基于动态贝叶斯网络和模糊灰度理论的飞行训练评估
2021-10-21刘浩王昊孟光磊吴昊周铭哲
刘浩,王昊,孟光磊,吴昊,周铭哲
1. 航空工业沈阳飞机设计研究所,沈阳 110035
2. 沈阳航空航天大学 自动化学院,沈阳 110136
随着现代信息化装备的快速发展,空中军事力量的地位和其在综合国力中展现的作用越来越大。在现代空战过程中,战斗机常采用机动动作进行进攻或规避,飞行员执行机动动作的能力将直接影响空战结果。因此,对飞行员执行机动动作的能力的训练是非常有意义的。对飞行训练进行客观、系统和全面的评估不仅可以准确高效地找到飞行员急需提高的科目,有针对性的提升飞行员的飞行水平和作战能力,还可以降低训练成本、提高训练效率。由此可见,深入分析战斗机飞行训练评估问题具有重要的军事价值和实际意义。
目前,学者们提出了多种战斗机飞行训练评估方法,主要有:专家系统[1]、层次分析[2]、序关系分析[3]、模糊理论[4-8]、神经网络[9-12]等。文献[1]依据训练大纲及飞行数据,采用专家系统评价法对飞行训练进行评估,该系统能够对评定的成绩进行管理、保存、编辑、统计以及打印,操作方便,可快速准确地完成飞行训练成绩评定;文献[2]在遵循真实性原则的前提下设计了评估指标体系结构,并在此基础上开展了基于层次分析法的飞机模拟训练评估;文献[3]结合飞行员经验及相关评价准则,确定了不同飞行阶段下的飞行品质评估指标及指标对应的权重,从而对飞行参数成绩进行加权,基于序关系分析法建立了飞行训练成绩评估数学模型,实现了对飞行品质的评分;文献[4]采用模糊集方法来处理专家意见中的不确定性,通过多个模糊集对参数进行建模,可以评估不同情况下的操作风险;文献[9]综合了飞行员的心率、呼吸频率和典型飞行参数对飞行品质的描述,建立了BP神经网络模型,利用该模型可计算出各评估指标对最终评价分数的影响,对飞行训练进行自动评分,结果合理性良好。文献[11]提出了基于教员经验打分和大量历史数据的BP神经网络,构建飞行训练科目评估模型,通过分析模拟机飞行训练品质评估系统的需求和性能指标,结合数字图像处理、模式识别和人工神经网络等技术,设计系统的整体结构。采集模拟机数据、处理并识别飞行参数以此来对飞行训练品质进行评估。上述方法主要根据训练大纲与飞行训练数据开展训练后的飞行品质评估,一方面,由于实际飞行训练中的不确定性,缺少了对实时飞行训练中机动动作的在线识别,未考虑对不同机型的飞行训练评估的适应性。另一方面,传统评估方法进行飞行训练评估容易受主观因素影响且评估效率较低。
针对战斗机飞行训练评估问题进行了深入研究,提出了基于动态贝叶斯网络和模糊灰度理论的飞行训练评估方法。首先,建立了基于动态贝叶斯的机动动作识别模型,通过飞行训练过程中的飞行姿态信息和敌我双方空间占位信息等数据,利用动态贝叶斯网络推理算法实现机动动作的识别。然后,建立飞行训练评估指标体系,根据机动识别结果选择飞行训练评估指标,并确定了指标权重。最后,根据评估指标数据采用灰度模糊算法对本次训练的飞行品质进行评估,得到评估结果。飞行训练评估系统架构如图1所示。

图1 飞行训练评估系统架构图Fig.1 Structure diagram of flight training evaluation system
1 战斗机机动动作识别模型
在战斗机飞行训练中,准确地识别机动动作是评估飞行员操纵能力的关键前提。动态贝叶斯网络不仅能够对不确定因素进行推理,还能描述动态飞行参数数据的演变过程。同时,动态贝叶斯网络在进行机动动作识别的过程中结合了历史信息和实时数据,更为符合客观事物的发展规律[13-15]。因此,提出了一种采用动态贝叶斯网络来识别机动动作的方法。
战斗机飞行过程中伴随着各种参数的变化,包括飞行高度、飞行速度、俯仰角、滚转角、航向角、迎角和侧滑角等[16]。因此,在对机动动作识别的过程中,可以通过深入分析机动动作的飞行参数变化特征来描述不同的机动动作。
同时,在对飞行参数进行选择时应选取对识别结果影响最大的飞行参数作为目标机动动作识别的基本特征,分别为速度、偏航角、偏航角变化率、高度和高度变化率。在此基础上结合某型战斗机的实际飞行数据对13种机动动作的飞行参数进行综合分析,总结出了飞行参数与定性描述的变化特征之间的一一对应关系,如表1所示。

