基于OODA环的对地攻击流程半实物仿真验证方法
2021-10-21张昊金琳乘王胜男
张昊,金琳乘,王胜男
航空工业沈阳飞机设计研究所,沈阳 110035
未来战争具有深度信息化、智能化、无人化的特点,无人作战的相关概念和技术飞速发展,如何更好地将无人飞行器应用于现代战争已经成为备受关注的研究热点[1-4]。对地攻击无人机作为信息化战争的战场作战单元,可以独立完成探测-识别-决策-打击-评估的作战流程闭环[5-6]。
机载航电软件和设备是影响对地攻击无人机作战能力的关键,其中对目标的攻击流程是无人机重要的任务环节。为保证飞行试验任务成功和无人机安全,需对无人机和环境要素进行充分的地面验证。但是在地面难以创造出飞行和战场环境,需合理设计验证方法验证对地攻击流程的正确性和可行性。
目前在验证系统过程方面,不同的工程方向根据自身研究对象的实际情况形成了一些验证方法。在航天领域,由于在地面难以创造出失重和真空的复合环境,对太空过程的验证一般利用各种物理环境近似的方法分阶段实施[7-9]。在数据处理领域,对数据处理过程的验证方法多是通过判读处理结果的正确性或信号效果进行评价[10-12]。在网络技术领域,对网络功能流程的验证一般采用计算机仿真的手段,通过系统运行和数据流向的正确性实现验证方法的构建[13-16]。在飞行器领域,学者们一般采用半实物的地面仿真试验来验证飞机飞行过程的可靠性或导弹攻击飞行过程的有效性[17-19]。
在飞行器的任务过程领域,对飞行任务过程的验证方法和手段还停留在计算机仿真层面,尚未涉及像航天过程和飞行过程一样的半真实环境验证方法,而无人机对地攻击的任务过程需要在飞机设计时就依靠机载设备条件得到可靠有效的验证。
为了解决以上问题,本文采用观察-判断-决策-行动(Observation-Orientation-Decision-Action, OODA)环的思想,将对地攻击流程验证工作融入攻击流程半实物试验中,分析了无人机对地攻击流程,依托真实机载设备构建了半物理的验证系统,在计算机仿真部分融合攻击过程的精度模型,形成了一种无人机对地攻击流程验证的新思路。
1 无人机对地攻击流程分析
1.1 作战流程
现代化战争中战场形势瞬息万变、实时数据庞大、对抗环境复杂,战争形态已经由传统的“平台中心战”向“网络中心战”转变,无人机正在作为网络节点参与到体系对抗中来。对地攻击型无人机具备侦察探测能力、数据分析融合能力、自主决策能力和对地攻击能力,其对地攻击的过程遵循着感知-判断-决策-行动的OODA环周期。对地攻击型无人机对地上目标攻击过程是一种复杂、连续的信息处理与信息操纵过程,具体对地攻击的作战过程可分为信息感知、威胁研判、自主决策和攻击执行4个阶段[20],与OODA环一一对应,如图1所示。

