光伏电站半波与全波有功注入阻尼技术研究
2021-10-13汪宗恒熊鸿韬尚磊
汪宗恒,熊鸿韬,尚磊
(1.杭州意能电力技术有限公司,杭州 310014;2.国网浙江省电力有限公司电力科学研究院,杭州 310014;3.武汉大学电气与自动化学院,武汉 430072)
0 引言
近年来,以风电、光伏为代表的清洁能源发展迅猛,在电力系统中的比重逐渐升高。然而,大规模风电、光伏并网也对电力系统的安全稳定带来了诸多挑战。2015 年,西班牙一光伏电站发生25 Hz含谐波的功率振荡[1];2019年,内蒙古一光伏电站母线电压发生低频振荡[2]。随着大容量风电场、光伏电站的规划建设和运行,浙江地区电网中新能源发电所占比重逐步提升,同时电网受电比例不断提升,导致常规机组运行数量和容量都不断减少,在节假日尤为明显,电网出现功率振荡的风险越来越大。2019 年“十一”期间浙江省台温地区就出现了较大幅度的低频振荡,对电网安全稳定运行产生了较大的影响。新能源并网引入的系统性低频振荡问题引起了业界和学术界的广泛关注[3-6]。
但是,新能源电站与常规能源存在很大的不同。对于光伏场站参与系统低频振荡影响方面的研究,静态潮流方面,文献[7]针对接入电网的光伏单机无穷大系统,通过特征值法分析发现改变光伏输出功率可以增加同步机机电模式阻尼,从而抑制低频振荡;动态控制环节方面,文献[8]采用特征值法分析光伏自身的振荡模态,发现电压控制和d 轴电流控制参数对系统低频振荡频率和阻尼比均有较大影响。文献[9-10]利用电气转矩法分析了光伏场站静态功率注入对同步机组惯量水平及机电阻尼特性的影响。在以上特征值法分析或转矩分析的基础上,文献[11-13]采用极点配置法、文献[14]采用鲁棒控制和相位补偿法给出了阻尼控制参数的设计原则。这些文献提出的阻尼控制往往基于整个系统的状态空间信息分析,对于大型系统来说模型阶数高,相应参数设计也较复杂。
本文提出“增益+滤波+相位补偿”的光伏电站全波和半波注入控制,在光伏电站减载和最大功率跟踪运行工况下抑制电力系统低频振荡。介绍光伏电站有功注入阻尼控制基本原理和阻尼控制器设计、分析控制参数影响的基础上研究阻尼效果,得出相关结论。
1 光伏电站注入阻尼控制原理
注入阻尼控制本质是通过调节光伏本地的出力或电压状态,来间接调节同步发电机电磁功率输出来抑制其频率变化[15]。
具体地,有功补偿注入阻尼基本设计思想分别为:假设频率正半波振荡时,需要提高同步发电机出力来降低转速(即频率),对应可以减小光伏出力;反之,频率负半波振荡时,需提高光伏电站出力来降低同步发电机出力,从而增大同步发电机转速。因此,可以构建在低频振荡频率处频率输入-有功输出的负的比例环节[16]来增大低频振荡阻尼。