表1 机动动作参数变化特征
基于动态贝叶斯的机动动作识别网络模型结构由观测节点、中间节点和输出节点组成。将选定的机动动作特征作为模型的观测节点,即模型的输入节点。再根据飞行参数的变化特征与各机动动作的因果关系,对机动动作状态进行逐层划分并作为模型的中间节点。最后输出节点的推理结果为机动动作识别概率值。同时,模型的节点在时间上也有相互联系。各层的节点会结合前一时刻的识别概率值与当前时刻的输入信息更新节点处的概率。机动动作识别网络模型结构如图2所示[16]。
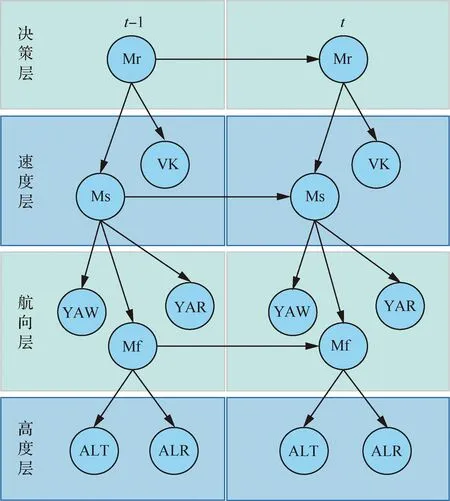
图2 机动动作识别网络模型[16]Fig.2 Maneuver identification network model[16]
机动动作识别网络模型共分为4层,分别为高度层、航向层、速度层以及决策层。第1层高度层根据飞行高度和飞行高度变化率参数的变化特征划分典型机动动作;第2层航向层加入航向角和航向角变化率参数的变化特征,在高度层划分的基础上进一步将典型机动动作划分为直线类机动动作和其他类机动动作;第3层速度层加入飞行速度参数的变化特征,继续对直线类机动动作进行划分;最后,第4层决策层推理出各机动动作的识别概率值并选取概率值最大的机动动作为识别结果。其中,网络模型中各节点的状态集如表2所示。

