无人机遥感山区公路图像去噪方法
2021-10-13张少帅
黄 莺,张少帅,黄 鹤,,王 珺 ,茹 锋,
(1.空军工程大学,陕西 西安 710051;2.长安大学,陕西 西安 710064;3.西安市智慧高速公路信息融合与控制重点实验室,陕西 西安 710064)
0 引言
近年来,随着无人机技术的迅猛发展,与遥感技术的结合日渐成熟[1-2]。无人机遥感技术具有侦察方式灵活、体型较小的优点,在山区公路运营监控中应用较为广泛。因此,对无人机图像采集获取的遥感图像处理和分析成为近年来该领域国内外的研究热点。但在飞行过程中采集山区公路遥感图像时,无人机载摄像头难免会受到周围环境及传感器等干扰因素的影响,致使采集、传输和存储时会发生偏差,加重了遥感图像后期处理及分析时的困难。为提升采集遥感图像数据的有效性,后期滤波去噪非常重要。
无人机滤波去噪处理遥感图像时,现有很多滤波算法在工程应用中受到各种条件的限制[3-4],一般都针对噪声分布已知的场景,对应用对象有明确的要求。因此,选择滤波算法在进行滤波去噪时带有很明显的针对性,不能适应多种场景下的滤波去噪处理,尤其在一些特殊行业中。而且,此类滤波器更侧重于信噪比的提升,却忽略了图像的边缘细节信息[5-8]。同时,遥感图像采集的过程中难免也会遭受到很多条件的限制及多类因素干扰,如传感器固有的特性以及周围气候环境对传输设备的干扰,故可能在无人机获取到的遥感图像中有多类噪声并存。而传统滤波算法不能实时灵活处理,导致去噪处理效果通常不理想,无法适应工程实际应用,达不到遥感图像去噪的实时精确性需求。在此基础上,提出了一种可用于无人机山区公路遥感图像处理的自适应开关均中值融合滤波方法,能够兼顾滤波效果和边缘信息的完整性。
1 传统的梯度倒数加权平滑算法
1.1 算法原理
根据图像相关性原理,在任意图像中,灰度值变化有一定区别,各个区域内要小于区域间的灰度变化值,因此,其梯度绝对值会有所区别,具体为图像区域内部的值要小于边缘处的该值。结合该思想出现了传统的梯度倒数加权平滑算法[9]。实现过程中,求解各个中心像素点与邻域的梯度值,判断噪声点则是根据该值与阈值之间的比较。当前像素点是噪声点,则利用邻域均值替换此噪声点;如果不是噪声点,此时基于梯度倒数对该噪声点进行加权平滑。计算区域的梯度绝对值时,区域边缘的值要大于区域内部的值,因此,导致区域内部比外部相邻像素点平滑输出的影响更大。在遥感图像平滑处理时,定义加权系数能很好地保留图像边缘细节信息。算法过程具体如下所述。
设f(x,y)为(x,y)的灰度值,模板大小n=3。模板内选取3×3邻域,定义梯度倒数为
(1)
i,j∈{-1,0,1},但i和j需要满足不同时为0。模板内滤波加权值用式(1)中各点的梯度倒数值表示。如果其中有一邻点的灰度值与中心像素值相等,即f(x+i,y+j)=f(x,y),则g(x,y;i,j)应该在[0,1]范围内。
进一步归一化梯度倒数值[7],并定义矩阵W作为归一化权值,即
W=

(2)
该矩阵中,定义W(x,y)=1/β为位于中心像素f(x,y)的权值,因此,以3×3模板中心点权值可推断模板内其余相邻8个点权值为
(3)
1.2 改进的梯度倒数加权平滑算法
梯度倒数加权平滑算法能较好地滤除噪声,图像边缘保持较完整,但参数β为常数,不能根据局部图像实时调整,即对每一个模块都必须采用同一标准,不能很好地适应图像突变部分。故本文为解决传统梯度倒数加权平滑算法的不足,对其进行改进,增强适应性,将参数β升级为变量βγ,使其能够根据图像局部区域的相关性进行调整,来定义自相关函数R(x,y)。这里,R(x,y)由局部区域求取灰度绝对差值的倒数获得,表达式为
(4)
依据目标大小来求取r值,一般情况下,采用2~5倍目标大小,这里取经验值r=5。与像素f(x,y)具有相同灰度值的像素点,在梯度倒数滤波中的权值为1/β,所以像素f(x,y)的自相关函数R(x,y)的表达式可描述为
(5)
常数c(c>0,下同)的取值要考虑到噪声的影响,本文取经验值c=2。自相关函数R(x,y)的取值越大,即局部区域内图像的相关性越强,参数βγ的取值就越大。将βγ表述为自相关函数R(x,y)的线性增函数,表达式为
βγ=K×R(x,y)
(6)
K为常数,且大于0,本文取经验值K=2。因此,可基于梯度倒数加权将表达式改为
(7)
将式(7)代入式(3)中,用βγ代替β,得到新的归一化权值。则当前像素点的输出为