光伏电站通常工作在最大功率跟踪模式下,无多余能量阻尼系统振荡。因此,为实现有功阻尼注入阻尼控制策略,在光伏电站增加储能系统或者预留一定的功率备用[17],在振荡波形正负半波均可实现阻尼控制,称为全波阻尼。若不增加储能或预留功率备用,光伏电站只能在正半波振荡时减少光伏出力实现阻尼控制,称为半波阻尼,如图1所示。
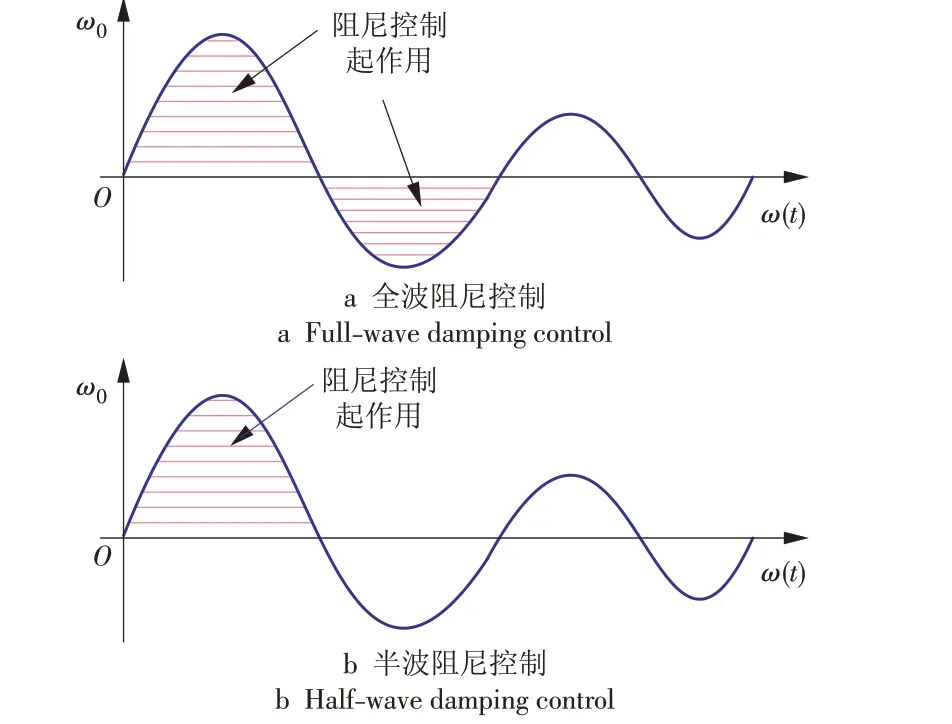
图1 半波阻尼与全波阻尼控制Fig.1 Half⁃wave and full⁃wave damping control
2 光伏电站阻尼注入控制设计
为抑制电网的低频振荡,基于光伏系统提出一种基于“增益+滤波+相位补偿”的低频振荡阻尼控制结构,是最为简单的一种阻尼控制结构,物理概念清晰。所提出的阻尼控制基本结构如图2所示。

图2 阻尼控制器控制原理Fig.2 Working principle of the damping controller
阻尼控制器的数学表达式为

式中:s为微分算子;K为阻尼控制增益参数;T为滤波环节时间常数,s;T1,T2为相位补偿环节时间常数,s;sT/(1+sT)是高通滤波器环节;(1+sT1)m/(1+sT2)m为相位补偿环节。阻尼控制参数整定主要涉及以上3个环节关联的参数。
增益参数K的选取直接影响阻尼效果的强度,需考虑以下2 个方面:(1)补偿控制有功/无功容量的约束,例如配置了储能系统的光伏发电站,补偿控制叠加的上调功率不能超过储能的容量,无功补偿也需控制机端电压的波动范围;(2)阻尼控制引入模式的自身稳定特性,类似电力系统稳定器增益设计,可忽略与同步发电机间耦合,考虑单机接入无穷大系统不同短路比下,阻尼控制回路稳定边界对应的增益上界,并留一定裕度得到K的范围。
高通滤波器的作用是隔离直流环节,使得补偿控制仅在动态过程中起作用。因此滤波时间常数T选取需保证直流及超低频频段信号的衰减足够,且尽量不影响低频振荡频段(0.2~2.5 Hz)信号,T的值应尽量小,建议取值范围为0.5~1.0 s。
相位补偿环节作用是调制整个阻尼控制环节在低频振荡频率处的相移,以保证阻尼控制环节尽量提供正的阻尼作用。依据补偿角度φ的需求,相位补偿可取1到2级,即m可取1或2。根据经验,建议以补偿角30°为边界,补偿角φ≤30°时m取1,φ>30°时m取2。相位补偿环节需要补偿的角度为频率测量、滤波环节和高通滤波器3 个环节传递函数在特征根λi的振荡频率处的相移。根据超前-滞后相位配置的公式[18],得

3 控制参数的影响
依据阻尼转矩系统来判断评估不同参数的阻尼效果。阻尼转矩系数具体计算方法如下:计算系统特征根λi;再计算特征根λi对应的振荡频率ωi;将振荡频率jωi代入频率‐功率方程,对应的实部就是阻尼转矩系数。