表2 节点状态集定义
在机动动作识别网络模型中,每条链路中节点之间的因果关系是通过设置条件概率表来描述的。在没有对网络参数进行学习时,节点处的初始条件概率由先验知识定义,在此条件下采用链式网络推理算法,根据确定的网络结构和观测信息不断对网络参数进行学习。在学习的过程中,网络参数将不断优化并逐渐与客观评估规律一致,从而得到贴近客观数据的识别结果。以高度层识别结果节点为例,其条件概率表(Condition Probability Table,CPT)如表3所示。
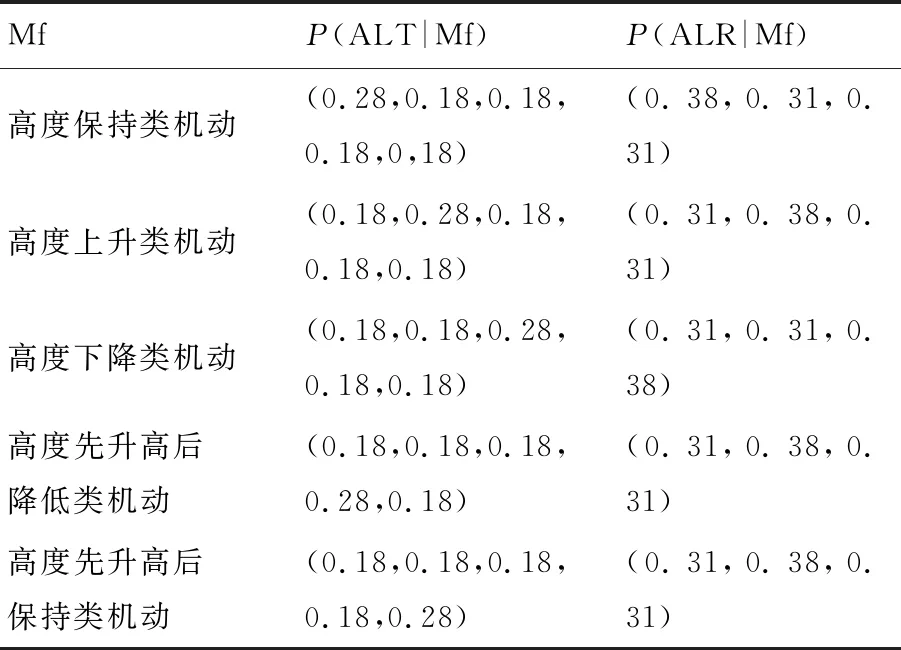
表3 高度层识别结果CPT
机动动作识别网络模型的推理过程分为4个步骤:
步骤1:根据当前时刻观测信息et,计算机动动作识别概率。由当前时刻观测节点的特征提取结果和各条链路的条件概率完成各观测节点到根节点的推理,再将所有链路推理结果相乘得到当前时刻的识别概率分布:
p(Mrt|et)=
p(Mrt|ALTt,ALRt,YAWt,YARt,VKt)=
p(Mrt|ALTt)p(Mrt|ALRt)p(Mrt|YAWt)
p(Mrt|YARt)p(Mrt|VKt)
(1)
步骤2:根据上一时刻推理结果,更新机动动作识别概率。当前观测信息下的链路推理结果与上一时刻的识别结果共同影响机动动作的最终识别结果。根据贝叶斯公式,可求解条件概率分布:
p(et|Mrt)=
(2)
根据上述计算结果,可得到综合历史证据信息的机动动作识别概率分布:
(3)
步骤3:判断收敛性。当网络处于收敛状态或超过最大迭代次数时,不再进行迭代,否则继续进行网络推理。
步骤4:确定识别结果。选择计算概率最大的机动动作为当前时刻的识别结果。
2 评估指标体系构建与权重确定
2.1 评估指标体系构建
为了保证建立的评价指标体系具有科学、准确及实用等良好特性,飞行训练评价指标的筛选过程应该满足下述原则。
1) 系统性原则:评价指标体系需具有充分体现出评价对象在各个方面的特性,即能够对飞行品质的全过程进行有效描述。
2) 科学性原则:确定的评价指标元素能够科学地反映出飞行品质的情况,建立的评价体系结构合理,使用方法原理科学。
3) 可比性原则:选取的各个指标对于评价对象是能够公平对比的,对于最终评价结果是没有主观倾向性的。
4) 实用性原则:选取的评价指标可通过测量或其他手段直接获得,且具有简单、实用、可操作性等优点。
根据评价指标筛选原则,综合分析影响典型机动动作执行标准的因素,依据飞行大纲训练要求和领域专家的资深经验,构建所有机动动作的评估指标体系如表4所示。
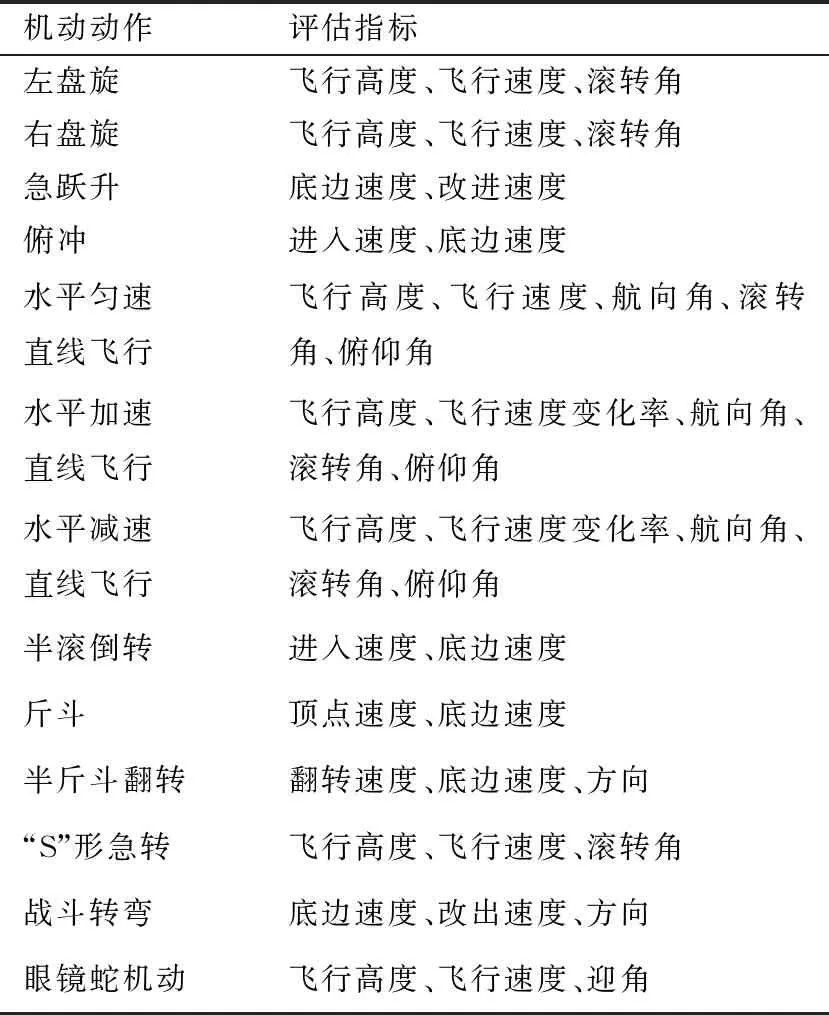
表4 机动动作评估指标体系
将选定的机动动作评估指标划分成5个评估等级,分别为优秀、良好、中等、较差和差。同时给出评价等级的量化标准:优秀的量化标准为(95,100],良好的量化标准为(85,95],中等的量化标准为(75,85],较差的量化标准为(65,75],差的量化标准为(0,65]。以左盘旋机动动作为例,其评估等级划分原则如表5所示。

