嫦娥五号探测器供配电系统设计与验证
2021-10-22蔡晓东
蔡晓东,杜 青,夏 宁,王 超,杨 祎
(北京空间飞行器总体设计部,北京 100094)
0 引 言
嫦娥五号任务作为中国复杂度最高、技术跨度最大的航天系统工程,首次实现了中国地外天体采样返回。作为中国首次月面无人自动采样返回任务,在整个在轨飞行过程中,供配电系统的主要任务是为探测器产生、贮存和分配电能,以满足探测器在整个飞行过程中的一次电源供电、配电需求;提供指令母线的变换与分配;提供运载火箭和探测器间,轨道器与着陆器、返回器间,着陆器与上升器间,以及各用电设备间的电气接口;通过低频电缆网实现功率和信息的传递,并构成完整可靠的接地系统。
嫦娥五号任务属于探月三期工程,是探月工程“绕、落、回”三步走中的最后一步。探月一期、探月二期实现了月球概貌探测、月球软着陆以及月表巡视勘察。与探月一期、二期工程相比,探月三期工程要实现的月面无人自动采样返回任务更为复杂,给探测器设计带来很大的挑战[1-9]。根据探测器总体方案,供配电系统设计的难点主要表现在以下几个方面:
1)供电需求复杂,工作模式多[10-12]。整个探测器由轨道器、上升器、着陆器和返回器构成,除存在四器组合体、单器独立工作状态外,还存在着陆上升组合体、轨返组合体、轨返组合体与上升器交会对接等工作状态。供配电系统需保证多器、多工作模式条件下的能源稳定供给。
2)供配电接口复杂[11-12]。供配电接口包括内部供电接口、各器间供电接口、器箭供电接口、器地供电接口等。由于多器组合体航天器存在器器分离、交会对接等过程,供电、信息、测试接口多,同时受探测器质量制约,给舱段间、器箭、器地电接口设计带来较大的困难。
3)质量约束严苛[11-14]。深空探测器受运载能力制约质量要求严苛,其中可见报道的“奥德赛”火星探测器供配电系统质量在整个探测器中的占比为11.9%,嫦娥一号、二号探测器质量占比9.9%,嫦娥三号、四号探测器质量占比4%;嫦娥五号相比探月二期任务,新增了月面采样、起飞、月球轨道交会对接、月地转移和再入回收等多个关键环节,任务复杂程度大大增加,供配电系统质量占比指标进一步降低为3.9%,现有技术无法满足任务需求,必须从系统构架和单机设计两方面开展优化设计和减重工作,提高探测器的能源利用率。
本文结合嫦娥五号探测器主要任务特点,概述了多器供配电系统的功能需求、多器联合供电方案设计,重点介绍了能量平衡仿真分析、多母线融合控制、集成化功率调节与配电单元设计、蓄电池组在轨保护、故障诊断与处置和容量实时评估技术4种关键技术,并给出了地面和在轨验证结果。
1 多器组合一体化供配电系统设计方案
1.1 功能要求和性能需求