3.1 控制增益的影响
改变有功补偿注入阻尼增益,可以得到不同增益下的系统阻尼转矩系数曲线如图3 所示。由图3可见,在该工况下加入有功补偿注入阻尼后,在系统振荡频率处,随着阻尼控制器增益的增加,阻尼转矩系数明显增大,系统阻尼转矩系数曲线向上移动,从K=0 时的4.9 增加到了K=0.83 时的11.2,说明系统稳定性增强。
在时域仿真模型中,改变控制器增益参数,得到不同增益下的并网点功率的时域仿真波形如图4所示。由图4可见,改变控制器增益参数后,随着阻尼控制器增益的增加,并网点传输功率曲线超调逐渐减小,稳态时间变快,说明系统阻尼变大,与阻尼转矩系数分析结果相符。
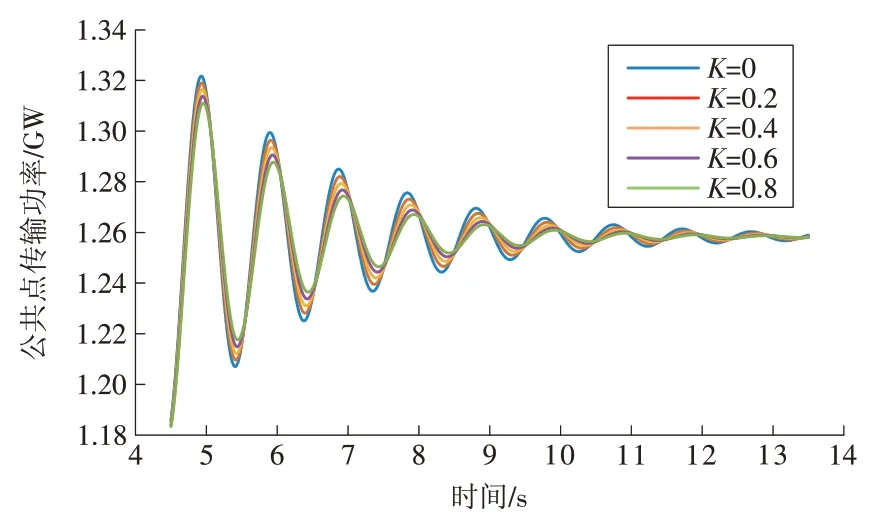
图4 基于有功补偿注入阻尼控制的不同增益下功率曲线Fig.4 Power curve under different gain of the damping control based on active power compensation injection
3.2 电气距离的影响
研究分析不同电气距离下阻尼控制器的阻尼效果。同步发电机到并网点线路长度l1为5 km,并网点到无穷大电网线路长度l3为10 km。光伏采用功率和电压控制,即根据指令调节自身输出的有功功率及控制交流端电压。分析当光伏电站与并网点电气距离l2分别为1,30,60,80 km 时系统阻尼转矩系数变化情况。此时系统的振荡频率为0.75 Hz,线路阻抗为0.001 4 H/km。
改变光伏电站与并网点的电气距离,可得到不同电气距离下系统阻尼转矩系数曲线,如图5所示。由图5可见,在该工况下加入有功补偿注入阻尼后,在系统振荡频率处,随着光伏与电网的电气距离增加,阻尼转矩系数明显增大,系统阻尼转矩系数曲线向上移动,从1 km 时的4.2 增加到了80 km 时的6.1,说明电气距离越远有功补偿注入阻尼产生的效果越好。
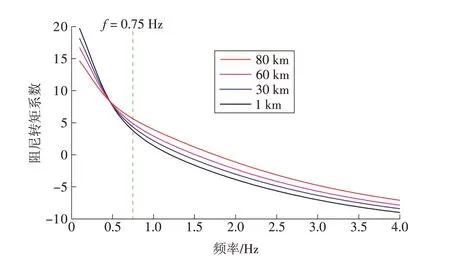
图5 基于有功补偿注入阻尼控制的不同电气距离下系统阻尼转矩系数曲线Fig.5 Damping torque coefficient curve of the system under different electrical distance and the damping control based on active power compensation injection