图1 无人机对地攻击作战过程Fig.1 UAV air-to-ground attacking process
对无人机对地攻击流程的验证手段需要从感知-判断-决策-行动的OODA环出发,充分考虑实际作战过程中的各种因素,在验证环境中通过实物驱动或数字仿真的手段逼近真实战场作战过程,使攻击流程得到有效验证。
1.2 感知过程
无人机的感知过程是通过数据链接收、本机探测得到战场的态势信息,进行传感器数据融合、目标样本积累和特征融合,经过本机的处理单元进行处理、学习和分析,优化产生可供无人机使用的信息,完成对战场的态势感知和目标识别。
在高对抗干扰、高实时响应战场环境下,无人机装备的多种传感器,如合成孔径雷达、激光雷达、多谱或超谱传感器等,提取到的战场信息数据形式与数据格式差异巨大,所包含的信息属性不能保持一致,得到的数据也会存在模糊或丢帧现象,导致侦测信息的威胁特征不明显或在时间和空间维度上不连续。
对地攻击型无人机还需要应对战场中存在的伪装、诱饵等能模拟真实目标的外形、温度、电磁特性等有限特征的手段;其中存在的敌方对抗系统也会对成像侦察、红外侦察以及电磁侦察等手段进行干扰。
1.3 判断过程
无人机的判断过程是对战场信息感知过程得到的数据信息分析、归类处理,结合起飞前的任务规划与装订信息,筛选识别任务目标,对不断到来的数据逐步判别达到对敌方意图和作战计划辨别的目的。
当前环境下,“人工智能(AI)、云、网、群、端”已经逐步成为智能化战争中的制胜手段,对OODA环路中判断环的影响与干扰因素蜂拥而至。敌方行为方式不再与传统战术战法相同,包括分化与离散、集结与聚合、突然袭击等,在广域化的对抗环境下,敌方元素规模庞大、行为单元密集、关系演进诡变,无人机的威胁研判过程已经成为攻击过程的重要环节。
1.4 决策过程
决策是智能化战争对抗的核心和中枢。自主决策过程体现在完成起飞与引导航路的飞行后,无人机根据战场环境和装订任务的变化改变自身飞行策略,自适应地调整任务规划。
无人机利用数据、知识、场景等驱动方式,根据复杂、多变的态势条件和敌方的实时作战意图,预测敌方行为、筹划飞行航线、制定最优的飞行和攻击方案、优化攻击列表序列等,在任务规划时就考虑无人机对各种战场对抗因素的适应性,为后续的行动打击环节奠定有利条件。
在高度不确定的战场条件下,无人机的自主决策功能通过先验知识以及与环境交互得到的信息,进行分析和策略定制;通过态势信息及预测信息,针对防空威胁和所攻击目标的毁伤特征,制定攻击方案以及对突发情况采取的机动措施,提高作战效能。
1.5 行动过程