(8)
2 自适应开关均中值算法
2.1 传统算法
传统开关均中值滤波算法的数学表达式为
q(x,y)=
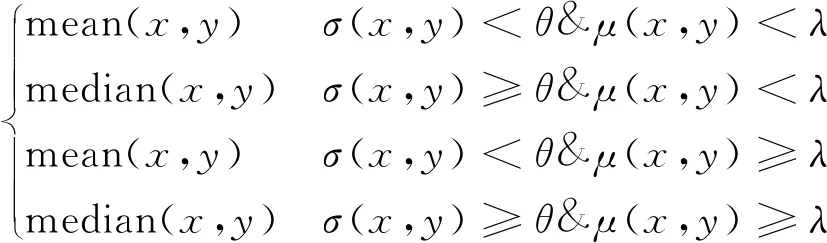
(9)
σ(x,y) 为图像中发生灰度偏移的值;μ(x,y) 为灰度差值;f(x,y) 为灰度值。median(x,y)为邻域中像素点的中值灰度值;mean(x,y)为邻域间像素点的灰度值均值;在使用开关均中值滤波去噪处理后,q(x,y)为(x,y)点处的灰度值;参数θ和λ分别为开关中、均值阈值。基本思想为:
a.当满足式(9)中σ(x,y)<θ&μ(x,y)<λ条件时,开关均中值滤波认定其非噪声,但仍有少部分噪声存在,此种情况选择开关均值滤波为当前最优方案。
b.若式(9)满足条件σ(x,y)≥θ&μ(x,y)<λ,此时,开关中值滤波检测到该点是噪声点,而此时采用开关均值滤波时并非把该点当噪声点处理,二者综合考虑,判定其仍为噪声,因此,对噪声点处理的最好方式即采用开关中值滤波处理。
c.若式(9)满足条件σ(x,y)<θ&μ(x,y)≥λ,此时,开关中值滤波鉴定其不属于噪声,而开关均值鉴定其属于噪声,因此,综合开关均中值滤波器认为是噪声,并采用开关均值滤波对其进行处理。
d.若式(9)满足条件σ(x,y)≥θ&μ(x,y)≥λ,此刻开关中、均值滤波均认定该点属于噪声,再者像素点满足上述条件时,邻域内对像素点进行灰度值计算时有些许偏差,倘若当前直接采用开关均值滤波去噪时误差会偏大,影响滤波效果,因此,选定最优方案为开关中值滤波算法。
2.2 自适应开关均中值算法
开关均中值滤波的传统算法[10]所取的阈值λ和θ最大,满足q(x,y) =f(x,y),两者相等,灰度值没有任何变化,即未做处理。而λ和θ都取0,此时像素点处有q(x,y)=median(x,y),此时的像素点灰度值与中值灰度值相等,表示进行了中值滤波。参数λ取最大值,阈值θ取0时,则q(x,y)=median(x,y),即此时使用中值滤波对原图像操作;若阈值θ取当前最高值,阈值λ取0时,此时有q(x,y)=mean(i,j),即均值滤波处理该图像。因此,由阈值分割来决定滤波算法是传统开关均中值滤波算法[11]的核心思想,对像素点的滤波作用较明显。
传统中、均值滤波算法直接确定阈值,滤波过程比较单一,每个子块按照同样的标准处理,方式比较粗糙,容易产生2种极端情况:一是噪声小的区域滤波强度过高;二是噪声大的区域滤波强度不够。为解决此问题,本文提出自适应开关均中值滤波算法,采用自适应阈值取代传统固定阈值方式,即自适应选取阈值θ和λ。针对图像模板获取中心处的像素点与周围像素点,计算梯度绝对值中值,即为λ。然后定义为θ′,取λ=500θ′。采取自适应阈值的方式可以有效地避免滤波时去噪不足或过度去噪的现象,同时保留边缘细节。
3 改进算法
改进的梯度倒数加权平滑算法在图像边缘保持方面效果良好,但平滑效果不乐观,具体表现为针对不同类型噪声污染时处理效果较差。其根本原因是选取的模板中,W(x,y)易受到中心点像素点灰度值f(x,y)的影响,若中心点刚好是噪声点,那么中心点邻域范围内的所有点加权值则较小,输出值的调整在对q(x,y)滤波处理后幅度也较小,所以对脉冲和椒盐噪声滤波效果较差。而自适应开关均中值滤波算法针对脉冲、椒盐噪声去除效果较为明显,但却不能保留遥感图像边缘的细节,致使滤波结果也不理想,图像平均梯度明显下降。
为使上述问题得到有效解决,本文提出一种基于梯度倒数自适应开关均中值的改进图像滤波去噪算法。在图像的固有属性中,相邻像素点之间是存在灰度值大小接近这一理论是有依据的,在连通性原理中得到了解释。在n×n的平滑模板中,设定阈值T,并计算像素点(x,y)和其他像素点(x+i,y+j)之间的梯度值。本文算法规定,任意一个属于中心附近的像素点与阈值T比较,若小于或等于T的梯度值绝对值,则判定像素点f(x,y)与脉冲或随机噪声无关。当前情况下,改进梯度倒数加权算法对该像素点滤波处理效果达到最佳;在模板中,若阈值T小于任何像素点梯度绝对值,则判定该像素点受到椒盐或其他噪声污染,此种情况下,采用自适应开关均中值算法处理能达到最优化的结果。具体操作如下:
a.选取模板n×n,并在g数组中保存模板中心像素点(x,y)与相邻像素点(x+i,y+j)之间的梯度绝对值的倒数。
b.对阈值T的大小进行设定。结合当前滤波点f(x,y)的灰度值,阈值T的取值为T=f(x,y)×1%。
c.设定标志数组g,标记模板内各个邻近点与中心点超过阈值T的梯度值。如果超过,取值为1;否则取0。通常为了判断方便,中心点(x,y)的值对应取1。
d.若当前像素点取值满足g(x,y)=1,则用自适应开关均中值滤波算法进行计算处理,即采用式(9)方法,当前中心像素点(即噪声点)的输出点为模板中的q(x,y);否则,对模板内各像素处理方式采用非噪声点的输出,即采用式(8)中q(x,y)表示。
e.利用滤波模板遍历整幅含噪图像,重复步骤a~步骤d。若滤波后的像素灰度值超出[0,1]范围,则对于小于0的像素点灰度值取0,超出1的取1。
4 结果与分析
本文实验的实验数据是无人机航拍的617×346的公路遥感含噪图像,针对该无人机航拍的遥感图像,采用自适应开关均中值算法、改进梯度加权倒数平滑法,以及本文提出的基于改进梯度倒数自适应开关均中值遥感图像融合滤波算法进行滤波去噪处理,结果如图1~图5和表1所示。