供配电系统需具备功能如下,性能指标见表1。
1)满足探测器在轨飞行过程中的一次电源供电和配电需求;
2)轨道器与着陆器之间具有双向并网供电能力;
3)上升器与着陆器分离前,两器联合供电;分离后上升器独立供电;
4)返回器与轨道器分离前接收轨道器供电并具有并网供电能力,分离后返回器独立供电至着陆后48 h;
5)为探测器提供指令电源,为探测器火工品提供起爆控制,为各分离面电连接器提供电分离控制。

表1 探测器供配电系统主要技术指标Table 1 Main technical parameters of detectorpower supply and distribution

续表1
1.2 多器组合供配电方案设计
1.2.1多器组合式供配电拓扑设计
综合考虑整器负载功率需求、质量限制和太阳电池发电利用率,除返回器采用单母线供电体制外,轨道器、着陆器和上升器均采用全调节和不调节双母线供电体制,探测器供配电方案的结构框图如图1所示[13-18]。

图1 探测器供配电结构框图Fig.1 Block diagram of structure of power supply and distribution
轨返组合体和着陆上升组合体之间采用隔离并网供电方式,实现双向供电和功率地隔离[14-15,19];轨道器与返回器采用单向供电方式。轨道器配置一组120 Ah锂离子蓄电池组,返回器配置一组40 Ah锌-氧化银电池组(一次性电池组)。在轨返组合体联合飞行期间,轨道器通过器间分离电连接器为返回器内部负载设备长期供电,在轨返组合体分离前,通过切换开关转为返回器自带锌-氧化银电池组供电。着陆上升组合体采用联合供电设计,复用一组锂离子蓄电池组和放电调节器(Battery discharge regulator,BDR)。锂离子蓄电池组容量80 Ah,位于上升器内,同时满足舱段组合飞行和独立飞行时的供电需求,极大程度减少了对整器质量资源的占用。
着陆器、上升器均选择太阳电池阵-蓄电池组联合供电方案,着陆器与上升器复用一组锂离子蓄电池组。着陆器与上升器分离前,上升器太阳电池阵一直处于收拢状态,着陆器太阳电池阵和上升器蓄电池组组成联合电源,在着陆下降前由着陆器太阳电池阵给蓄电池组充电,以满足动力下降段的大负载能源需求;月面工作段,单侧上升器太阳电池阵外板受照,着陆器太阳电池阵、上升器太阳电池阵和上升器蓄电池组组成联合电源,以满足着上组合体月面采样和上升器月面起飞前的能源需求;着陆器与上升器分离后,着陆器无储能装置。上升器入轨后,展开太阳电池阵,上升器太阳电池阵和上升器蓄电池组组成联合电源,以满足交会对接段的能源需求。
1.2.2多器组合式航天器接地设计
