基于人工势场的UAV编队避障研究*
2021-10-14朱浩亮陈一新詹茁芃唐世杰李善梅
朱浩亮,陈一新,詹茁芃,唐世杰,马 丽,李善梅
(中国民航大学,天津 300300)
随着通信技术、人工智能以及航空动力技术的发展,无人机技术在生产生活、社会活动等方面被广泛应用[1]。多无人机的任务执行效率与其避障过程中队形的编排和保持有着密不可分的关系。若在飞行过程中,无人机无法合理编排队形并躲避障碍物而与其发生碰撞,不仅无法完成任务,还可能会引发一系列事故。因此,无人机的编队、避障是其顺利完成任务、保障飞行环境安全的关键。
关于无人机编队的避撞问题,国内外的学者都进行了大量的研究并取得了一些成果。其中,常用的避障方法有人工势场[2]、神经网络[3]、最优化理论[4]等。其中,人工势场法是一种路径规划方法,因其实现简单、意义明确、便于计算和实时性好而被广泛应用。这一方法最早是Khatib提出来的一种虚拟力法,使用环境中各点的势场值来反映势场中的障碍物分布及其信息。目前我国针对无人机编队飞行和避撞的研究还处于发展阶段,现有的文献主要是在人工势场法的基础上进行改进和完善。文献[5]在人工势场法的基础上结合距离约束和视线角约束,提出了领航法和改进人工势能相结合的编队方法。文献[6]在改进人工势场的基础上,给出动态环境下避撞的解决方案。文献[7]基于虚拟结构和“长机-僚机”形式,提出一种复合矢量人工势场方法。文献[8]针对人工势场法本身存在的局部最小值问题进行改进,提出了一种新的路径规划方法。
基于上述研究成果,本文首先构建基于雁群模型的无人机编队模型;然后,基于人工势场建立无人机机动参数计算方法,在此基础上,将编队的避撞控制和避撞后的队形保持相结合,建立无人机编队避障流程;最后,通过编制仿真软件,对不同应用场景下的本文所提的无人机编队避障方法进行验证。
1 无人机编队模型的构建
现有的编队模型主要有Boid模型、狼群模型和雁群模型。Boid模型[9]是由Craig Reynolds提出的一种计算机模型,用于模拟动物的群体运动,只要将个体对于周围环境的感知分为三个区域:排斥区域,一致区域以及吸引区域就可以模拟鸟群整体行为的一致性。狼群模型[10]则是建立在狼群捕猎时,将狼分为三个类型:头狼、探狼和猛狼,并将其捕猎行为抽象为3种智能行为(游走行为、召唤行为、围攻行为)以及“胜者为王”的头狼产生规则和“强者生存”的狼群更新机制,以确保以最优的方式捕猎大型动物。雁群模型能够利用空气动力学特性,使得尾随大雁减少能量输出[11]。鉴于此,在无人机编队中,通过采取雁群模型,可减小无人机之间的气动干扰并改变在队形中不同位置上的无人机所受到的力和力矩,从而减少了机群中间位置无人机的飞行阻力,达到降低其耗油量以延长整个编队飞行航程的效果。
本文建立的无人机编队模型如图1所示,由三架无人机和一架虚拟长机组成,三架无人机分别位于等边三角形的三个顶点处,虚拟长机位于等边三角形的几何中心。在无人机编队飞行的过程中,将所有无人机都视为质点来进行研究,虚拟长机的飞行轨迹为编队整体的期望轨迹,虚拟长机受引力作用朝着目标物运动。
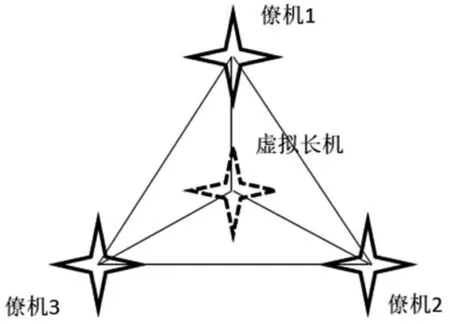
图1 无人机编队模型
2 基于人工势场的无人机机动参数计算
2.1 人工势场的构建
基于人工势场理论,可以认为无人机编队中每架无人机的飞行轨迹受一种复合作用力的影响,即引力和斥力的合力。首先建立无人机编队所在运动平面的二维直角坐标系,分别为X轴和Y轴。然后,将无人机所受到的引力和斥力进行正交分解,投影到坐标轴上求出各自的分量。引、斥力系数假设为不同的常数值。
引力值为引力系数与引力势的乘积,引力在X,Y轴方向的分量为:
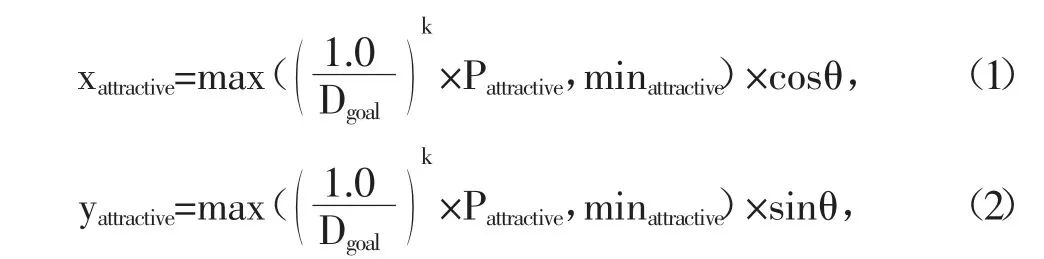
其中k为初始设置的幂指数2,Dgoal为实时计算的无人机距目的地距离,θ为实时计算的无人机与目的地之间的角度,运用atan2函数计算,minattractive为预设的最小引力势,Pattractive为初始设置的引力系数。
斥力值为斥力系数与斥力势的乘积,斥力在X,Y轴方向的分量:

其中k为初始设置的幂指数2,Dobstacle为实时计算的无人机距障碍物距离,ϑ为实时计算的无人机与障碍物之间的角度,运用atan2函数计算,Pobstacle为初始设置的引力系数。
通过公式(1)-(4)可以求出无人机所受到的引力和斥力,合力即为引力与斥力的矢量和。当无人机编队靠近障碍物时,斥力大于引力,斥力占主导作用,该力驱使无人机实施避障机动。
2.2 转向机动参数计算
避障控制器获取无人机编队与障碍物的位置信息后,经过人工势场的计算,产生转向指令,并将其传输给无人机系统的飞行控制器。无人机编队通过调整角度来避开障碍物。

Δα为应采取避撞的调整角度,α为无人机当前运行方向,v为无人机当前运行速度。根据合力分解在X,Y轴方向上的分量,分别计算后重新使用atan2计算方向,与无人机当前方向作差后计算应转向角度。(考虑到无人机性能限制,限制Δα最大转弯角度为10°)
2.3 调速机动参数计算
启动避障控制器后,经过人工势场的计算,还需产生调速指令来控制无人机编队飞行。

其中,ν为无人机当前运行速度。根据合力分解在X,Y轴方向上的分量,分别计算速度分量后重新计算应调整的速度大小。(考虑到无人机性能限制,限制平时运行时最大速度为10m/s,执行避撞和队形恢复过程时最大速度为11m/s)。
3 无人机编队避障流程
无人机在编队飞行时,由虚拟长机与障碍物的距离可以判断无人机群是否需要避障。在整个飞行过程中,虚拟长机一直只受目标点的引力,匀速直线前进。当各僚机与障碍物的距离中出现小于100m的情况,则障碍物对无人机的斥力势场发生作用,各僚机在障碍物产生的斥力和飞行目标点产生的引力下,实施转向、调速等机动飞行,实现避免与障碍物相撞;当避障完成后,各僚机与障碍物的距离均大于100m时,障碍物的斥力作用消失,无人机则在虚拟长机的引力下,回到以虚拟长机为中心的编队中,实现队形保持,继续前进。无人机编队避障的流程如图2所示。