表5 左盘旋动作评估等级划分原则
2.2 评估权重计算
评估指标的权重反映了各指标因素对机动动作的影响程度,直接影响评估结果。目前权重的确定方法有主观赋权法、客观赋权法以及融合了主、客观赋权法的综合赋权法[17-18]。采用综合赋权法计算评估指标权重。首先,根据机动动作识别模型推理的识别结果在战斗机飞行训练评估指标体系中确定其对应的评估指标。采用层次分析法根据专家经验计算主观权重,同时采用熵值法根据实际飞行数据计算客观权重,最后用线性组合的方式得到最终的综合权重。这样既可以融合专家的主观知识经验,又可以体现出数据表达的客观性。
2.2.1 确定主观权重
采用定量与定性分析相结合的层次分析法确定各指标对改变机动动作评价结果的影响程度,即判定指标的重要程度。以左盘旋为例,其飞行训练评估指标的判断矩阵如表6所示。

表6 左盘旋评估指标判断矩阵
若构建的判断矩阵通过一致性检验,则求解判断矩阵并进行归一化处理,得到左盘旋机动动作评价指标的主观权重向量P=[p1,p2,…,pm]。
2.2.2 确定客观权重
熵权法是一种根据各项指标评价值所提供的信息的大小来确定指标权重的客观方法。信息的大小由熵来度量,信息量越大,不确定性就越小,熵也就越小;信息量越小,不确定性就越大,熵也就越大。根据这个特性,就可以利用熵值来判断某个评价指标的离散程度,从而得到该指标对最终评价结果的影响[19]。例如当样本数据在某指标下取值相同,则表示该指标的离散程度极小,对最终评价结果的影响为0,所以该指标的权值为0。
熵值法的主要计算过程:首先根据战斗机飞行训练评估等级划分原则,结合多次飞行训练的评估指标参数得到原始数据。其次,通过对原始数据进行标准化处理来克服不同目标量纲和量级上的差异。标准化数据的方法为
(4)
式中:i∈[1,n],j∈[1,m],i为针对某机动动作的训练样本,j为评价指标,n针对某机动动作的训练样本数,m为评估指标的个数,Dij为原始数据,Fij为标准化数据,Dijmax和Dijmin分别为评估指标j原始数据中的最大值和最小值。
通过标准化的数据就可以计算出每个评价指标的熵值:
(5)

最后,通过所有评价指标的熵值计算得到机动动作评价指标的客观权重Q=[q1,q2,…,qm]:
(6)
2.2.3 确定最终指标权重
为了降低主客观赋权法各自缺点对指标权重确定的影响,采用线性组合赋权法对主观权重向量和客观权重向量加权处理,确定最终的指标权重向量:
C=[c1,c2,…cm]=k1×P+k2×Q
(7)