图1 原始图像

图2 加噪图像

图3 自适应开关均中值滤波后的图像

图4 改进梯度倒数滤波后的图像

图5 本文算法滤波后的图像
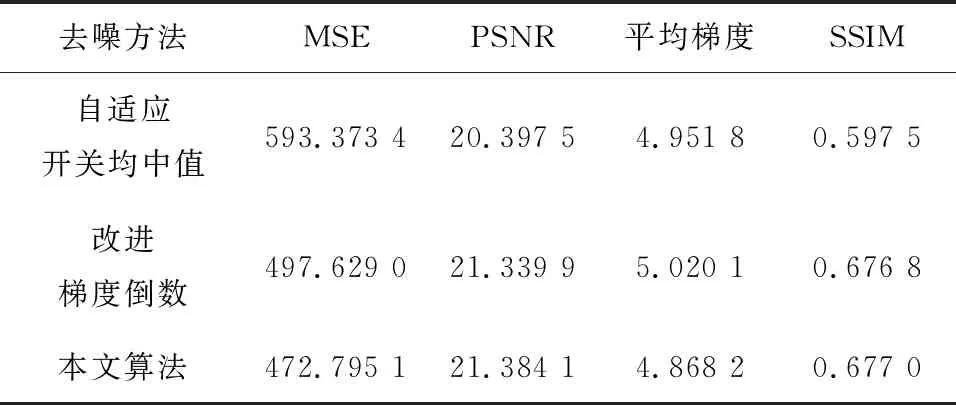
表1 实验结果参数对比
图1为原始的遥感图像,图2为添加噪声后的遥感图像,图3为自适应开关均中值滤波算法滤波后的图像,图4改进梯度加权倒数平滑方法的效果,图5为本文算法滤波后的图像。结合表1,则可以通过几种算法的参数分析结果获得如下信息:对比图3和图4,改进梯度倒数加权算法滤波处理效果比自适应开关均中值算法更好,平均梯度、峰值信噪比(PSNR)、MSE都有提升,且结构相似度SSIM高于自适应开关均中值的13.27%,边缘保持效果比较好,但是去噪效果较差。对比图5与图3、图4,本文算法结合了改进梯度倒数加权算法与自适应开关均中值算法两者的优势,既能很好地去除各种类噪声,同时对无人机遥感图像边缘信息保持较好。表1实验结果参数可以发现,本文提出的融合滤波算法,滤波后PSNR、MSE、SSIM 等指标均优于其他对照算法,其中MSE减少了约5%。根据图3~图5的SSIM与平均梯度指标,图3和图4没有将噪声滤除干净,导致平均梯度高于图5,但较传统滤波算法提高了3.16%。综合来看,本文算法的综合滤波效果最好。
5 结束语
本文提出了一种基于无人机遥感山区公路图像去噪方法,结合改进梯度倒数加权平滑算法和自适应开关均中值滤波算法各自的优点,实现去噪与边缘细节保持功能并举。通过与传统方法的实验效果相比较,本文算法的MSE、PSNR和平均梯度等参数均有提高,达到了较好的滤波去噪效果,在无人机遥感图像去噪方面应用价值显著。