逆金字塔式安全着陆点选择方法
2021-10-19陈丽平陈春亮李铁映刘加明
陈丽平,顾 征,陈春亮,李铁映,王 彤,曹 宇,刘加明
(北京空间飞行器总体设计部,北京 100094)
0 引 言
地外天体软着陆探测是一种就位探测方式,相比于遥感探测[1-2],可以获得更精细、更深入的探测成果,是人类开展地外天体科学研究和开发利用地外天体资源的重要手段[3]。着陆点的选择是地外天体软着陆探测任务首要任务[4],关系着科学回报和工程可实现性[5-6],其中地形安全性是需要考虑的关键因素之一[7]。
现有安全着陆点选择的研究工作主要分为两类:一类为飞行过程中的在线选择,在着陆下降过程中利用敏感器在轨获取的高精度地形数据,并设计自主避障算法在线实时检测陨石坑、陡坡、石块等威胁着陆安全的障碍物以精选无障碍区域作为着陆区[8]。Johnson等[9]首次提出了一种基于激光雷达的障碍检测方法,在此基础上,后续学者提出了随机过程[10]、IKOSE[11]等大量基于激光雷达数据的障碍检测与规避算法;在基于图像数据的障碍检测研究方面,Yang等采用Canny算子实现了陨石坑边缘检测[12],Burl等提出了基于边缘梯度特征的岩石检测算法[13],崔平远团队提出了基于图像灰度形态学的实时障碍检测方法[14]和基于帧间单应矩阵的坡度验证方法[15],并首次建立了考虑地形安全性、燃料消耗和触地能力的加权综合着陆点选择准则[16];丁萌等[17]采用基于区域生长的方法实现了陨石坑检测;嫦娥三号设计了基于平面图像亮度差异特征的岩石及陨石坑检测算法,用于识别大障碍,选择相对平坦的着陆区,并设计了基于三维立体图像的坡度障碍识别算法,用于获取坡度数据,精选着陆点,最终采用粗避障和精避障相结合的方式在轨实现了探测器安全着陆[18]。由于着陆下降过程通常时间短、距离天体表面近、敏感器的观测范围有限,在线着陆点选择方法严重依赖于探测器所处位置的地形分布,可能选择不出完全满足要求的着陆点,只能选择出相对安全的着陆区[19],且可能不是较大范围预选着陆区的最优着陆区;另一类为飞行前的离线选择,通过对已有地形数据进行形貌特征提取与分析[20-21],以选取较为平坦的区域作为标称着陆区,从而提高着陆安全性,同时指导轨道设计及轨控策略制定。凤凰号在研制阶段充分分析了岩石及斜坡等障碍引起的着陆风险概率分布情况,选择的着陆椭圆位置以最大程度确保安全着陆的可能性[22];嫦娥三号及嫦娥四号探测器在研制阶段对预选着陆区的陨石坑、石块和斜坡等地形特征进行了详细的分布统计分析,为了确保着陆安全,最后选择了具有较大面积平坦区域作为着陆区[23]。现有离线着陆点选择方法主要针对地形特征开展了统计与分布的定性分析,没有紧密结合探测器的软着陆能力进行定量分析与评估,筛选出的区域比较宏观,缺乏对地形安全性的定量评估。