在不同电气距离下,通过Prony 分析得出系统附加有功阻尼控制的阻尼比及阻尼变化量见表1。由表1可见,在不加阻尼控制器的情况下,光伏电站距离公共点距离越远,系统的阻尼比越大。在附加有功补偿注入阻尼后,随着电气距离从1 km 增大到80 km,阻尼比从0.070 9 增大到0.079 9,但有功的阻尼变化量,即附加有功阻尼控制后与不加控制器的阻尼对比,从0.016 3减小到0.008 2,意味着随着电气距离增大有功补偿注入阻尼的作用效果减弱。综上所述,不同电气距离下,光伏阻尼控制均能提高低频振荡阻尼。电气距离越远,有功阻尼效果会变弱,无功阻尼效果下降较显著。
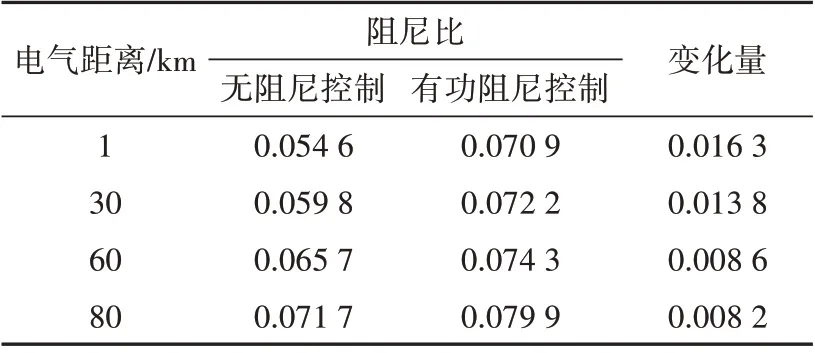
表1 不同电气距离下的阻尼比变化Tab.1 Damping under different electrical distance
4 案例分析
为验证阻尼控制策略的有效性,在MATLAB 中建立了含光伏的2区4机系统,如图6所示。系统设置为:#1—#4 发电机端电压为1 p.u.(以230 kV 线电压有效值为基准),各发电机组有功出力分别为:P1=900 MW,P2=700 MW,P3=800 MW,P4=900 MW;考虑恒功率负荷,2 组负荷分别为:PL1=1 465 MW,QL1=50 MV·A(以吸收感性无功功率为正);PL2=2 400 MW,QL2=50 MV·A。在3.0 s时加入阻尼控制器。
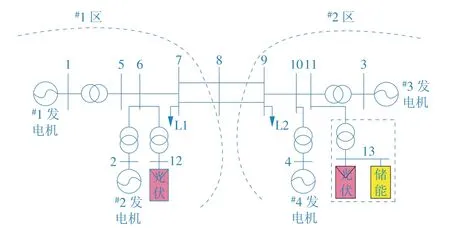
图6 含光伏的2区4机系统Fig.6 Four⁃machine two⁃area power system with photovoltaic generators
仿真分析中,对比了光伏电站无阻尼控制(场景1)、光伏电站配备储能时的全波阻尼控制(场景2)及光伏电站无储能无备用时的半波阻尼控制(场景3),见表2。

表2 运行场景Tab.2 Operation scenarios
4.1 全波阻尼与半波阻尼效果对比
全波阻尼控制下联络线功率振荡及光伏出力如图7 所示。加入全波阻尼注入控制后,系统振荡阻尼增强。半波阻尼控制下联络线功率振荡及光伏出力如图8 所示。加入半波阻尼注入控制后,系统振荡阻尼增强,但阻尼增强程度不如全波阻尼控制。在全波和半波阻尼控制中,光伏发电实际有功功率出力与全波有功阻尼注入控制器输出刚好反相,与之前理论分析结果完全相符。
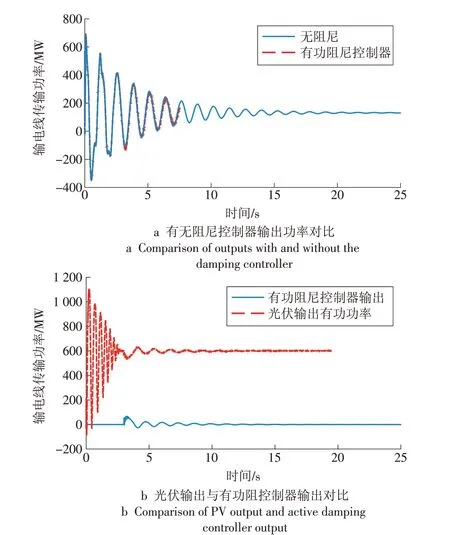
图7 全波阻尼控制下联络线功率振荡及光伏出力波形Fig.7 Tie line power oscillation and photovoltaic output waveform under full⁃wave damping control

