基于机器视觉的零件圆心距在线测量系统设计
2021-10-22彭晶鑫石秀东姚晨明
彭晶鑫, 石秀东, 姚晨明, 孙 攀
(1.江南大学 机械工程学院, 江苏 无锡 214122;2.江南大学 江苏省食品先进制造装备技术重点实验室, 江苏 无锡 214122)
随着“中国制造2025”发展战略的深入推进,工件尺寸特征测量技术也在飞速发展,工业上对于新的测量技术有更高的要求,需要满足自动化,高精度,高效率的特点[1]。测量精度与相机的分辨率、光学成像系统以及图像处理算法密切相关,在技术方面如何提升尺寸测量的精度是现代制造业重要的研究方向[2]。相机分辨率的盲目提高势必会带来成本的增加,如何在硬件条件一定的情况下提升测量精度,就需要在图像处理算法上做出改进。
在尺寸测量系统中,测量精度与边缘检测的精度有很大关系。目前,边缘检测中比较经典的算子包括Canny,Roberts,Sobel,Prewitt和Gauss-Laplace算子等[3]。但是,这些算子的检测精度在像素级。随着工业生产中对产品精度要求的不断提高,像素级的检测精度已经不能满足实际的生产需求。此时亚像素级别的检测算子引起越来越多的关注[4]。将边缘领域的像素分解达到细化边缘,准确定位的方法被称为亚像素级边缘检测算法。比较常见的亚像素检测方法包括拟合法、插值法和空间矩等[5~9]。其中Zernike矩[10]作为经典的正交矩,具有对图像旋转以及尺寸变化稳定不变的特性,使得定位精度较高,在实际生产过程中应用较为广泛。课题组设计了一种基于Zernike距亚像素级别边缘点拟合圆心测量零件圆心距尺寸的在线检测方法。
1 测量系统概述
该测量系统主要由4个部分组成:图像采集、图像算法处理、尺寸测量和结果输出。其工作流程如图1所示。

图1 测量系统工作流程图Figure 1 Measuring system flow chart
2 测量系统硬件设计
测量系统的硬件主要包括LED光源、工业相机、镜头、计算机和试验工作台。光源选择的原则就是突出目标轮廓与背景分离,综合考虑选择LED背向平行光源;工业相机用来采集图像,并通过千兆网口传输到计算机内存中,本系统采用海康威视的MV-CA060-10GC型CMOS面阵相机,分辨率为3 072×2 018像素。镜头选择海康威视MVL-HF0828M-6MP,具有高分辨率、画面清晰度均匀性高及超低畸变等优点。实验处理器为Intel i5-8300CPU@2.3GHz,内存8.00 GiB;QT平台基于OpenCV机器视觉库与C++结合完成测量系统界面开发。
3 测量系统算法设计
测量系统流程如图2所示。

图2 测量系统算法流程Figure 2 Measuring system algorithm flow
图像处理算法决定了测量系统的准确性,该测量系统主要由图像预处理、图像分析和系统标定等步骤组成。课题组以双圆孔型零件为研究对象,为了达到准确测量零件圆心距的项目需求,设计了相关图像处理算法。
3.1 图像预处理
图像预处理是图像处理中比较重要的步骤。既能对图像的视觉效果有所改善,又能减少后续处理的数据内容,便于提高测量系统的效率及精度[11]。
3.1.1 滤波处理
平滑滤波以解决图像中的噪声是图像处理领域中常见阶段,传统的滤波算法(例如高斯滤波、中值滤波、均值滤波等)可以合理地消除噪声,但是存在边缘模糊的问题,不利于边缘轮廓的准确定位。课题组使用了各向异性扩散滤波算法,基本原理是将图像中的灰度值视为化学物质的质量分数值,物质之间的外部扩散等同于平滑滤波,根据合适的热扩散系数,可以提高区域内的平滑度并减小区域之间的平滑度差异的实际效果,从而有效处理噪声,保留边缘细节。图3为扩散滤波处理后的二维效果图,图4为扩散滤波处理后的三维效果图。在经过一系列参数设置试验后,发现当迭代次数λ=10,使用参数t=0.1时,既能很好地去除噪声,又没有对边缘造成破坏,达到了理想中去噪保边的效果。