由于无人机的作战任务是对地攻击,机载武器一般是激光制导炸弹和卫星制导炸弹,其攻击流程的OODA环的行动过程是指根据任务规划和攻击决策信息完成火控解算、攻击引导、武器投放和目标指示的攻击过程。
无人机的行动过程直接关系到本次攻击任务的完成情况,在攻击过程中无人机投放状态、战场风环境、目标指示精度等多种因素都会对制导炸弹的命中概率造成影响。卫星制导炸弹对目标打击精度主要在于武器自身精度,激光制导炸弹则主要在于激光制导精度和武器自身精度。目标的易损特性和武器的命中误差直接影响着制导炸弹的毁伤效果,影响着整个攻击流程的最终判定结果。
因此在无人机对地攻击流程的验证过程中需要考虑攻击过程中存在的各种误差因素,对攻击流程中的误差链建模形成有效的毁伤传递仿真环节,来保证对地攻击流程的有效验证。
2 基于OODA环的半实物验证系统
2.1 系统架构
半实物验证方法是近年来研究复杂系统验证的可靠手段,同时也是进行效能评估的重要方法。半实物验证的主要目的是评估系统的任务品质并检测设计缺陷与偏差,验证平台一般按照目标系统的真实构造进行构建,具备模拟无法真实构建的验证条件。
基于OODA环的攻击流程半实物仿真验证系统通过真实机载设备与计算机仿真相结合的方式,机载嵌入式软件与相应的设备可以在新型飞机初期设计定型试验中得到有效的验证。依靠高实时性的反射内存交换网络,计算机仿真环境可以便捷地引入相应的试验验证条件,以及存储验证过程中的通信数据与系统信息,从而形成整个攻击流程验证的数据闭环。系统架构如图2所示。
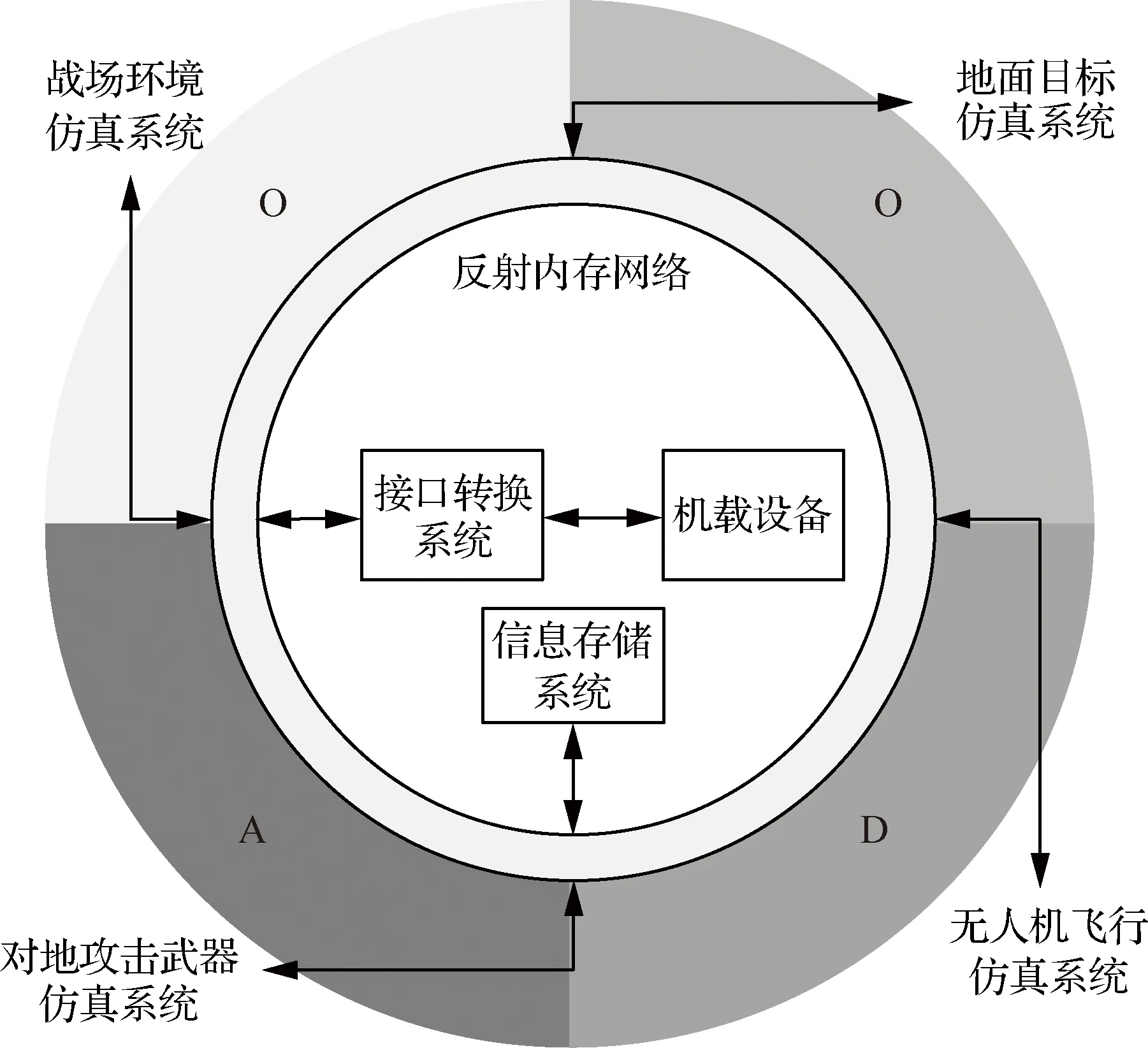
图2 半实物验证系统结构Fig.2 Structure of semi-physical verification system
2.2 实时接口网络
本文采用的半实物仿真验证系统基于Windows系统开发,具有应用软件平台丰富和软件实体便于使用人员操作的优势,同时也受到内核设计中按照源码分条(排队)式执行的影响在同步性方面存在不足。因此在半实物验证系统架构的设计中,对仿真系统按功能划分进行物理式分离,分为战场环境仿真系统、信息存储系统、接口转换系统、飞行仿真系统、目标仿真系统和武器仿真系统6个子系统,结合反射内存网络的数据通信方式,弥补Windows开发带来的同步性影响,形成高实时性的半实物验证系统。
反射内存网络采用多个独立的计算机共享通用数据集的方式,形成了一种共享计算机内存的网络系统。反射内存网络中的计算机应用软件在ns级的时间内将需要共享通信的数据写入内存网卡空间中,并在μs级时间内通过网络将信息同步到网络上所有带有反射内存卡的计算机上。