图2 无人机编队避障控制与队形保持流程图
在执行避撞阶段前期,无人机会持续靠近障碍物并达到一个最小值,无人机受斥力影响将会远大于引力,而在避撞阶段后期,无人机会持续远离障碍物,受到的斥力仍远大于引力,导致无人机的航迹将会在避撞过程中呈现圆弧状,直至飞出100m的避撞范围后再进行航迹调整飞向目的地,导致额外的避撞飞行过程,如图3和图4中a线航迹所示。针对该问题给出的优化方案:当无人机与障碍物连线和无人机与目的地的连线夹角大于90°时,认为UAV已经不再具有接近障碍物的趋势,不必再采取避撞措施。仿真结果如图5、图6所示,可以看出,经过优化以后,无人机的航迹(a线航迹)显得更为平滑,避撞航迹更为合理,很好地减少了无人机多余的变速、转向操作,从而有效减少无人机避障路径的长度。
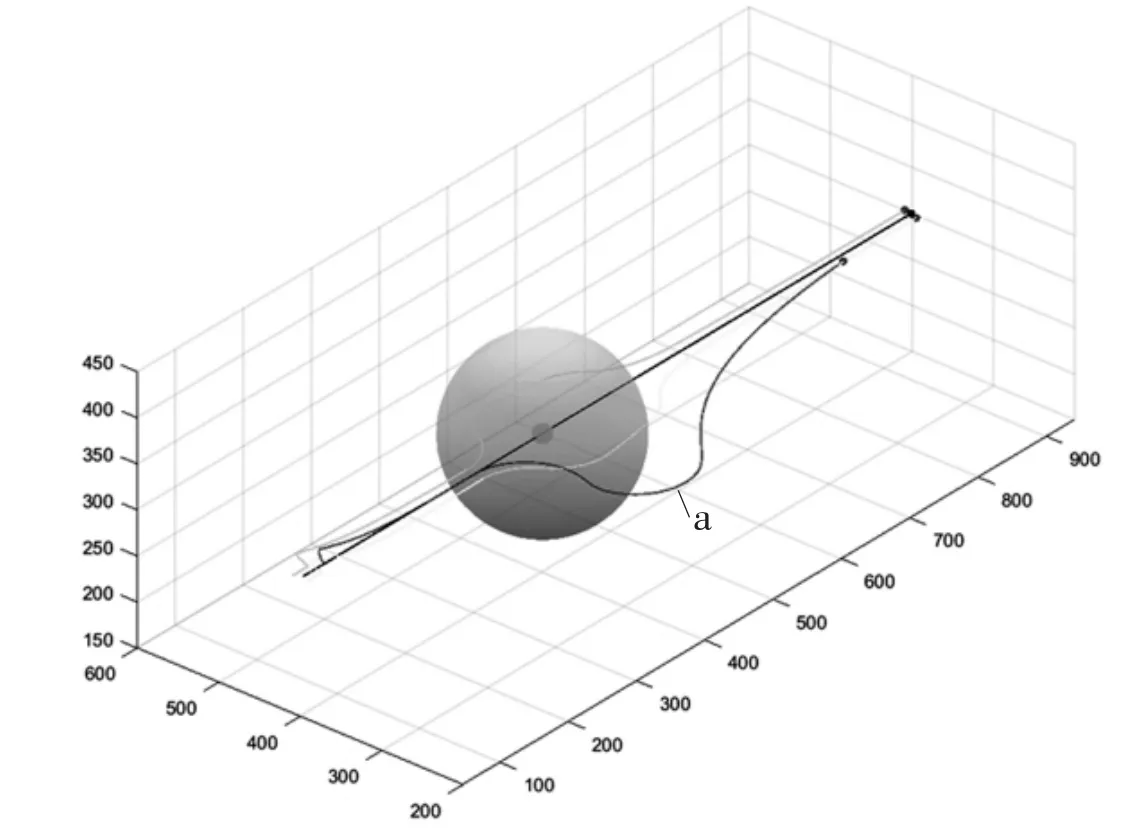
图3 避撞控制-队形保持三维侧视图

图4 避撞控制-队形保持三维俯视图
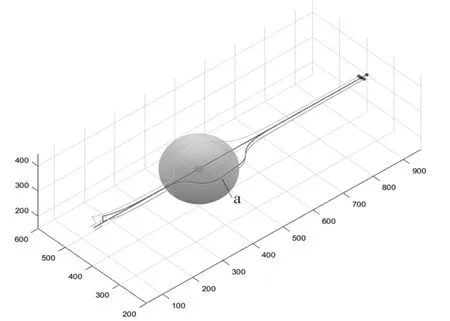
图5 避撞控制-队形保持三维侧视图(优化后)

图6 避撞控制-队形保持三维俯视图(优化后)
4 结束语
本文研究了基于复杂网络理论的无人机冲突探测与解脱问题,运用人工势场算法设计无人机编队飞行的避障控制器和队形保持控制器,并将两种控制器相结合。在有效范围内没有检测到障碍物时,使用队形保持控制器,遇到障碍物时,使用避障控制器迅速避撞,避撞完成后,又能迅速恢复原有编队状态。
在仿真实验中,可以看出本文设计的方法可靠有效,对无人机冲突探测与解脱问题具有一定的参考价值。本文是基于二维平面来进行研究的,在后续的工作中,将会考虑垂直高度上的避障,实现三维空间内的冲突探测与解脱,使算法更加贴近工程实际。