嫦娥五号在任务过程中包括多次器-器分离过程以及一次月球轨道交会对接过程,接口关系复杂,使得探测器在接地设计中与常规航天器相比,具有以下特点:在探测器系统接地设计时既要满足单器飞行(如上升器月面起飞后至交会对接前、返回器轨返分离后至落地)时单点接地要求,也要满足多器组合飞行阶段(如四器联合飞行、轨返组合体联合飞行、着上组合体联合飞行)单点接地要求。为了确保航天器零电平基准,系统设计了一种开关与电阻并联的接地状态柔性切换电路,通过对不同舱段开关分时控制,实现多器组合工作状态和独立工作状态单点接地。
探测器系统一次电源接地设计如图2所示。轨道器在数据接口单元(Data interface unit, DIU)设置轨道器单点接地点,着陆器在功率调节与配电单元(Power control distribution unit,PCDU)设置着陆器单点接地点,上升器在PCDU设置上升器单点接地点,返回器在配电控制单元设置返回器单点接地点;在四器组合体飞行阶段,轨返组合体在轨道器内采用单点接地,着上组合体在着陆器内采用单点接地;着陆器与上升器分离后,将上升器接地开关接通,上升器一次电源回线在PCDU单点接地;轨道器与返回器分离后,将返回器接地开关接通,返回器一次电源回线在配电控制单元单点接地。

图2 探测器一次电源接地设计Fig.2 Power supply grounding design of the probe
1.2.3交会对接静电释放设计
轨返组合体与着上组合体分离后,上升器与轨返组合体所经历的空间环境不同,由于表面带电效应,使得上升器结构与轨返组合体结构之间的电位不一致。如果上升器与轨返组合体之间直接进行对接,两器之间电势差会导致交会对接机构通过较大的电流,从而使上升器和轨返组合体“零”电位发生波动,影响航天器飞行安全。
为了避免对接过程中大电流放电导致“零”电位波动,采用了被动放电措施,具体方法如图3所示。通过10~20 kΩ电阻接轨道器结构,将交会对接机构与轨道器结构绝缘安装。在交会对接时,上升器与轨返组合体所带的电荷经过电阻流到上升器和轨道器结构,大大降低瞬间接触引起的电压波动,提高探测器的安全性。
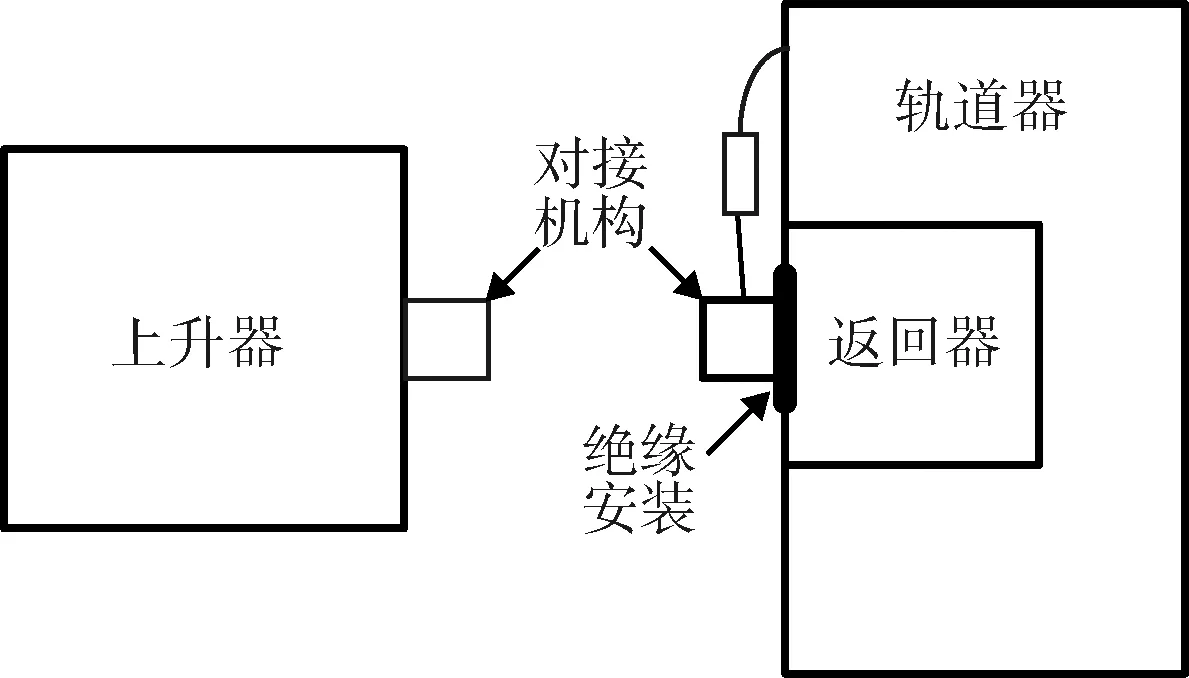
图3 交会对接器间静电释放设计Fig.3 Design of electrostatic discharge for spacecraft rendezvous and docking
2 主要关键技术
2.1 能量平衡仿真分析