3 基于模糊灰度理论的训练评估方法
目前,飞行员训练评估的方法主要是根据教练员的经验简单地将评估结果划分为“及格”或“不及格”,很难反映出飞行员具体的能力水平。同时,由于飞行参数数据不可避免的存在信息不完备、不全面、不充分的情况,因此,采用将模糊数学的隶属度理论与灰度理论结合的方式来解决飞行训练评估中不确定性问题[20-23]。
3.1 确定权重集
灰色模糊评价算法中的权重集表示的是各指标因素与被评估对象之间的灰色模糊关系,包括模糊和灰色两部分,可以表示为

(8)


表7 灰度打分标准
考虑到评估时应具备精确性和可操作性的特点,所以为评价集合的每一等级设置了对应的数值范围组成评语集,即:V0={100,90,80,70,60}。
3.2 建立模糊灰度评估矩阵
为了体现包含m个指标因素的因素集合与包含5个评判等级的评语集合之间的模糊和灰色关系,建立了模糊灰度评估矩阵[27]:
(9)
式中:R1为模糊部分,表示各评估指标隶属于各等级的隶属度,其元素为μij;R2为灰色部分,表示专家对于隶属度信息的充分性给出的对应灰度值,其元素为φij。模糊灰度评估矩阵元素的模糊部分通过构建隶属度函数的方式确定,灰度部分由专家投票打分的方式确定。
3.2.1 确定隶属度函数
根据隶属度函数理论,依据评估指标体系中的准则确定隶属度函数。以各评价指标的偏差值x为基础,其对应的隶属度即为评估矩阵的模糊部分。根据对应评价等级划分的极值点确定了5个特征点ΔDi,i=1,2,…,5。
(10)
μ2(x)=
(11)
μ3(x)=
(12)
μ4(x)=
(13)
(14)
建立的隶属函数模型如图3所示。

图3 隶属度函数模型Fig.3 Membership function model
3.2.2 确定灰度
模糊灰度评估矩阵中的各指标的评分灰度值φij,是根据统计专家的评分得到的。具体的实现方法是:N位专家依照打分标准分别对影响机动动作的指标因素进行灰度值评分。同时,为了降低专家主观因素对结果的影响,在统计的过程中将去掉最大值和最小值后求取平均数作为最终灰度值。
3.3 计算评估结果