为了克服现有安全着陆点选择方法的不足,一方面能够紧密结合探测器的软着陆能力,另一方面能够对大范围的预选着陆区进行定量分析与评估,本文设计了逆金字塔式安全着陆点选择方法,结合着陆器的落点精度和自主避障及地形坡度适应能力,建立了基于平整点、安全着陆点、可靠避障点和标称着陆点的地形安全性分析与定量搜索模型,该模型呈四层逆金字塔结构,每一层搜索的结果作为下一层搜索的输入,从弱约束到强约束逐步收敛,并采用该模型对预选着陆区的地形进行了定量分析与评估,快速精选出了与探测器着陆能力相匹配的安全着陆区及标称着陆点,最后给出了嫦娥五号探测器安全着陆点选择过程和在轨飞行结果。
1 逆金字塔地形分析模型
与以往方法不同,逆金字塔式安全着陆点选择方法以探测器的软着陆能力为设计输入,获取与探测器能力高度契合的安全着陆点,因此首先对探测器的软着陆能力进行分析,在此基础上对地形分析模型进行具体设计。
1.1 探测器软着陆能力
探测器的软着陆能力指探测器对地外天体地形的适应能力,以嫦娥五号探测器为例进行分析。通过动力下降过程打靶仿真可知嫦娥五号探测器月面着陆落点误差范围约为15 km×6 km(长轴为航迹方向,短轴为垂直航迹方向)。嫦娥五号探测器着陆下降过程示意图如图1所示,其中接近段、悬停段、避障段和缓速下降段组成了接力自主避障过程。接近段通过光学敏感器成像检测大障碍,在粗避障区约282 m×176 m的矩形区域内(长轴为航迹方向,短轴为垂直航迹方向)经粗避障自主选择一个约100 m×100 m的方形精避障区;悬停段保持着上组合体处于悬停状态,通过三维成像敏感器对精避障区进行精障碍检测,自主选取着陆点;避障段着上组合体下降至所选着陆点上方约30 m。缓速下降段着上组合体下降至一定高度后,关闭发动机和推力器,垂直下降至月面,着陆缓冲机构要求地形坡度不应超过8°。
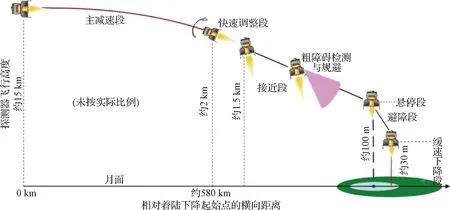
图1 嫦娥五号探测器着陆下降过程Fig.1 Chang’e-5 landing descent process