探测器在轨经历11个飞行阶段,根据光照条件和负载功率需求可知,着上组合体动力下降段和轨返组合体与上升器交会对接段能源最紧张。动力下降段为确保着陆器太阳电池阵能够承受落月冲击载荷,需在落月前将太阳电池阵收拢。同时,控制系统的落月敏感器开机,推力器短期功率增大,着上组合体在内电状态下放电电量大;交会对接段轨返组合体和上升器的姿态为对月定向,光照期太阳电池阵均无法实现对日正照,探测器本体对太阳电池阵形成遮挡,同时控制系统的对接敏感器开机,蓄电池组放电深度大。因此,需要建立精确的供配电链路模型,并对全任务阶段探测器能量平衡情况进行分析,以验证系统方案的正确性。
供配电链路模型主要包括太阳电池电路、锂离子蓄电池组、电源控制器和负载建模,此外还需要将轨道光照条件、在轨飞行程序作为输入。
嫦娥五号太阳电池电路均采用能量转化效率较高的三结砷化镓电池,将其等效为电流源,则其产生的电流由下面的公式确定:
(1)
(2)
式中:Iph为光生电流;Is1为扩散机制饱和电流;Is2为空隙层饱和电流;Is3为扩散机制饱和电流;Rs为串联内阻;Rsh为并联内阻;A为等效二极管质量因子;K为波耳兹曼常数(K=1.38×10-23J/K);I和V分别为端口电流和端口电压;Isc为参考温度和光照下的光生电流;G为光照强度;G0为参考光照强度;CT为温度变换系数;T和Tref分别为温度和参考温度。
锂离子蓄电池组采用二阶线性化电路模型进行建模,由等效电压源、等效内阻、RC电路和自放电电阻组成,另外根据蓄电池组的充放电情况实时计算其容量、充放电循环次数等表征电池当前状态的物理量,如图4所示。其中,电阻R1和电容C1并联的组合可以反映电池的动态特性;电阻R2可以反映电池组的阻性;电动势E反映电池的平缓放电平台;输出端并联电阻R3来反映电池组自放电特性;温度对电池性能的影响,可通过电阻和电容值与温度的关系来反映。
电源控制器模型包含顺序开关分流串联调节器(Sequential switching shunt series regulator,S4R)、顺序开关分流调节器(Sequential switching shunt regulator,S3R)、母线滤波器、BDR、主误差放大器(Main error amplifier,MEA)、蓄电池组误差放大器(Battery error amplifier,BEA)等,均采用简化的电路模型,以提高仿真效率,负载采用恒功率型负载。
以着上组合体为例,构建的能量平衡仿真模型如图5所示。模型的输入参数见表2,包括时间、全调节和不调节母线太阳电池阵输出电流和负载功率、太阳电池阵入射角系数、光照遮挡系数。
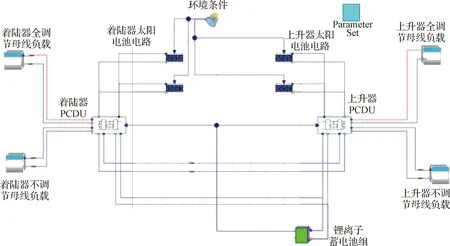