图3 扩散滤波处理二维效果图Figure 3 2D effect diagram of diffusion filtering processing

图4 扩散滤波处理三维效果图Figure 4 3D effect diagram of diffusion filtering processing
3.1.2 图像阈值分割
在图像处理中将待测工件与背景分割,避免对非“兴趣”区域进行运算,提高图像处理算法的效率。在图像分割的过程中,阈值的选择对边缘的提取有很大程度的影响[12-14]。公式如下:

(1)
式中:f(x,y)为像素点(x,y)的灰度值;g(x,y)为图像分割后的像素点坐标值;T为阈值(以能完整提取“兴趣”为原则,文中采用最大类间方差法求得T为101)。
式(1)表示的实际含义是图像中像素点灰度值大于阈值灰度值时T设置为1,如果低于阈值灰度值时,则T设置为0。为避免遗漏零件轮廓边缘,采用闭运算进行形态学处理,图像分割效果如图5所示。
3.2 图像分析
3.2.1 亚像素边缘检测
Zernike作为一种积分算子,应用于亚像素检测中定位精度较高,同时抗噪声性能良好,在边缘检测中优势明显。基本原理为:由于Zernike矩具有旋转不变性,基于理想的阶跃边缘模型,根据矩的关系式结合合适的阈值处理方式,求得相关边缘参数,从而定位亚像素边缘点。Zernike矩的关键是极坐标内部空间中准确定位单位圆x2+y2≤1的复数函数集:
Vnm(x,y)=Vnm(ρ,θ)=Rnm(ρ)ejmθ。
(2)
式中:n为多项式阶数,m为幂指数,均为整数并满足n≥0,n≥|m|且n-|m|为偶数;ρ为边缘点到圆心的直线距离;θ为边缘点垂线与x轴之间的夹角;j表示虚数单位。
Rnm(ρ)为实值径向多项式:
(3)
边缘点的n阶m次Zernike矩Znm定义为:
(4)

如图6所示,将像素看作单位圆,O为像素中心,1个像素单位为半径。边缘分割线f(x,y)将像素点圆进行再次细化分成2部分,灰度值分别为h和h+k(k为阶跃灰度值),d为像素中心到边缘分割线的距离。图6(b)是图6(a)沿像素中心顺时针旋转θ后的边缘模型。
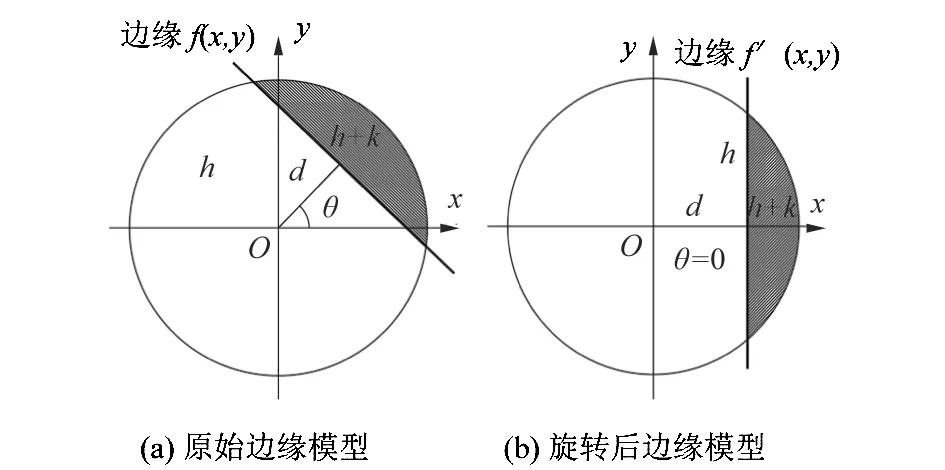
图6 Zernike矩边缘模型Figure 6 Zernike moment edge model