由以上分析可知,嫦娥五号探测器的月面软着陆能力可概括如下:月面着陆落点误差范围约为15 km×6 km,在粗避障区域约为282 m×176 m矩形区域内,经粗避障可自主选择一个100 m×100 m方形精避障区,并可在此方形区域内通过精避障自主选择着陆点完成垂直月面着陆,要求着陆点的地形坡度不应超过8°。
1.2 地形分析模型
根据软着陆能力的分析结果可知,探测器的软着陆能力主要包括落点精度、自主避障能力和地形坡度适应能力三方面,据此为确保实现安全可靠着陆,对安全着陆区地形量化要求如下:
1)着陆区的面积需大于a×b,其中a为沿航迹方向长度,b为沿垂直航迹方向长度;
2)着陆区内任意一块约x×y矩形区域均可作为粗避障区,x为沿航迹方向长度,y为沿垂直航迹方向长度;
3)着陆区内任意一块约x×y矩形区域内应至少包含1个v×v的方形精避障区,v为方形区域边长,此区域内至少包含1个地形坡度不超过θ度的可着陆点。
安全着陆区地形量化要求包含了面积、粗避障区、精避障区和可着陆点等由粗到细的四层约束,各层约束的关系如图2所示,呈逐层包含关系,粗约束包含细约束。
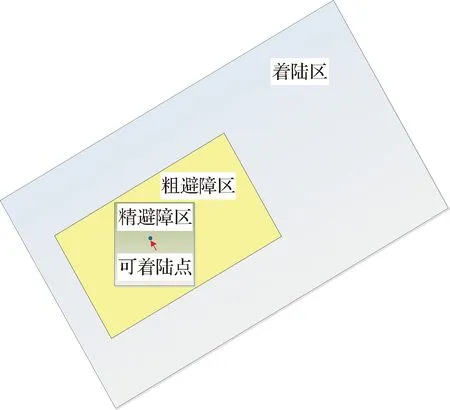
图2 安全着陆区量化要求四层约束关系示意图Fig.2 Four layer relationship diagram of quantitative requirements for safe landing area
由图2可知,安全着陆区地形量化要求的每一级约束均为上一级约束的必要条件,因此地形分析时必须先得到下一级约束的地形分析结果,才能开展本级约束下的地形分析,基于此建立逆金字塔式地形安全性分析与定量搜索模型,如图3所示,该模型包含平整点、安全着陆点、可靠避障点和标称着陆点四层结构,各层结构具体定义如下:
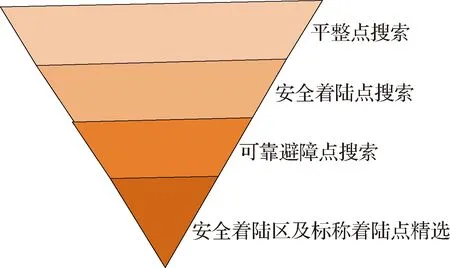
图3 逆金字塔式地形安全性分析与定量搜索模型Fig.3 Terrain safety analysis and quantitative search model based on inverse pyramid
1)平整点:地形坡度不超过θ度的地形像素点,若某个地形像素点(中心点)与其邻域8个地形像素点(邻点)高程差小于ptan(θ),且与其间隔一个地形像素点的周围邻域16个地形像素点(间隔点)的高程差小于2ptan(θ),其中p为预选着陆区数字高程图(Digital elevation map,DEM)的像素分辨率,如图4所示,则认为该点为平整点。