图5 着上组合体能量平衡仿真模型Fig.5 Energy balance simulation model of lander and ascender combination

表2 能量平衡仿真模型输入参数Table 2 Input parameters of energy balance simulation model
经仿真分析,着上组合体动力下降段和上升器交会对接近程段能量平衡分析结果如图6所示,最大放电深度达83%,出现在交会对接近程段结束时刻,能源满足任务需求。
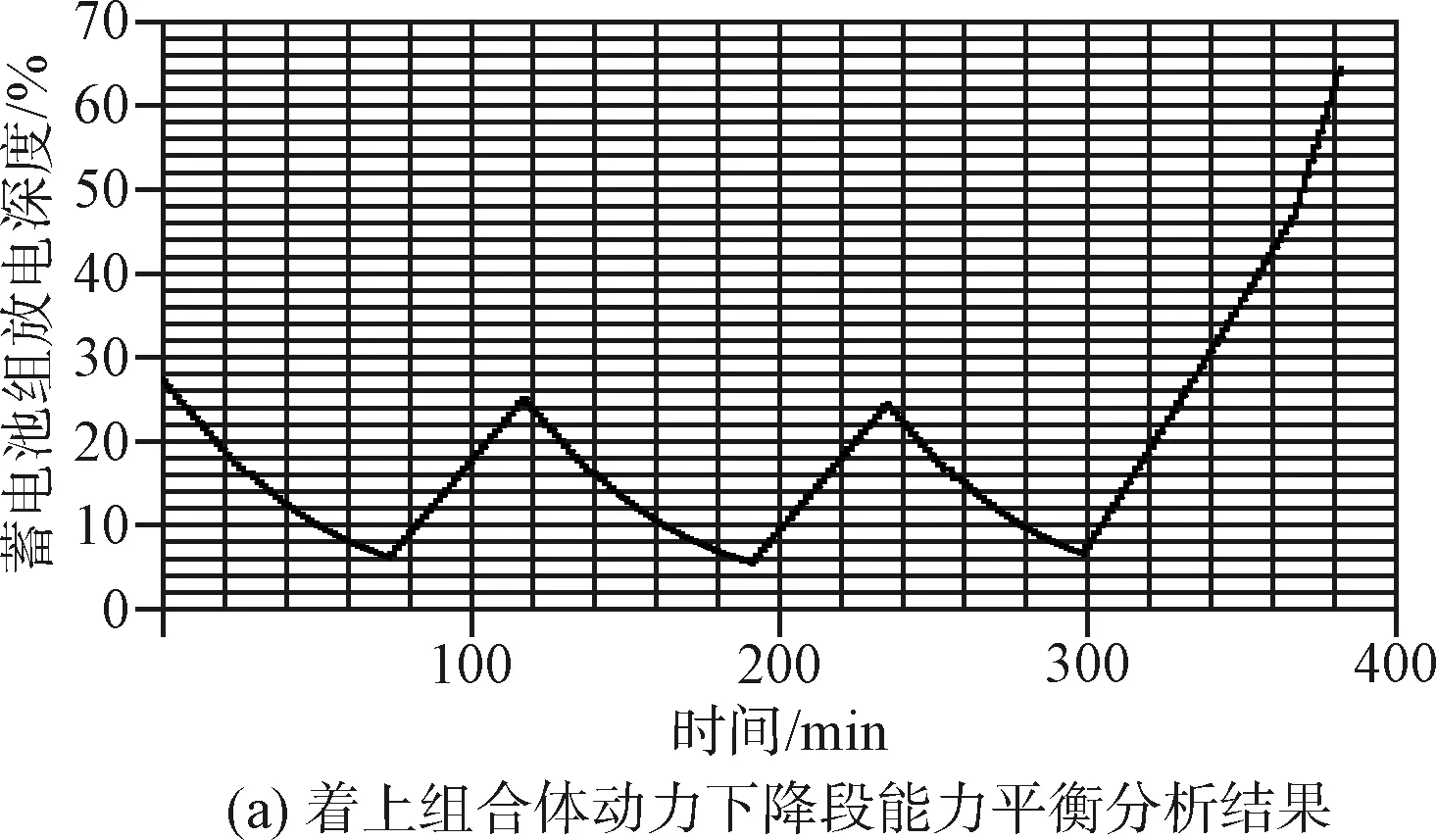
图6 能量平衡分析Fig.6 Energy balance simulation results
2.2 多母线融合控制技术
为了尽可能地提高太阳电池阵发电利用率,减少总量占用,根据双母线负载功率需求,采用S4R电路和S3R电路相结合的方式进行探测器供电,如图7所示。4路S4R电路输出既与全调节母线相连,又与不调节母线相连,优先为全调节母线负载供电,在满足全调节母线供电需求的前提下,为不调节母线负载供电的同时也为蓄电池供电,若太阳电池阵仍有剩余能量,则进行对地分流;6路S3R充电分流电路输出仅与不调节母线相连,为不调节母线负载供电的同时也为蓄电池充电,在满足不调节母线用电需求的前提下,若太阳电池阵仍有剩余能量,则进行对地分流。
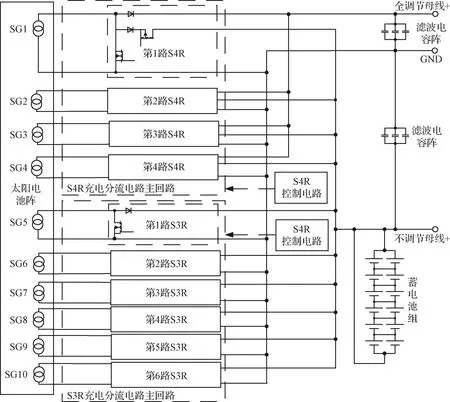
图7 双母线融合控制原理图Fig.7 Schematic diagram of double-bus syncretic control
为了避免全调节母线和不调节母线负载同时用电对S4R电路的竞争和干扰,S4R电路和S3R采用逆向分流法,即当S4R电路为全调节母线供电时,分流顺序为第4路至第1路;当S4R电路为不调节母线供电时,分流顺序为第1路至第4路,在第4路分流后再对S3R电路的1~6路依次开始分流。这种方式在保证S4R电路优先为全调节母线供电的同时提高了太阳电池阵发电的利用率。
S4R控制电路包括全调节母线/不调节母线电压取样电路、充电调节控制电路、分流调节控制电路、MEA电路、BEA电路和驱动电路等。全调节/不调节母线电压采样值与目标值做差后经放大电路处理形成3路误差信号,采用3取2表决电路得到MEA/BEA信号,一方面送入S4R控制逻辑电路实现全调节母线优先供电控制,另一方面送入驱动电路与每路分阵分流基准值进行比较,通过对分流基准值进行设定即可控制每路分阵的调节顺序。其中,S4R控制逻辑电路如图8所示。
2.3 集成化功率调节与配电单元设计