(15)
(16)
令dj=1-vj,表示对于隶属度的可信度。再与评语集向量对应的分数V0相乘就可以得到机动动作执行评估结果:
(17)
4 仿真分析
为验证战斗机飞行训练评估方法的有效性,进行了仿真实验。将战斗机的实时飞行参数进行特征提取、离散化处理后,传递给动态贝叶斯网络模型,推理得到机动动作识别结果,根据机动动作识别结果选择评估指标,采用模糊灰度评估方法计算得到飞行训练品质评估结果。通过模拟一组机动动作进行自主飞行训练评估的准确性及可行性分析。具体仿真飞行轨迹如图4所示。
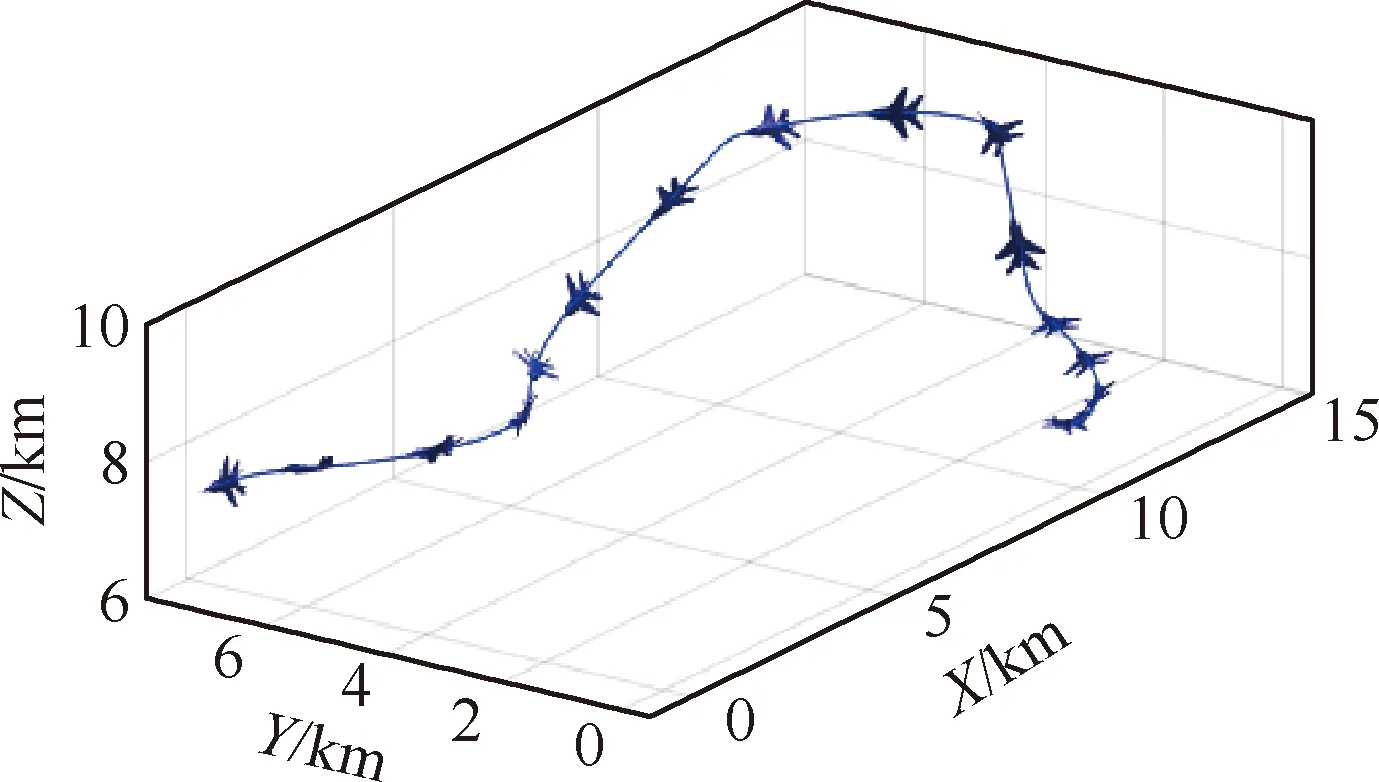
图4 飞行训练仿真轨迹Fig.4 Trajectory of flight training simulation
4.1 机动动作识别结果分析
在战斗机飞行训练的初期,高度、高度变化率、航向角变化率和速度的变化特征为不变,航向角的变化特征为减小,此时经过模型识别出机动动作为左盘旋;当飞行训练到第23.80 s时,高度、航向角和速度的变化特征更新,模型的识别结果为急跃升;至第37.50 s,高度、航向角和速度变化特征再一次更新,得到模型的识别结果左盘旋;至第53.95 s,除航向角变化率外的其他飞行参数的变化特征均进行了更新,更新模型的识别结果为俯冲;至第63.75 s,除速度以外的其他飞行参数的变化特征再一次进行更新,识别结果为“S”形急转机动动作。识别过程中具体的特征提取情况如图5所示。

图5 识别过程特征提取结果Fig.5 Feature extraction results of recognition process
飞行训练过程中识别机动动作的概率变化如图6所示。为了更明显的看出识别概率的变化,在23.80、37.50、53.95、63.75 s处,即飞行参数的变化特征更新时,坐标轴单位长度为1 s;在机动动作识别概率达到90%后,将坐标轴单位长度改为10 s,直至下一次飞行参数的变化特征进行更新。其中,图6的机动动作编号对应表1中眼镜蛇机动动作。

图6 机动动作识别概率Fig.6 Maneuver recognition probability
由机动动作识别概率结果可知,在飞行训练过程中,战斗机先后进行左盘旋、急跃升、左盘旋、俯冲、“S”形急转,机动动作识别结果如表8所示。
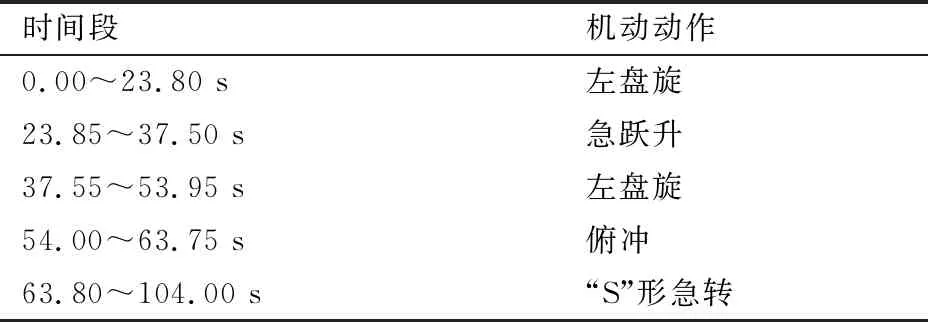
表8 机动动作识别结果
利用蒙特卡罗模拟实验[28-30]对机动库中的机动动作进行随机调用。对6 000组实验数据进行识别,实验结果表明,本文方法对机动动作平均的识别率为97.2%,超过平均水平。
4.2 战斗机飞行训练评估方法分析