采用反射内存网络构建的半实物仿真验证系统形成了分布式实时同步网络的架构,在对地攻击流程的验证中具备实时模拟战场单元的能力,形成了一套实时的数据驱动仿真闭环。图3显示的是反射内存网络系统通过数据控制与交换设备控制整个网络的工作流程与管理信息,各入网计算机按照设定的网络内存卡地址可同步对网络内所有反射内存进行共享。

图3 反射内存网络系统Fig.3 Reflective memory network system
2.3 机载设备与环境交联
为了实现机载设备与验证环境中仿真系统的互联互通,使验证环境产生真实可靠的驱动数据,接口转换系统将光纤总线数据转化为机载通信数据发送给环境中的机载设备。同时接口转换系统也作为机载设备和验证环境的物理隔离,形成对机载设备和光纤总线的双向保护。
接口转换系统将真实的机载设备和仿真验证环境形成交联,使半实物验证系统的功能闭环。图4为接口转换系统的组成框图。

图4 接口转换系统组成Fig.4 Formation of interface conversion system
接口转换系统通过特定的适配电缆与机载设备连接,在非总线信号处理功能中完成设备与环境间离散信号和脉冲信号的A/D与D/A转换,同时将音频/视频信号打包转换。接口转换系统通过自身的反射内存模块与高速实时的反射内存网络连接,在总线信号处理功能中完成与其他子系统和机载设备的信息数据交换。
3 精度模型
3.1 感知精度模型
无人机的态势感知能力主要由数据链能力和机载传感器能力组成,因此在对无人机攻击流程进行半实物验证时需要将感知精度模型划分为数据链精度模型和传感器精度模型。
数据链的精度水平主要体现在任务数据传输延时,指挥中心将任务信息传输至无人机的时间延迟为上行延迟tup,无人机将战场信息传输至指挥中心的时间延迟为下行延迟tdown。数据链精度仅对无人机攻击任务传递目标时造成影响,表示为
tdelay=tup+tdown
(1)
传感器精度分为本机状态测量精度和目标状态测量精度,本机状态的测量值主要包括高度h、航向ψ、空速V、升降速度Vh、马赫数Ma、攻角α和侧滑角β;目标状态的测量值主要包括目标斜距ST、目标俯仰角φTy和目标方位角φTz。这些载机和目标的测量精度均是传感器测量误差xi,因此可以采用服从于正态分布的指标精度εi表示,当指标精度等于3σ时,其概率密度为
(2)
当无人机的感知过程受到敌方或战场环境干扰时,其对目标的探测精度模型还需要加入探测概率模型。考虑到对地攻击无人机对地面目标的定位手段主要是光学传感器,战场烟幕干扰是主导的干扰条件,因此将目标的图像对比度作为探测概率输出结果。
图5给出了光电测量系统测量物体视在亮度的方式,物体受太阳辐射的影响射出一定光谱范围的辐射光,其经过大气后的衰减可以用大气消光模型计算,大气在太阳的照射下产生的大气背景光亮度亦可被光学传感器捕捉。

