(选取了七组温度值)的传动效率值.可以得到传动效率值随着温度的变化趋势如图9所示,各个温度下的传动效率数值如表2所示.

表2 某型号增速器在不同温度下的传动效率值
5 结 语
本文设计与研制了一种针对航天机构在高低温环境下测试传动效率的平台系统.根据输入输出功率之比为传动效率的测试原理,针对±100 ℃的极端温度环境,完成了测试平台机械结构、电气系统以及测控软件的设计.根据测试平台传动效率测试精度小于等于0.5%的指标要求,对整体系统的不确定度进行分析与计算,并且通过±100 ℃之间各个温度环境下的实验和计算,成功验证了平台的测量准确度能够满足要求.极端环境下航天机构的性能测试一直是我国航天事业中重要的一环,该测试平台仍然具有较大的发展潜力,在未来的研究中将会对平台的真空环境适应性和平台的拓展性进行进一步的研究.