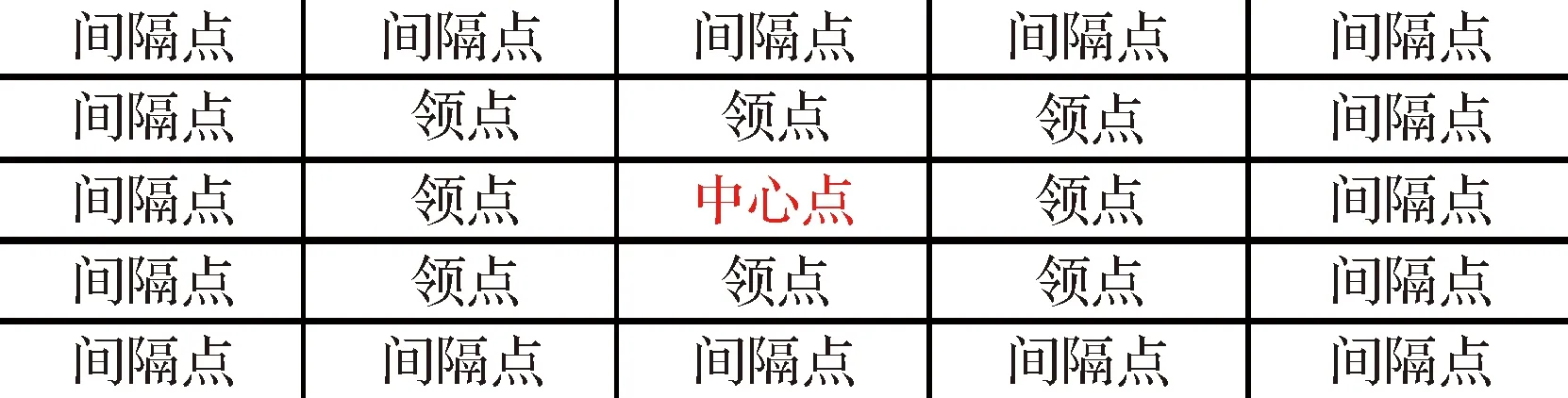
图4 平整点计算示意图Fig.4 Calculation diagram of leveling point
平整点与其邻点及间隔点的高程关系满足:
(1)
根据定义可知,预选着陆区中任意地形像素点与其邻点及间隔点均满足式(1)时为平整点,计算公式如下:


(2)
式中:L为预选着陆区DEM中所有像素的平整点标识矩阵,L(i,j)为(i,j)的平整点标识,当(i,j)与其8个邻点及16个间隔点的高程差均满足式(1)时值为1,否则为0;m,n取值均为0时,δmn值为0,dmn为1,(i,j)与其自身的地形高程关系始终满足式(1),为简化表示,因此也参与计算。
2)安全着陆点:若以某个地形像素点为中心的v×v方形范围内均为平整点,则定义该像素点为安全着陆点,计算公式如下:

(3)
式中:[]表示四舍五入取整运算;S为预选着陆区DEM中所有像素的安全着陆点标识矩阵;S(i,j)为(i,j)的安全着陆点标识,以L为计算输入,以(i,j)为中心的v×v方形范围内所有像素的平整点标识均为1时该值为1,否则为0;m,n取值为[-[v/(2p)],[v/(2p)]]的整数,取不同值组合,L(i+m,j+n)可表示以(i,j)为中心的v×v方形范围内所有像素的平整点标识。
3)可靠避障点:若以某个地形像素点为中心的x×y矩形范围内(长轴为沿航迹方向,短轴为沿垂直航迹方向)至少包含一个安全着陆点,则定义该像素点为可靠避障点,计算公式如下:
(4)
式中:W为预选着陆区DEM中所有像素的可靠避障点标识矩阵,W(i,j)为(i,j)的可靠避障点标识,以S为计算输入,以(i,j)为中心且斜角为σ度的x×y矩形范围内至少有1个像素的安全着陆点标识为1时该值为1,否则为0,σ为航迹与预选着陆区DEM中纬度线的夹角;S′为预选着陆区DEM的坐标系逆时针旋转σ度后新坐标系下的安全着陆点标识矩阵,(i′,j′)表示新坐标系下预选着陆区DEM的第i′行,第j′列像素点,m′,n′取值分别为[-[x/(2p′)],[x/(2p′)]],[-[y/(2p′)],[y/(2p′)]]的整数,取不同值组合,S′(i′+m′,j′+n′)可表示以(i′,j′)为中心且斜角为σ度的x×y矩形范围内所有像素的安全着陆点标识,p′为预选着陆区DEM在新坐标系下的分辨率,p′等于p/cosσ, (i′,j′)与(i,j)描述同一个像素点时,满足:
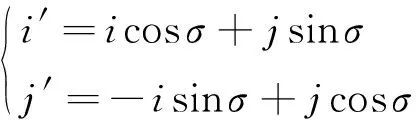
(5)
式(4)中(m,n)和(i′+m′,j′+n′)分别在S和S′的坐标系下描述相同的像素点,因此S′(i′+m′,j′+n′)等于S(m,n), (m,n)和(i′+m′,j′+n′)的转换关系如下:

(6)
4)标称着陆点:当一个面积不小于a×b矩形范围内(长轴为沿航迹方向,短轴为沿垂直航迹方向)的所有地形像素点(100%)均为可靠避障点,则定义该区域为安全着陆区,安全着陆区的中心点定义为标称着陆点,计算公式如下:
(7)
式中:B为预选着陆区DEM中所有像素的标称着陆点标识矩阵,以W为计算输入,当以(i,j)为中心且斜角为σ的a×b矩形范围内所有像素的可靠避障点标识均为1时该值为1,否则为0,σ为航迹与预选着陆区DEM中纬度线的夹角;W′为预选着陆区DEM的坐标系逆时针旋转σ度后新坐标系下的可靠避障点标识矩阵,m′、n′取值分别为[-[a/(2p′)],[a/(2p′)]]、[-[b/(2p′)],[b/(2p′)]]的整数,取不同值组合,W′(i′+m′,j′+n′)可表示以(i′,j′)为中心且斜角为σ的a×b矩形范围内所有像素的可靠避障点标识,与式(4)同理,W′(i′+m′,j′+n′)等于W(m,n),(i′,j′)和(i′+m′,j′+n′)分别满足式(5)和式(6)。
由以上定义可知,逆金字塔式地形安全性分析与定量搜索模型每一层搜索的结果作为下一层搜索的输入,从弱约束到强约束逐步收敛,每一层搜索均为线性运算,计算速度快,能够对大范围的预选着陆区进行快速遍历搜索,精选出与探测器着陆能力相匹配的安全着陆区及标称着陆点。
2 安全着陆点选择算法
嫦娥五号探测器着陆能力的具体参数取值见表1。

表1 嫦娥五号探测器着陆能力参数取值Table 1 Values of the landing capability parameters of Chang’e-5
逆金字塔式地形安全性分析与定量搜索模型对地形分析的顺序为平整点、安全着陆点、可靠避障点和标称着陆点,在嫦娥五号探测器安全着陆点选择实践过程的具体实施步骤如下:
1)搜索平整点
采用式(2)对预选着陆区DEM的所有像素点进行平整度评估,获得预选着陆区域的所有平整点。
2)搜索安全着陆点
以100 m×100 m方形区域作为滑动窗口,采用式(3)对预选着陆区DEM的所有像素进行逐点评估,获得预选着陆区内的所有安全着陆点。
3)搜索可靠避障点
