三维激光扫描技术在隧道工程监测中的应用
2021-10-16樊经宇
樊经宇
(中铁六局集团太原铁路建设有限公司,太原030000)
1 工程概况
勐绿高速11 标段,起点里程为K167+303,终点里为K179+227,标段内有隧道6 座,单线总长11.924 km,隧道最大埋深694 m,单洞净宽10.25 m,隧道路面设计坡度按1.8%控制,为三心圆断面形式。
隧道内按250~500 m 的间距依次设置人行横洞,道路建筑限界为2 m×2.5 m;另外,按750~1 000 m 的间距依次设置行车横洞,道路建筑限界为4.5 m×5 m。
2 三维激光扫描技术概述
三维激光扫描技术可以将检测范围延伸至被测物体的多个点,确定各点的三维坐标、反射率及三原色等关键的特征信息,由此生成真彩色三维点云模型,给工作人员提供参考依据,以便开展数据分析等相关工作[1]。
2.1 点云数据的关键特点
点云数据的关键特点在于可直接测量各点云的关键信息,包含但不限于三维坐标、方位角。同时,根据点云数据展开计算后,可以确定目标实体的关键参数,如表面积、体积等。因为点云的分辨率较高,具有更为精准的反映能力。
在应用三维激光扫描技术时,受现场空间等因素的限制,所采集的数据相对有限,就某物体的测量而言,单次所测量的数据并不能完全满足需求,即无法完全反映被测物的情况。对此,需从多个视角展开扫描测量,并在得到较为完整的数据后,再对该点云数据总量做筛除、拼接等处理,以打破多个坐标系过于独立的局面,使其可以被转至相同的坐标系内。
2.2 点云数据的拼接方法
1)不仅可以于扫描仪扫描的视场内配备测量标靶,还可以借助不同测站共用的测量公共控制点的方式来实现。
2)确定重叠区域,对该范围内的特征点云采取拼接处理措施,以求得多视点云的拼接参数,从而有效保证拼接精度,规避坐标转换所产生的传递误差。
3)滤波处理是数字信号处理领域的代表技术形式。具体来说,就是在将点云数据视为电子信号的同时,将非标准信号视为噪声,并在此条件下执行滤波处理,从而达到剔除噪声的效果,由此确定正确的、具有参考价值的信号。
2.3 点云数据的价值提高
要提高原始点云数据的利用价值,可采用点云滤波算法,其应用优势在于可以剔除会造成干扰的信息。从学科发展的角度来看,点云滤波算法是在拓扑学基础上经理论衍生后而形成的图像分析学科,核心思想在于确定一系列的“基本单元”(尺寸、形状均与原始图像具有密切的关联),将其与原始图像展开对比分析,进而求得相应的信息,以此作为分析的依据。
对于本工程来说,隧道工程属于空间实体,在展开监测工作时可以应用三维激光扫描技术。因为该项技术具有非接触、高精度特性,能够快速确定海量的空间点云数据;同时,在采取前述所提的拼接方法、点云滤波算法等方式后,可创建三维实体模型,并以此来直观反映隧道的实际情况,从而确保本工程施工的顺利进行。
3 三维激光扫描技术
3.1 基于入射角误差分析的架站间距分析
为减少扫描次数,通常采取增加测站间距的方法。但与此同时,激光入射角将明显增加,进而影响现场扫描数据的精度。由此可见,合理设定测站间距至关重要,必须兼顾较少的扫描次数和较高的数据精度双重要求。
入射角对数据精度的影响较显著,为探寻两者所具备的关联,于2 次衬砌上按1 m 的间距依次稳定粘贴标靶,以测定误差与入射角的数据。在入射角为60°时,误差大幅度增加。
若架站所处位置为隧道中心轴线上,此时入射角所对应的最大测点所处位置为B 点,具有如下关系:

式中,θmax为最大入射角,(°);S 为测站间距,m;D 为隧道内径,m。
根据工程信息可知,D 为12.82 m。结合此数据展开计算,可确定测站最大架设间距S=27.29 m。
3.2 隧道扫描点云整体偏差控制
在三维激光扫描作业流程中,需对标靶点做点云拼接处理,再根据控制点对点云坐标系做出转化操作。通常,在隧道长度较大的基础条件下所取得的测量结果具有较大误差,实测的变形规律与隧道的实际情况有明显区别。
测试结果表明,在常规监测方法下,仅在隧道一端设置控制点时,点云数据在拼接后,会有极为明显的隧道整体偏移情况。
根据隧道扫描数据可知:在采取首端单侧控制点的方法时,尾部整体偏移量明显加大,其中,以B1点较明显,其向B2点的偏移量达到14.6 cm(见图1)。究其原因,与标靶拼接误差累计值有关;而在采用首尾双控的方法后较好地规避了隧道偏移问题。
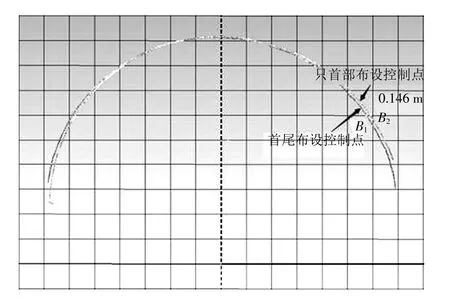