嫦娥五号供配电系统具备功率调节、配电、火工品起爆、电分离控制和通信等功能,若按照传统卫星的配置方式研制多台单机,设备间接口繁多、质量资源占用大,无法满足任务需求。采用集成化和轻小型化设计思路,将功率调节模块(Power control unit,PCU)、配电和火工品控制模块(Power distribution unit,PDU)与智能接口模块(Intelligent interface unit,PIU)集成为一台产品,如图9所示。PCU实现在光照期对太阳电池阵的调节和在阴影期对蓄电池组放电调节;PDU实现对全调节、不调节母线负载的通断电控制,火工品起爆和分离电连接器电分离控制;PIU采用主备机冷备份设计,实现遥控指令接收、遥测信号采集,为蓄电池组在轨保护、故障诊断与处置和容量实时评估提供软件支持。同时,单机研制时通过模块化设计、机箱选用轻质高强度铝镁合金材料、采用汇流条、霍尔元件与印制电路板的一体化设计等方法,进一步节约质量资源。
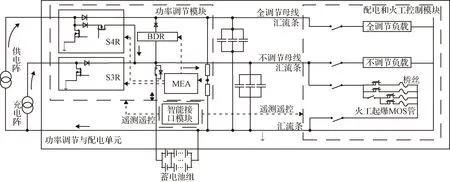
图9 集成化功率调节与配电单元设计原理图Fig.9 Design schematic diagram of integrated power regulation and distribution unit
集成化和轻小型化设计大大减少了结构、器件和电缆等质量,同时简化了系统内部接口复杂程度,提高了探测器供电可靠性。
2.4 蓄电池组在轨保护、故障诊断与处置和容量实时评估技术
受质量资源限制,嫦娥五号轨道器和上升器均采用一块高比能量锂离子蓄电池组(177.1 Wh/kg)作为储能单元,上升器锂离子蓄电池组在着上组合体模式下与着陆器复用,因而蓄电池组的工作状态直接影响探测器的任务实施。在轨使用时,需避免锂离子蓄电池组发生过充电和过放电,过充和过放会导致锂电池内部形成锂枝晶,刺穿隔膜,造成内阻短路,最终导致蓄电池组失效,对蓄电池组的电性能和循环寿命极为不利[17-18]。
为了有效延长锂离子蓄电池组的使用寿命,提高供配电系统的可靠性,需要制定蓄电池组在轨保护、故障诊断与处置策略,实现对电池组的过充过放保护,同时对蓄电池荷电状态进行实时评估,为后续飞控任务的制定和推演提供支撑。针对探测器舱段组合体状态多变、设备集成化程度高、在轨飞行程序及弧段复杂等特点,设计了蓄电池组充电切换控制、过放保护及恢复控制和容量实时评估策略:
1)充电切换控制:由PIU采取软件控制的方式实现两舱段复用锂离子蓄电池组的充电电压自主切换控制。在轨过程中,通过下位机自主检测锂离子蓄电池单体和组电压,并与预设的单体电池电压阈值相比较,当某节单体电池出现失效时,通过自主调整充电终压点电压阈值的方法,实现各舱段给蓄电池组充电终压的自动切换控制,控制流程如图10所示。