以282 m×176 m斜矩形区域(长轴为沿航迹方向,短轴为沿垂直航迹方向)作为滑动窗口,斜角为航迹与预选着陆区DEM中纬度线夹角,如图5所示,采用式(4)对预选着陆区DEM的所有像素进行逐点评估,获得预选着陆区内的所有可靠避障点。
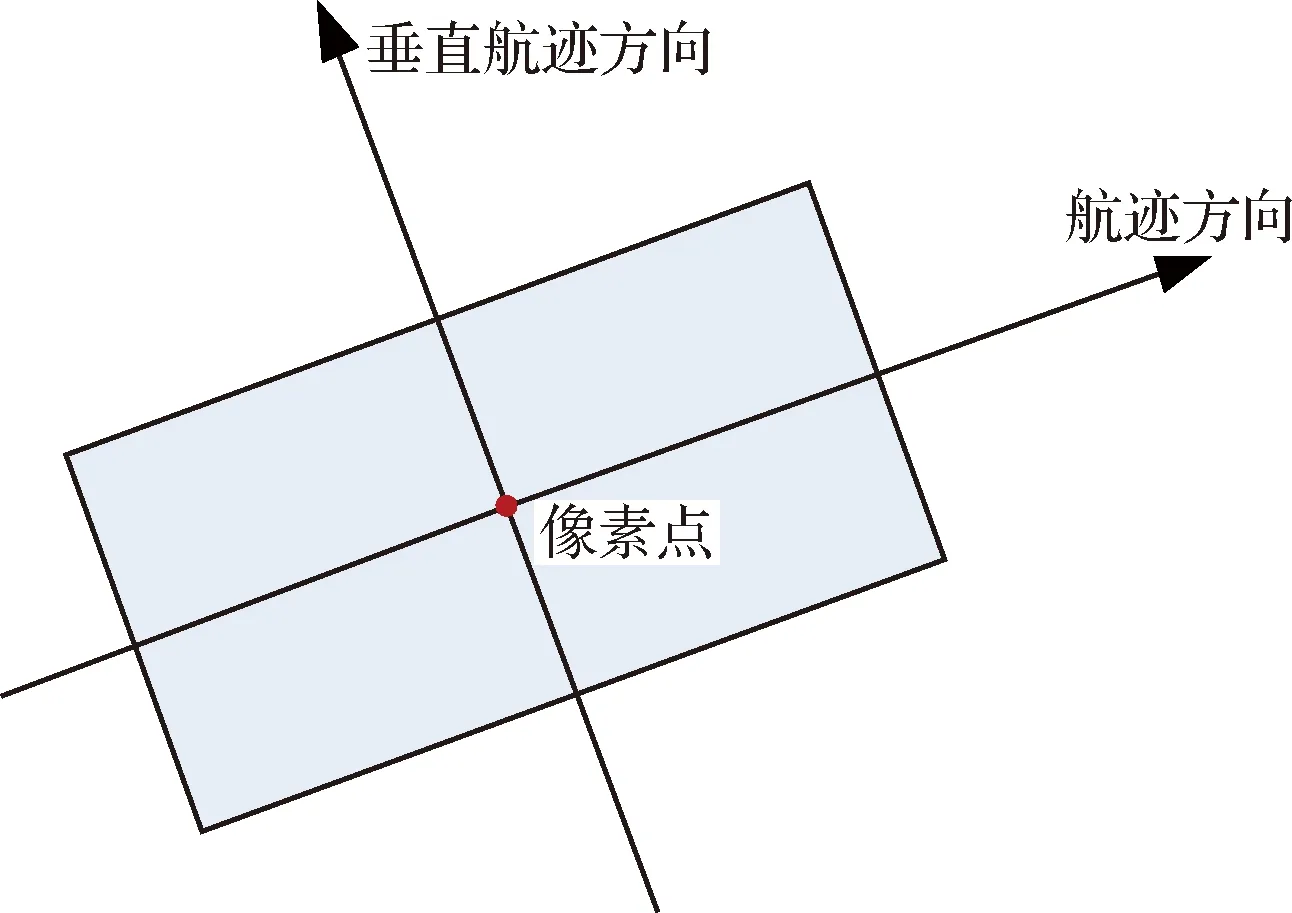
图5 可靠避障点及安全着陆区搜索窗口Fig.5 Search window of reliable obstacle avoidance point and safe landing area
4)搜索安全着陆区并精选着陆点
以15 km×6 km斜矩形区域(长轴为沿航迹方向,短轴为沿垂直航迹方向)作为滑动窗口,斜角为航迹与预选着陆区DEM中纬度线夹角,如图5所示,采用式(7)对预选着陆区中DEM的所有像素进行逐点评估,获得安全着陆区,并确定安全着陆区的中心点为轨道设计目标着陆点。
5)定量评估安全着陆区的地形安全性
以安全着陆区的中心点作为目标着陆点设计着陆下降过程标称航迹,将着陆下降过程的探测器飞行高度与器下点地形高程进行比对,若探测器在着陆下降过程中的飞行高度均高于器下点地形高程,则认为探测器着陆下降过程飞行安全,且所选安全着陆区内的所有像素点(100%)均为可靠避障点,到达该安全着陆区内任一点,探测器均可通过其自主避障安全着陆,因此认为所筛选出的安全着陆区为100%地形安全着陆区。
3 试验验证
嫦娥五号探测器月面预选着陆区地形数据源是由国家天文台提供的嫦娥二号获取的7 m分辨率遥感图像所重建的DEM,该DEM分辨率也为7 m,范围约为43°±1°N,49.12°W~54.08°W,如图6所示,颜色越深,地形高程越低。采用本文的逆金字塔式地形安全性分析与定量搜索模型对该区域的月面地形进行分析,获得安全着陆点和可靠避障点分别如图7和图8所示,图中白色区域为不满足要求的像素点集合,图7中黑色区域为安全着陆点集合,图8中黑色区域为可靠避障点集合。
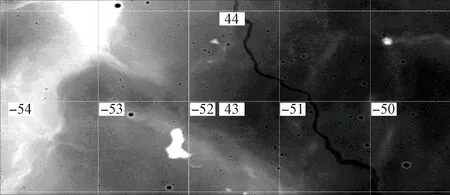
图6 嫦娥五号探测器预选着陆区域DEMFig.6 Pre-selected landing area DEM of Chang’e-5
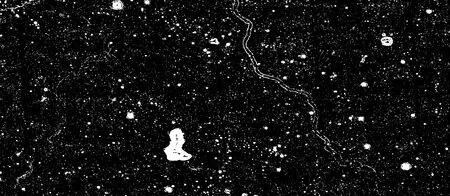
图7 嫦娥五号探测器预选着陆区域安全着陆点(黑色区域)Fig.7 Safe landing points (black area) in pre-selected landing area of Chang’e-5