图5 大气传输模型Fig.5 Atmospheric transport model
目标/背景的视在对比度可以表示为
(3)
式中:It为目标经过大气传输后的光谱辐照亮度;Ibg为背景经过大气传输后的光谱辐照亮度。
在存在烟幕影响时,目标和背景经过大气传输后的光谱辐照亮度均发生改变,其中,It可表示为烟幕成分的质量消光系数、烟雾浓度和视线上烟幕路径长度的函数:
It=f(αOBS,COBS,LOBS)
(4)
式中:αOBS为质量消光系数;COBS为烟雾浓度;LOBS为视线上烟幕路径长度。
3.2 判断精度模型
无人机通过感知过程得到战场威胁信息后,需要根据自身状态和威胁特性对战场条件中的威胁进行判断。攻击流程仿真验证的判断环节精度建模的工作主要是建立无人机对战场威胁的估计模型,主要体现在对敌方防空火力系统能力的判断。
对地攻击无人机在感知过程可以得到敌方雷达位置坐标(xs,ys,zs)并根据其特征得到敌方雷达的最大探测半径Rs,因此对空预警雷达对无人机的发现概率与二者相对位置的关系为
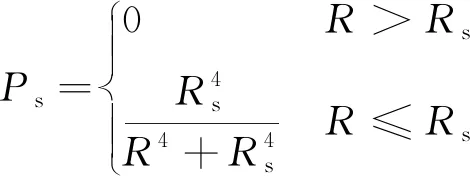
(5)

地空导弹也是敌方防空火力系统的重要组成部分,无人机需要对防空导弹的杀伤区进行判断估计。在防空火力区域内,地空导弹对杀伤距离dsy内的目标可以实现概率杀伤,杀伤概率由目标的速度VT、距离RT、高度hT和航向ψT决定,可表示为
Pk=fk(VT,RT,hT,ψT)
(6)
因此无人机根据当前飞行状态可以估计地空导弹的水平杀伤区范围及杀伤概率,在指定高度地空导弹的水平杀伤区如图6所示。图中O为地空导弹发射点,OS为地空导弹射向,OP垂直于铅垂射向面构成右手系,MNKL多边形区域表示指定高度地空导弹的水平杀伤区,dsj为杀伤区近界,dsy为杀伤区远界。
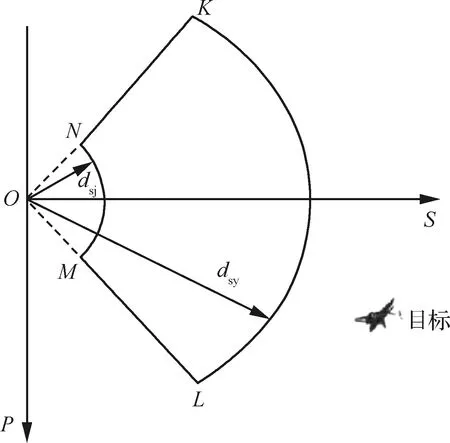
图6 地空导弹水平杀伤区Fig.6 Ground-to-air missile horizontal killing area
3.3 攻击精度模型
在OODA环的行动阶段,无人机执行火控解算、攻击引导、武器投放和目标指示等动作,在此过程中武器的落点系统误差和无人机目标指示误差均会对武器的落点精度造成影响,从而最终影响对地攻击任务的完成情况。
武器的落点系统误差表征着武器自身的精度水平,一般以圆概率误差(CEP)进行考核,转换服从于正态分布的概率密度表示为

(7)
因落点在弹道方向及其水平方向上系统散布基本相同且独立,因此可以得到落点偏差的标准差:

(8)
无人机使用激光制导炸弹时,会射出激光指示目标位置引导激光导引头进行末制导,此过程带来的目标指示误差主要与机目距离和激光光斑偏差有关,可表示为