图10 蓄电池组在轨充电切换控制流程图Fig.10 On-orbit charging switching control flow diagram of storage battery
2)过放保护及恢复控制:由PIU采用软件控制的方式实现两舱段复用锂离子蓄电池组的过放保护和自主恢复供电控制。在轨过程中,通过下位机自主检测蓄电池组电压和单体电压,并与预设的过放阈值相比较,采取不同舱段分级断电保护控制;当整器再次上电后,通过预设过放恢复电压阈值,自主接通放电开关,从而恢复供电。
3)容量实时评估:由PIU通过安时计的方式实现两舱段复用锂离子蓄电池组设计形态下的蓄电池电量精细化计算。在轨过程中,通过连续采集、处理舱段内、舱段间蓄电池组的充电电流与放电电流,并根据充电电流、放电电流实时计算蓄电池组产生的充电电量值与放电电量值以及当前蓄电池组剩余电量值,实现多器复杂航天器能源系统的精细化计算和管理。
上述3种策略提升了探测器供配电系统的自主管理能力,有效防止在轨一节单体故障情况下锂离子蓄电池组过充电,实现了蓄电池组过放保护和自主恢复供电控制,提升了多器航天器蓄电池组在轨状态的精细化评估和管理能力,延长了锂离子蓄电池的使用寿命,从而大大提高了探测器供配电系统的可靠性。
3 试验验证
3.1 多器供电模式验证
在单机测试、系统联合测试和整器AIT测试过程中,均对探测器各舱段供电模式的可靠性、安全性进行了测试和验证,相关遥测曲线如图11所示。在上升器单器和着上组合体模式下,通过控制地面方阵功率的输出和禁止,模拟在轨探测器进出阴影区,从遥测曲线可以看出,进出阴影期间蓄电池组转内电和充放电功能正常;在轨返组合体模式下,返回器转内电开关闭合前,轨道器为返回器供电,母线电压稳定,返回器转内电开关闭合后,返回器锌氧化银蓄电池组接入放电,轨道器全调节母线电流略有降低,两器联合为返回器负载供电;在四器组合体模式下,轨道器并网供电单元启动后,并网供电单元输出电压和电流正常。单器和多器组合状态下,供电模式测试结果与设计状态一致。

3.2 太阳电池阵展开、光照试验
为验证探测器太阳电池电路供电通路状态,地面测试阶段太阳电池阵开展了展开、光照试验。在地面灯阵开启后,太阳电池阵输出电流由0 A增大到3 A,电池电路供电通路正常。太阳电池阵地光照试验遥测曲线如图12所示。

图12 太阳电池阵地面光照试验遥测曲线Fig.12 Telemetry curve of solar array light ground test
3.3 火工品起爆控制功能验证