图8 嫦娥五号探测器预选着陆区域可靠避障点(黑色区域)Fig.8 Reliable obstacle avoidance points (black area) in pre-selected landing area of Chang’e-5
对比图6与图7、图8,安全着陆点与可靠避障点处于地形平坦区域,基本避开了高山和月坑。
嫦娥五号探测器着陆下降过程标称航迹线与月球纬度线的夹角约为7.5°,以15 km×6 km的矩形区域作为滑动窗口,矩形斜角为7.5°,如图5所示,以图8所示可靠避障点为输入,对预选着陆区进行搜索,获得安全着陆区如图9中斜矩形区域A所示,具体位置见表2。经比对,斜矩形区域A内所有像素点均为可靠避障点,验证了本文方法的正确性。
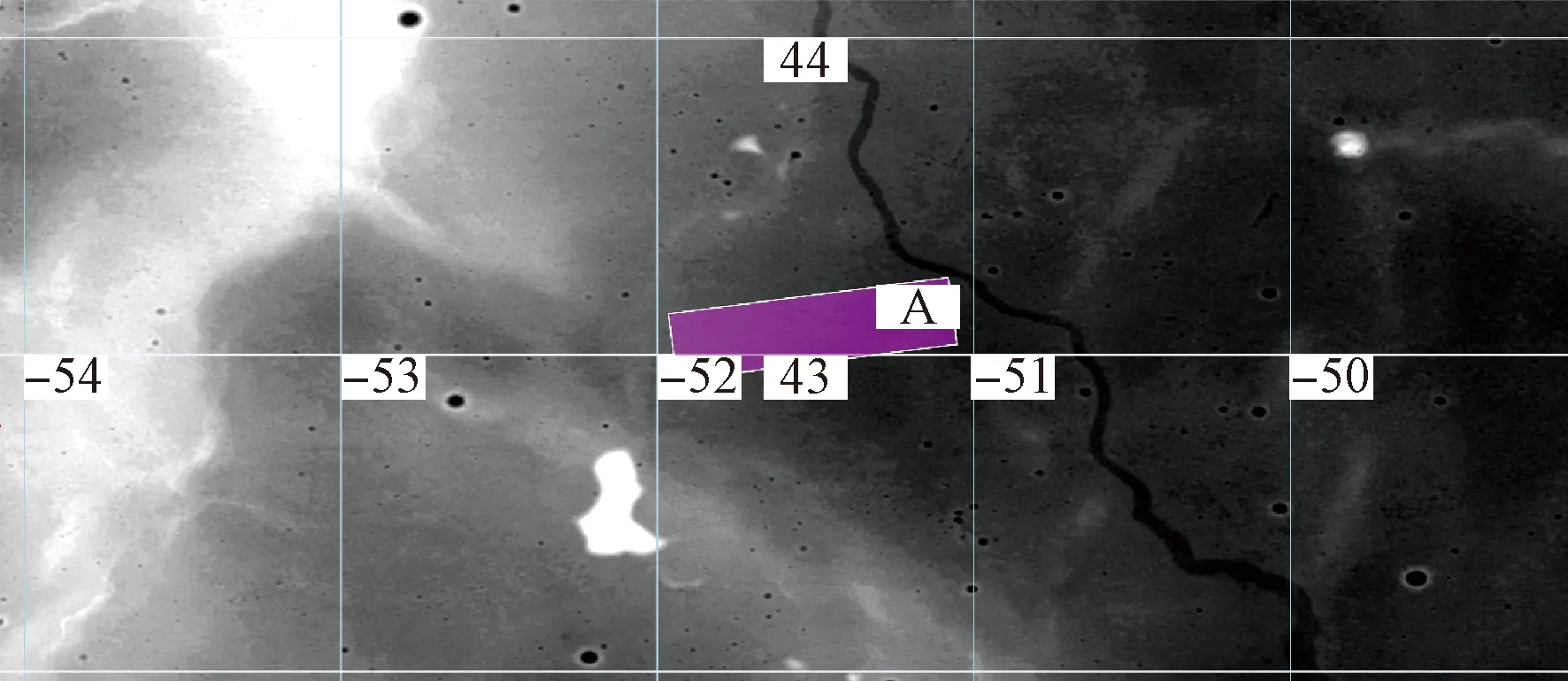
图9 嫦娥五号探测器预选着陆区域内的安全着陆区(斜矩形区域)Fig.9 Safe landing area (oblique rectangular area) in pre-selected landing area of Chang’e-5
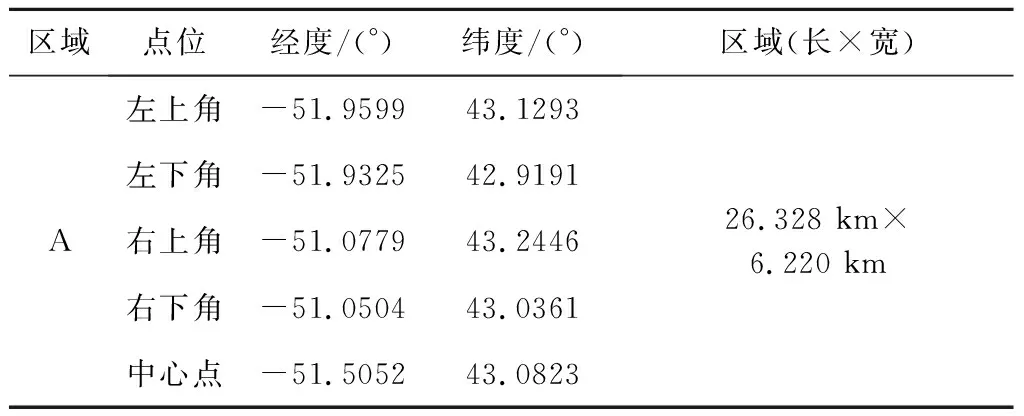
表2 安全着陆区具体位置Table 2 Specific location of safe landing area
以安全着陆区A的中心点为目标着陆点设计轨道标称航迹,具体月面落点位置为43.08°N,-51.51°W,着陆下降航迹如图10所示,起飞上升航迹如图11所示。为确认着陆及起飞上升过程地形安全性将着陆下降过程和起飞上升过程中的探测器飞行高度与器下点地形高程进行对比,分别如图12和图13所示,整个着陆下降和起飞上升过程中,探测器飞行高度始终比器下点月面地形高程高,始终处于月面地形上方,处于安全飞行状态,且所选安全着陆区内的所有像素点(100%)均为可靠避障点,到达该安全着陆区内任一点,探测器均可通过其自主避障安全着陆,因此认为所筛选出的安全着陆区为100%地形安全着陆区。
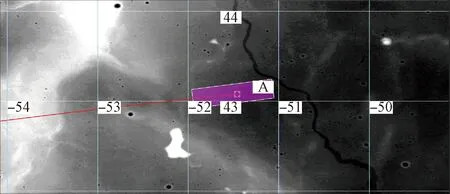
图10 月面着陆下降标称航迹Fig.10 Normal trace in lunar landing descent process
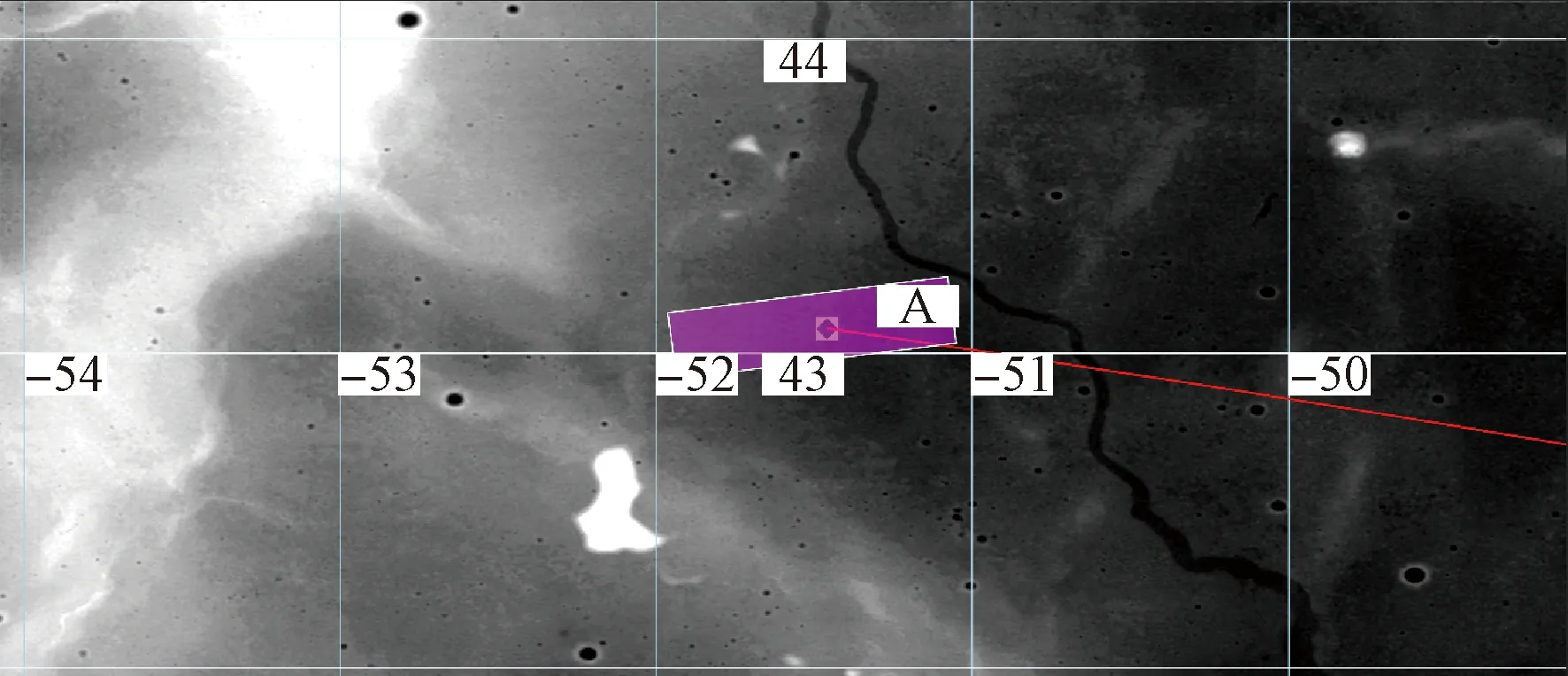