根据飞行训练采集到的滚转角、飞行高度和飞行速度的实验数据,结合左盘旋机动动作评估等级划分原则,对滚转角、飞行高度以及飞行速度进行分析得到评估原始数据。在进行数据标准化处理时,所有评估指标均为正向指标。标准化处理结果如表9所示。
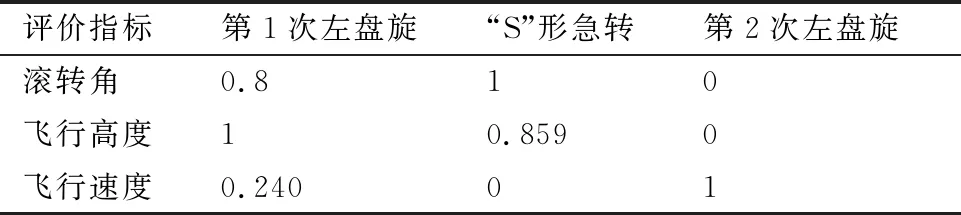
表9 评价指标的标准化数据
根据熵值计算公式可计算出滚转角、飞行高度以及飞行速度的熵值G={0.880,0.628,0.448}。最终利用各评估指标熵值得到客观权重向量为Q={0.529,0.356,0.115}。得到左盘旋机动动作的主、客观权重后,采用线性组合赋权公式对主客观权重进行加权处理,同时将k1和k2的取值均设定为0.5,从而得到最终指标权重向量C={0.544 5,0.338,0.117 5}。

按照构建的左盘旋机动动作评估指标隶属度函数,对灰色模糊评估矩阵的模糊部分进行取值,得到飞行高度指标的优秀隶属度为1,其他评估等级隶属度为0;飞行速度的中等隶属度为0.61,良好隶属度为0.39,其他评估等级隶属度为0;滚转角优秀隶属度为0.55,良好隶属度为0.45,其他评估等级隶属度为0。
以“滚转角”指标因素为例,8位专家对模糊评估矩阵中隶属度充分性的打分情况具体如表10所示。

表10 滚转角评估隶属度专家灰度打分
将专家对每一等级的灰度打分去掉最高分和最低分后取平均值,作为灰色模糊评估矩阵中的灰度部分。确定模糊部分和灰度部分的取值后得到本次左盘旋机动动作训练的灰色模糊评估矩阵为


按照评估等级划分的分数范围标准,得到最终评价分数为93.6。同理可得,急跃升、第二次左盘旋、俯冲和“S”形急转的评估得分依次为90.1、 87.8、90.9和81.2。具体评价分值显示如图7所示。

图7 机动动作评估结果Fig.7 Maneuver evaluation results
5 结 论
1) 提出的战斗机飞行训练评估方法能够实时根据飞行过程中的飞行参数、空间占位等信息的变化,对飞行训练任务执行情况进行在线的智能化识别与评估,减少了教练员的工作量,提高了飞行训练评估效率。
2) 提出的算法对机动动作具有较高的识别率。在大样本实验测试中,对表1中机动动作的识别准确率均达到95%以上。
3) 针对自主飞行训练评估问题,提出了一种基于灰色模糊理论的评估方法。通过指标数据偏差的隶属度函数构建和专家灰度打分确定了当前飞行训练下各指标的模糊评价与信度,实现了对战斗机自主训练下的机动动作执行情况进行评估,解决了传统由教练员主观评价容易受主观因素影响的问题,具有实际工程应用价值。
4) 提出的战斗机飞行训练评估方法具有较好的泛化能力,经过适应性修改,可为其他机型的飞行训练评估提供有益参考,值得推广。