为验证PCDU火工品起爆控制功能,地面测试阶段在桥丝输出端连接火工品等效器,模拟火工品起爆瞬间产生的电流。该瞬态电流经霍尔传感器采样并转化为电压信号被采样保持电路捕获,测试过程中起爆电流的遥测变化与设计状态一致(见图13和图14)。
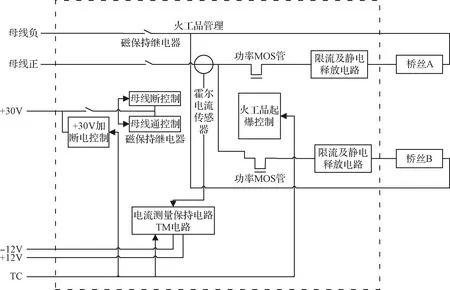
图13 火工品起爆控制原理图Fig.13 Schematic diagram of explosive ignition control
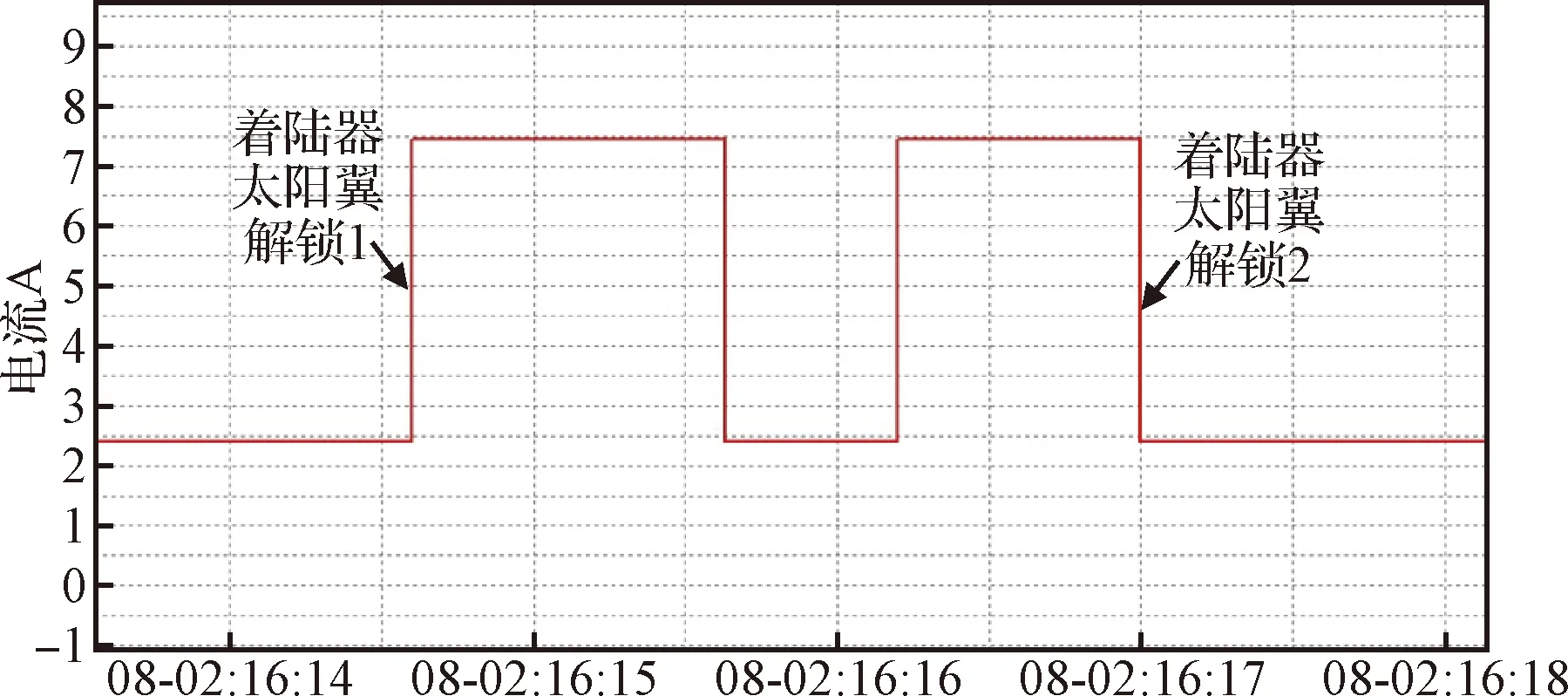
图14 火工品起爆控制功能测试遥测曲线Fig.14 Telemetry curve of explosive ignition control function test
4 在轨飞行验证
在嫦娥五号飞行任务过程中,供配电系统工作正常,性能指标均满足要求,圆满完成了整个飞行阶段和地面回收供配电任务。
探测器在轨飞行过程中,太阳电池阵的发电功率相比指标有不低于5%的裕度。以近月制动段着陆器太阳电池阵输出电流为例,在轨实测总输出电流52.82 A,相比设计值46.53 A具有一定裕度,如图15所示。
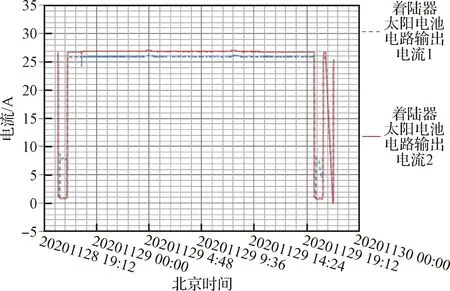
图15 近月制动段着陆器太阳电池的输出电流Fig.15 The output current of lander solar battery during the near-moon braking section
蓄电池组的放电深度变化趋势与能量平衡分析一致,以地月转移段上升器锂离子蓄电池组放电深度为例,能量平衡仿真曲线和在轨遥测曲线对比情况如图16、图17所示。由于在轨工作时负载功率小于预期值,调姿过程中光照条件优于分析值,导致实际放电深度比能量平衡分析值小。
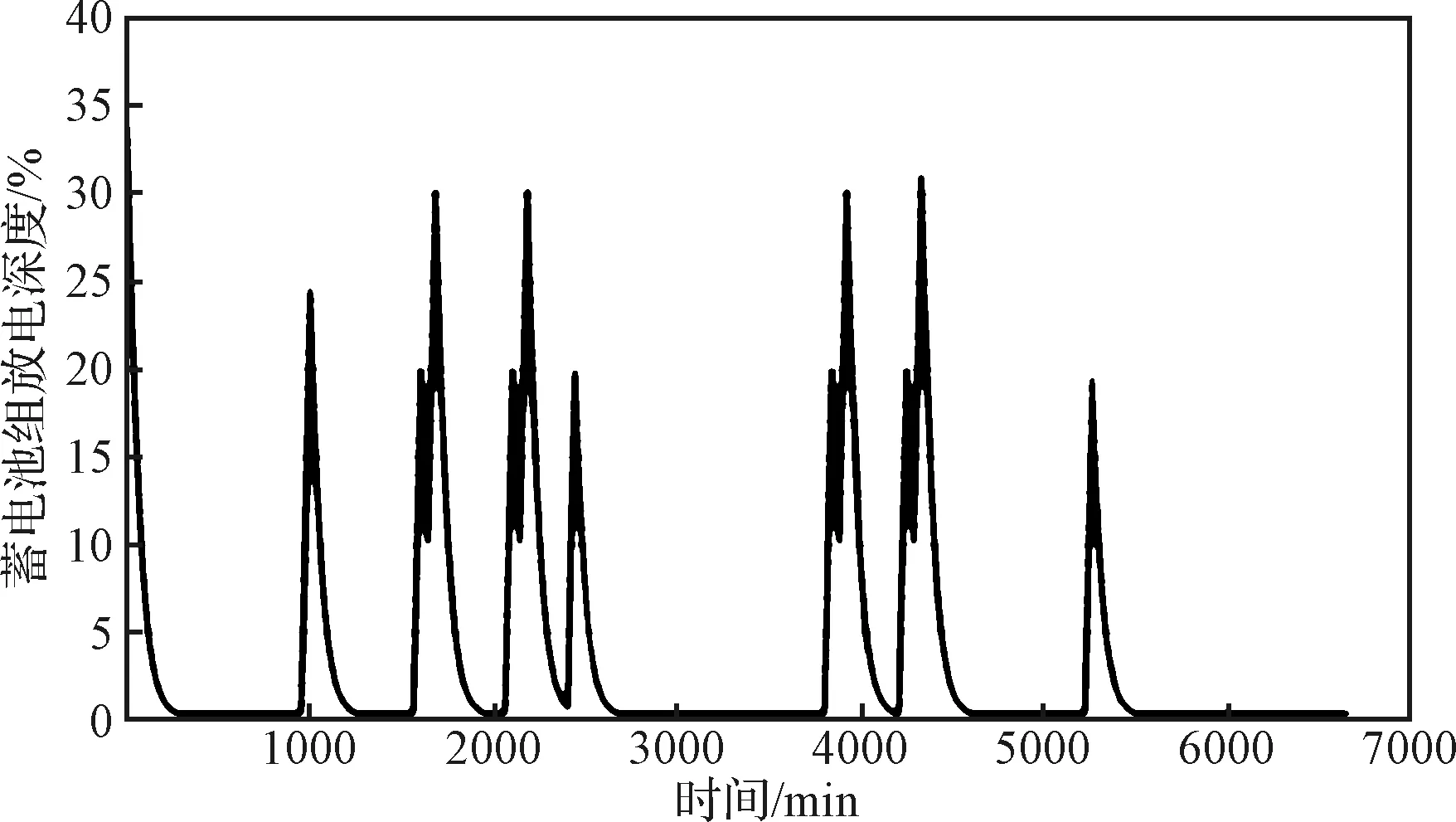
图16 地月转移段锂离子蓄电池组能量平衡仿真曲线Fig.16 Simulation curve of energy balance of Lithium-ion storage battery during the earth-moon transition
5 结 论
嫦娥五号探测器供配电系统实现了多器组合一体化供配电方案设计、多器组合式航天器接地设计、交会对接静电释放设计、能量平衡仿真分析、多母线融合控制、PCDU功能集成化设计以及蓄电池组在轨保护与容量实时评估等关键技术的突破。探测器供配电系统在轨工作正常、可靠,圆满完成了中国首次月面无人自动采样返回任务。多器组合一体化供配电系统的在轨成功验证,为后续探月四期等复杂的探月工程及深空探测任务提供了良好的技术支撑,奠定了坚实的技术基础。