图11 月面起飞上升标称航迹Fig.11 Normal trace in lunar take-off and ascent process
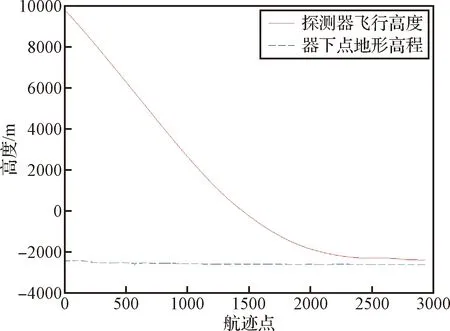
图12 着陆下降过程中探测器飞行高度与器下点地形高程对比Fig.12 The comparison between the altitude of the spacecraft and the latitude of the terrain point under the spacecraft during landing descent process
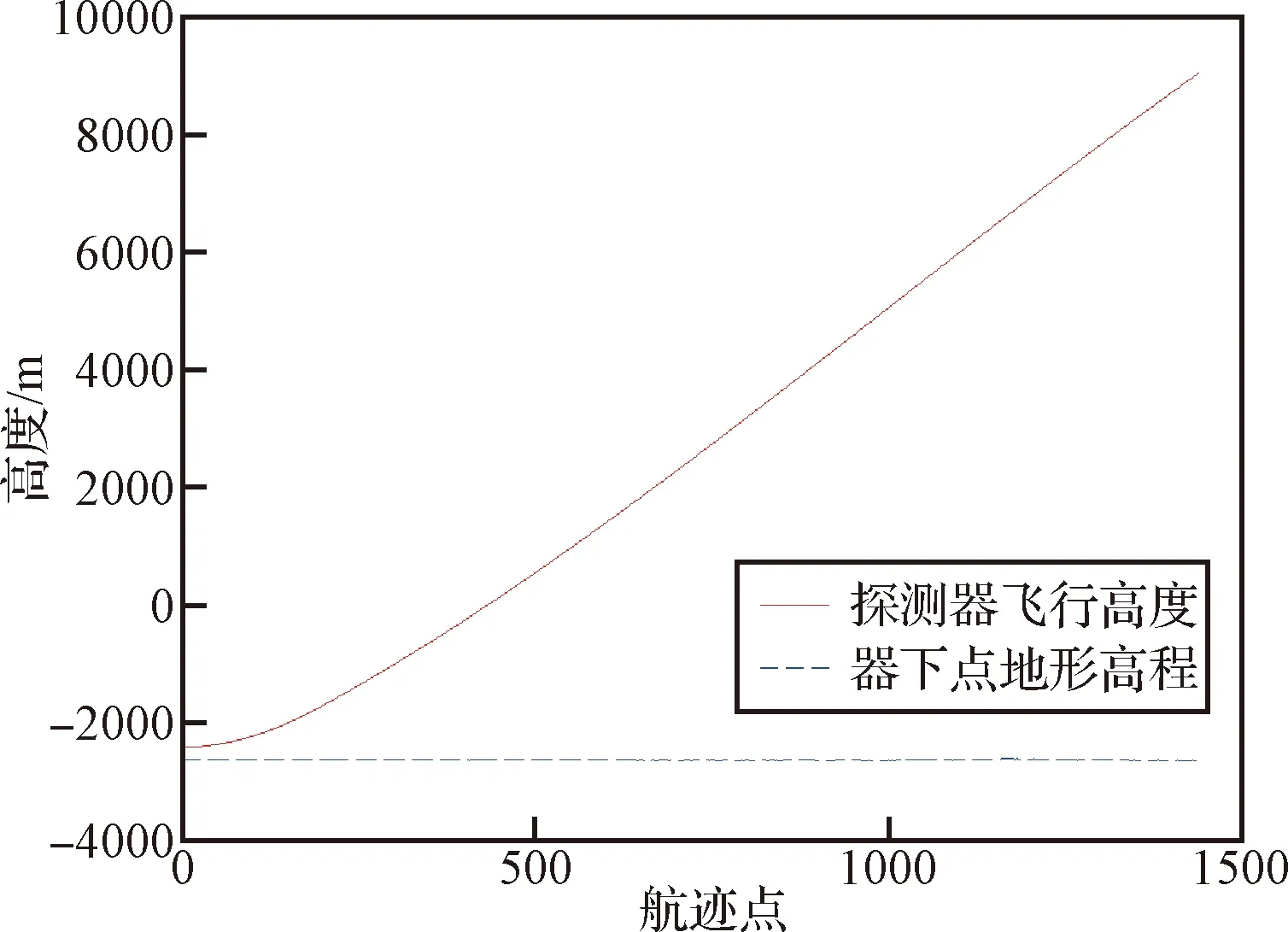
图13 起飞上升过程中探测器飞行高度与器下点地形高程对比Fig.13 The comparison between the altitude of the spacecraft and the latitude of the terrain point under the spacecraft during take-off and ascent process
嫦娥五号探测器在轨飞行过程中,严格按照标称航迹飞行,但考虑7500 N发动机推力在轨标定数据与实际值误差的因素,为防止探测器偏离安全着陆区A且落入其东外侧深沟,采用小推力值在轨装订7500 N发动机的策略,并以安全着陆区A左侧为着陆目标点设计了动力下降控制策略,实际安全着陆于43.06°N,-51.92°W,该点为标称航迹上的点,且位于安全着陆区A的左侧,如图14所示,说明本文方法可有效指导着陆下降过程的标称航迹设计和轨道控制策略制定。
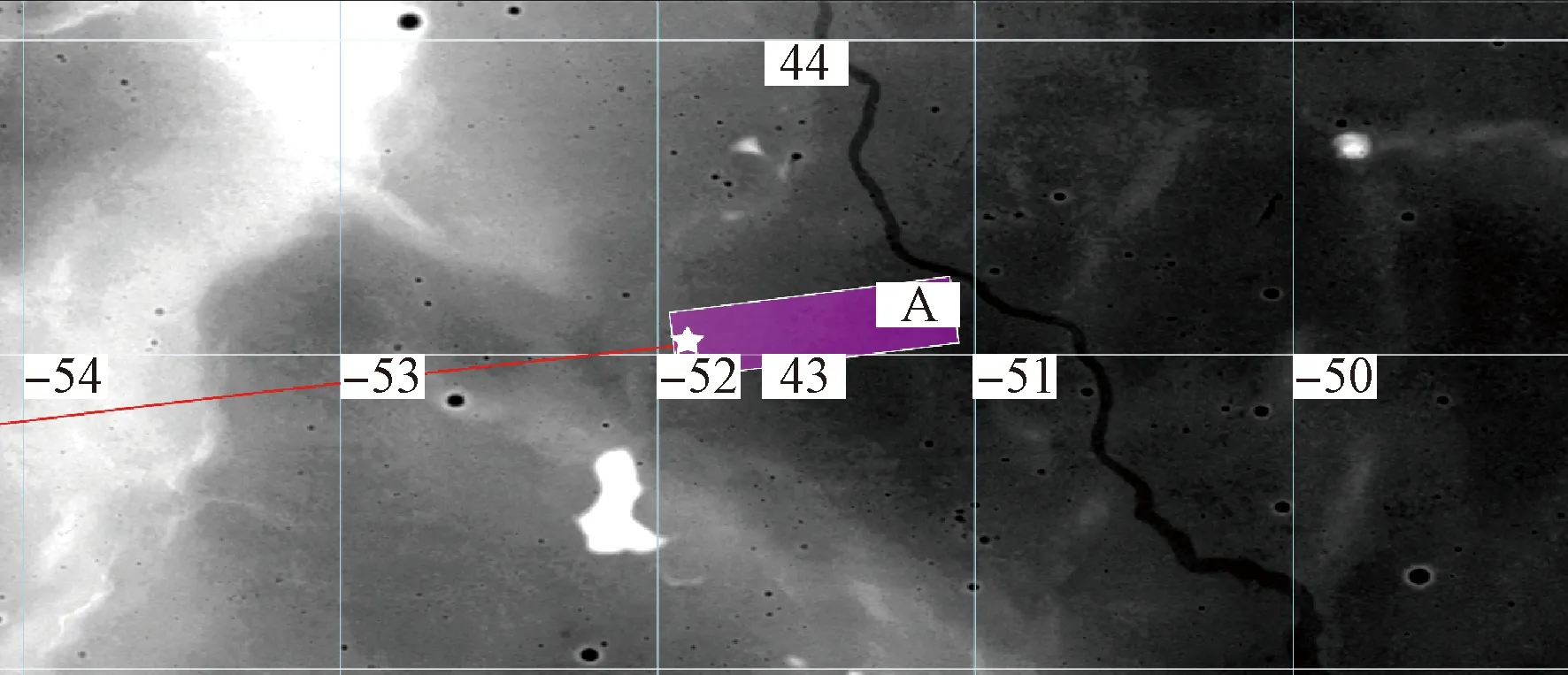
图14 嫦娥五号探测器实际飞行落点位置(五角星)Fig.14 Actual flight landing site(pentagram) of Chang’e-5
4 结 论
本文结合落点精度、自主避障能力和地形坡度适应能力,建立了基于平整点、安全着陆点、可靠避障点和标称着陆点的逆金字塔式地形安全性分析与定量搜索模型,可获得与探测器着陆能力相匹配的100%地形安全着陆区及标称着陆点,对嫦娥五号探测器预选着陆区进行了地形分析,获得了与嫦娥五号探测器着陆能力相匹配的100%地形安全着陆区及标称着陆点,飞行过程中指导了着陆下降过程的标称航迹设计和轨道控制策略制定,保障了嫦娥五号探测器月面安全着陆。