图1 隧道扫描对比
隧道扫描前需要做足准备工作,调整三维激光扫描仪的位置,使其平整、稳定,各测站的局部坐标系Z 轴均与水平面呈垂直的位置关系,坐标体系变换所涵盖的参数包含1 个旋转参数和3 个平移参数。测站间设2 个或更多的拼接标靶,以免在转站期间出现较大的拼接误差。此外,在放置拼接点标靶时遵循相互交错的原则,不可共处于相同的隧道断面上。转站的流程具体要点有以下2 点:
1)测站位置。调整扫描仪的位置,确保其稳定在隧道中心线上,若因条件限制而无法满足该要求,则尽可能减小与中心线的距离;测站处的地基需具有稳定性,以免仪器在运行期间失稳。
2)扫描步骤。将扫描仪及①、②号标靶点架设到位,首先完成对①、②号标靶点的扫描作业,再对隧道做全景扫描,在此基础上将①、②号标靶点前移,使其到达③、④号标靶点处,在完成对隧道整体的全景扫描后进一步扫描③、④号标靶点,详细记录各项扫描的数据,此后按规范新建测站,根据测量要求转移扫描仪,按此方法重复施工,直至全面完成对各区段的扫描工作为止,如图2 所示。
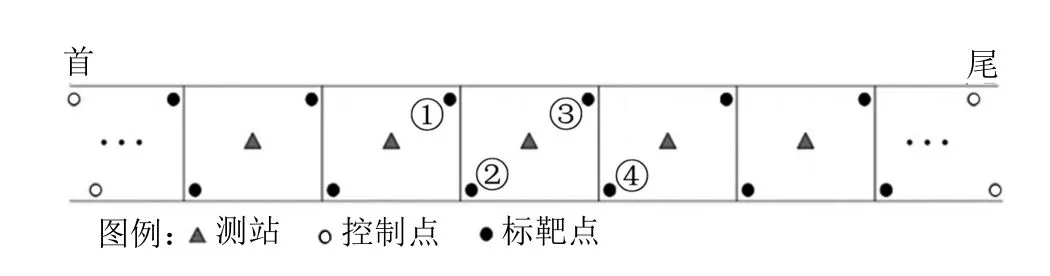
图2 标靶布设方法
4 基于点云的隧道整体变形监测
4.1 三维变形监测
变形监测是隧道施工中的重点工作内容。传统方法是指在围岩或初支处预埋测点,其局限之处在于测点数量有限、测量数据缺乏全面性、难以准确反映隧道的变形情况。而三维激光扫描技术突破了该局限性,可以在提取隧道点云并套接后,可直观地对相邻2 次点云数据展开对比分析,且结果具有真实性。
以20 m 隧道点云为例,取隧道首尾控制点ZN01、ZN02,将其作为2 期点云数据的共同控制点,即2 期点云数据共处相同的坐标体系中。根据隧道的稳定性要求,将5 mm/d 作为变形的上限值,超过该阈值后将触发预警,以红色显示;若被控制在该上限值内,则以绿色显示。通过该两类颜色,可以区分变形量,由此最终得知:在该监测时段内,仅有0.042 6%的点的变形量超过上限值,所处位置以拱顶部位为主,但总体来看隧道具有较良好的稳定性。
4.2 隧道单点面域分析
传统隧道拱顶监测方法经常会使用少量固定的单点。在转站点误差等多方面影响下,单点沉降速率的测定结果缺乏准确性,且易有较明显的拱顶上抬趋势,明显偏离了实际情况。针对此,通过三维激光扫描技术的应用,可以取得三维点云数据,同时此条件下的点间距可以减小至1 mm 左右;另外,需引入正态分布的方法,并对面域点云数据设置合适的置信区间,其中的平均值需能够有效反映拱顶沉降情况,且面域数据的体量丰富,更具有代表性。
也就是说,通过面域点云精度测试的方式,可以确保每日所取面域均具有一致性;而通过设置固定标靶,可以取标靶范围内数据平均值,并将其作为当日拱顶沉降值使用,技术人员可在此基础上针对性分析。以K170+660 为例(距离掌子面约10 m),该范围的监测结果中:监测数据总体呈较稳定的特点,全过程中仅有1 d 存在拱顶上抬现象,且该处的上抬量较小,对隧道稳定性的影响较微弱。
5 基于点云的隧道断面检测技术
5.1 初期支护侵限分析
选取具有代表性的固定断面进行断面轮廓分析工作。在本次分析中,可采用业内主流的Revit 软件,通过三维激光扫描技术的应用创建三维模型,再启用3D Reshaper 软件,将创建成型的模型与初期支护扫描点云嵌套,从中提取完整的初支信息。
以隧道K176+038~+140 段为例,此处将初支侵限阈值设为0,超出该值以红色显示,未超出以绿色显示。从所得结果来看,超挖值在0~30 cm 的占比达到94.7%,超过30 cm 的达到5.3%,且几乎不存在欠挖的情况。
5.2 二次衬砌侵限分析
按照与初期支护相同的扫描方法,可以完成对2 次衬砌的扫描与分析操作。在构建2 次衬砌三维模型后,在此基础上将其与2 衬扫描点云嵌套,以便展开分析。
以K169+850~K170+120 段为例,同样地,此处将2 衬侵限阈值设为0,且该部分的2 次衬砌侵限分析云图中超出该值以红色显示,未超出以绿色显示。最终可知,该段无任何侵限的情况。
6 结语
综上所述,三维激光扫描技术与常规方法相比具有非接触式测量、可高密度采集空间三维点云数据等特点,能利用三维立体全面扫描的优势,实现对检测工程全方位数据的采集和形态的监测。对三维激光扫描技术在隧道工程监测中的应用要点进行分析,希望对相关工作人员提供借鉴。