(5)
求得4个模型参数θ,d,h和k:
(6)
在N×N的Zernike模板内,亚像素点的坐标公式:
(7)
式中:(xs,ys)表示边缘亚像素点坐标,(x0,y0)表示像素中心点坐标。
亚像素边缘点的判定条件:k≥kt且d≤dt。k为灰度差值;kt为灰度阈值;dt为距离阈值。阈值的选择对于边缘点是否能准确定位至关重要。如果灰度阈值kt取值太小,则会导致虚假边缘,如果灰度阈值kt过大,则会丢失边缘。传统的Zernike矩边缘检测优化算法都是固定灰度阈值,效率较低,精度不高。课题组采用最大类间方差法对零件全局图像进行最优灰度阈值选取,提升了测量系统的精度。实现该图像算法代码如下:
Zernike_Subpixel (const cv::Mat img,
cv::Rect rect,
double k_value,
Zernike_Matric zernike_matric,
Vector
Point2f rawCenter,
float rawRadius,
int ringthickness);
如图7所示,Zernike亚像素边缘检测算子可以达到细化粗边缘像素点,从而实现精准定位的目的。
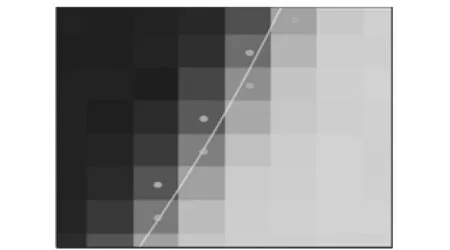
图7 边缘检测示意图Figure 7 Schematic diagram of edge detection
3.2.2 圆拟合
课题组采用最小二乘法对零件圆轮廓的亚像素边缘特征信息进行圆心的拟合。根据最小均方差准则,使在该平面圆的圆周上采集的离散点(xi,yi)与理想圆圆心(xe,ye)距离残差平方和最小化。离散点到圆心的距离di表示为:
(8)
边缘轮廓上的点与理想圆的误差εi可表示为:
(9)
依据最小二乘法原理轮廓各个边缘点与半径r的误差平方和M最小,即:
M=min(∑i∈E(εi)2)。
(10)
式中E为边缘轮廓点的集合。
4 实验结果分析
搭建实验平台,对试件进行15次测量实验,根据最小二乘法,获取左右圆的圆心位置分别为(x1,y1),(x2,y2)。以圆心之间的欧式距离作为像素尺寸,则圆心距计算
(11)
利用式(11)计算出的圆心距作为像素距离,单位为像素,利用系统预先标定求得的像素当量n可以求得圆心距的物理尺寸。以三坐标测量机圆心距测量数据为标准参考值,该测量系统测量值与三坐标机测量误差在0.01 mm以下,测量结果曲线如图8所示。对比2种测量方法的数据曲线,表明该系统测量结果可靠,精度满足实际生产需求。

图8 测量结果曲线Figure 8 Graph of measurement results
5 测量系统界面设计
在QT平台下,利用C++语言开发了圆心距测量系统。采用OpenCV视觉库完成图像处理算法的设计,结合C++语言,完成界面设计,测量界面如图9所示。该测量系统能够实时显示试件2个内圆的圆心距和圆心坐标。

图9 测量系统界面Figure 9 Interface of measuring system
6 结论
课题组设计了基于机器视觉技术的零件圆心距在线测量系统,该系统利用OpenCV视觉库进行算法设计,实现对零件圆心距的非接触式智能化测量。使用改进的Zernike矩亚像素边缘检测算子检测边缘轮廓点,在相机分辨率不变的情况下,提升了测量精度,同时节省了硬件配置成本,具有一定的工程实用价值。该测量系统下一步的任务是不断完善其通用性,并应用于准确测量孔型零件的其它主要参数中。