(9)
式中:LMT为无人机和目标的斜距;(ΔxTp,ΔzTp)为激光光斑实际照射位置与目标实际位置(xT,zT)的偏差;εpx、εpz为激光指示系统的角偏差分解结果。
4 实例分析
4.1 验证条件
为了对某无人机的对地攻击流程进行验证,在仿真验证环境的精度模型中设定不同的通信能力、传感器能力、敌方防空火力系统配置、武器误差和目标指示误差,形成低、中、高(L、M、H)3种不同水平的战场对抗强度,战场对抗强度也表征着无人机所处战场环境的不确定性。在编号为m、n、p的态势环境下(对应的战场对抗强度分别为L、M、H),分别对序号为A、B、C的机载软件进行3次地面目标攻击验证,测试条件见表1。
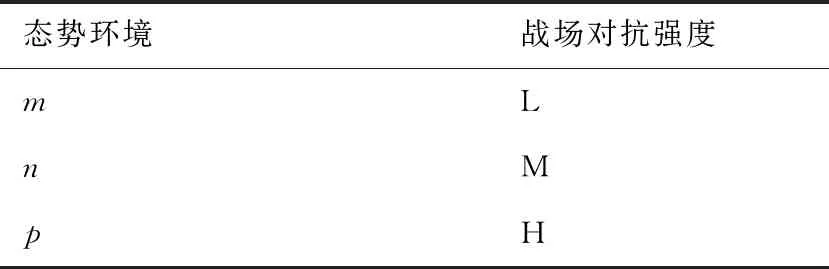
表1 测试条件
4.2 攻击结果
机载软件A、B、C分别在半实物仿真验证环境中进行了9次试验,若无人机在执行武器投放前被敌方侦测则攻击流程失效,选择有效攻击流程对目标的摧毁百分比作为验证攻击流程有效性的判断条件,试验结果见表2。
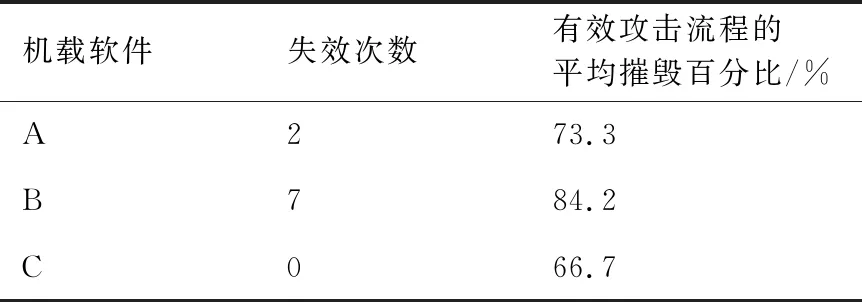
表2 试验结果
表2显示了机载软件在半实物验证的试验结果,可以看出软件B的失效次数最多,有效攻击流程对战场目标的摧毁水平也最高,软件C没有失效次数但对战场目标的摧毁水平低于软件B和软件A。
试验过程和结果表明,软件B在判断和决策过程中严格依据感知过程信息数据进行决策,导致其在中、高对抗强度的战场态势中全部失效,受数据链误差、定位误差和敌方防空变化的影响,在武器投放前被预警雷达侦测,在低强度的对抗条件下,表现出了明显的攻击行动过程的导向性,达成了较高水平的对目标摧毁能力。
软件A的失效次数均出现在高对抗强度条件的态势环境中,在判断和决策过程中对战场干扰和敌方防空的精度敏感程度介于软件B、软件C之间,其对战场感知和判断模型精度的裕量依旧不够。
软件A和软件C在对战场目标的摧毁能力上与软件B相比稍弱,但攻击过程的失效次数大幅下降,可以根据任务和无人机使用需要进行适应性使用。
5 结 论
1) 通过对无人机攻击流程的分析,将攻击流程划分为感知、判断、决策和行动4个过程,构建实时半实物仿真环境与机载设备交联,对感知、判断和攻击精度建模,形成机载嵌入式软件运行的半实物验证系统。
2) 以任务失效次数和对目标的摧毁能力为评判条件,通过不同战场强度的试验态势条件,验证并分析了3套机载嵌入式软件的工程可行性。
3) 在飞机设计阶段利用半实物仿真验证系统对机载设备进行验证,可以在设备上机前暴露设计缺陷,指导软件的功能分配和适应性调整,进一步优化无人机的OODA打击闭环过程,为攻击流程的工程设计提供支撑。