图8 半波阻尼控制下联络线功率振荡及光伏出力波形Fig.8 Tie line power oscillation and photovoltaic output waveform under half⁃wave damping control
无阻尼、全波阻尼及半波阻尼控制作用下,系统特征根和阻尼比变化情况见表3。对比可看出,加入全波阻尼及半波阻尼控制后,系统阻尼增强,阻尼比从未加阻尼时的0.048 6分别增加至0.058 8和0.055 7,全波阻尼控制效果优于半波阻尼控制。

表3 全波阻尼与半波阻尼效果对比Tab.3 Suppression effects of full⁃wave damping and half⁃wave damping
4.2 振荡频率变化时阻尼效果
系统实际频率会根据系统运行方式改变而改变,因此通过改变系统中同步发电机转动惯量以改变系统振荡频率。本系统低频振荡的振荡频率发生偏移,从约0.76 Hz 增加到约0.96 Hz。不同振荡频率下联络线功率振荡波形如图9 所示。由图9 可见,加入全波和半波阻尼注入控制后,系统振荡阻尼均有所增强,说明阻尼控制起到了良好的抑制振荡效果。

图9 不同振荡频率下联络线功率振荡波形Fig.9 Tie line power oscillation waveform under different oscillation frequency
无阻尼、全波阻尼及半波阻尼控制作用下,系统特征根和阻尼比变化情况见表4。由表4可见,加入全波阻尼及半波阻尼控制后系统阻尼增强,阻尼比从未加阻尼时的0.026 1 分别增加至0.041 4 和0.038 7,全波和半波阻尼控制在振荡频率发生较大偏移时仍然能起到良好阻尼效果,说明本文所提出的全波/半波阻尼控制设计方法的正确性和有效性。
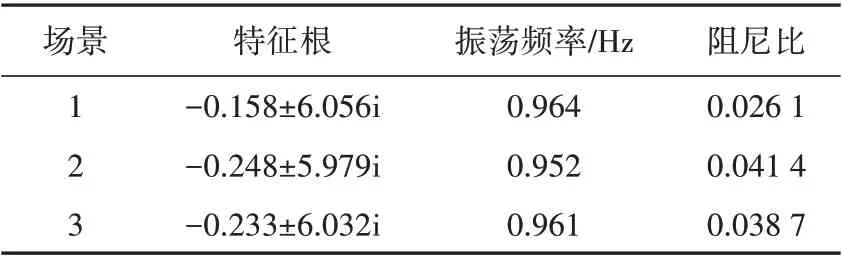
表4 不同振荡频率下特征根及阻尼比Tab.4 Eigenvalue and damping ratio under different oscillation frequency
5 结论
提出一种适用于光伏电站的注入阻尼控制方法抑制系统的低频振荡。阻尼控制策略为半波/全波有功注入阻尼控制,通过检测光伏场站端口频率来调节其输出有功,从而间接抑制系统低频振荡频段的功率波动,具有较好的鲁棒性。分析了2 种阻尼控制的效果,全波阻尼控制要求光伏电站减载备用或配置储能装置,增加了成本,但抑制低频振荡能力更强;半波阻尼控制可在最大功率跟踪条件下实现阻尼控制,但只在减少有功半波起到阻尼效果,抑制低频振荡效果会减弱。通过改进2 区4 机系统的时域仿真验证了该方法的正确性与有效性。