基于虚拟旋转坐标系的瞬时功率因数检测及补偿方法
2021-10-13章军华姜瑶瑶粟忠来
芦 浩,章军华,姜瑶瑶,粟忠来
(1.国网浙江淳安县供电有限公司,浙江 淳安 311700;2.淳安县电力实业有限公司,浙江 淳安 311700;3.许继集团有限公司,河南 许昌 461000)
0 引言
电力系统中较低的功率因数将影响电力系统的经济、安全可靠运行[1-3]。对于供电稳定性要求较高的制造设备,功率因数的变化将直接影响其制造精度及产品合格率,因此稳定电力系统的功率因数极其重要。在输配电系统中提高功率因数的设备主要有固定电容器与动态补偿器[4-7],其中动态补偿器具有响应速度快、补偿效果好及补偿多样性等优点,目前已经得到广泛应用[8-11]。
功率因数的实时、准确检测,是动态补偿器快速、高精度补偿的前提[12-14]。目前,动态补偿器提高功率因数的主要手段是无功功率的补偿。动态补偿器无功功率检测方法主要有:基于瞬时无功功率理论的谐波检测方法和基于时域的TTA(测度时间增强)谐波检测方法[15-16]。基于瞬时无功功率理论的无功功率及谐波检测方法需要对电压进行锁相,运算量较大,造成检测延时较大,从而影响无功功率跟踪补偿效果,而且锁相精度也直接影响无功检测的精度[17]。基于时域的TTA谐波检测方法动态响应较快,可以检测出多种分量[18],但是仍然需要电压锁相环节,无法避免电压畸变以及电压锁相精度低造成谐波检测精度降低的问题。以上两种方法均是通过无功功率检测和补偿间接提高功率因数,并未给出功率因数实时检测及恒定功率因数补偿的方法。在矿热炉、黄金冶炼、电解铝等行业,设备制造工艺对功率因数较为敏感,功率因数改变时需要调节进料速度及电极间距等参数[19]。传统补偿算法尽管可实现较高功率因数,但是实时波动的功率因数将对制造精度及产品合格率造成较大影响,因此恒定的功率因数补偿极其重要。
本文提出一种基于虚拟旋转坐标系的瞬时功率因数检测及补偿方法。首先,介绍将负载电流和系统电压信号分解到虚拟旋转坐标系的方法,并给出瞬时功率因数实时检测方法,此过程省去电压锁相运算环节,避免了电压畸变以及电压锁相精度低造成谐波检测精度降低的问题。其次,以恒定的功率因数作为控制目标,获得补偿的实时电流值,动态补偿器根据该实时电流值进行相应补偿后可实现瞬时功率因数补偿。然后,对补偿后的系统电流进行瞬时功率因数检测,以恒定的功率因数作为控制目标进行闭环控制,从而实现恒定的功率因数控制。最后,结合理论计算、仿真分析和工程应用实例,对所提方法的正确性进行验证。
1 传统功率因数检测及补偿的原理
目前动态补偿器常采用以三相电路瞬时无功功率理论为基础的ip-iq检测方法作为提高功率因数的方法,其原理如图1 所示。该方法需要用到与ea同相位的正弦信号sin ωt、余弦信号-cos ωt和PLL[20],因此检测精度受PLL 精度、处理器运算速度等因素影响。并且该方法并未给出功率因数实时直接检测及恒定功率因数补偿的方法,并不适用于恒定功率因数补偿的场合。
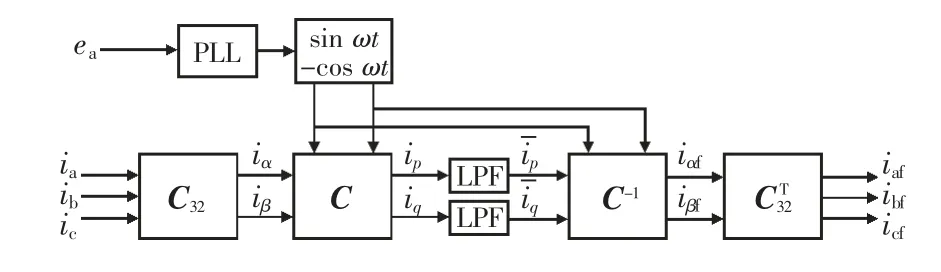
图1 ip-iq 检测方法的原理框图
2 虚拟旋转坐标系的功率因数检测及补偿方法
2.1 虚拟旋转坐标系的建立
设瞬时电流为i,虚拟旋转坐标系由p1,q1轴组成,基波旋转角频率ω1=2πf1(f1为基波频率),p1轴与α 轴的虚拟旋转夹角为θ1。将瞬时电流i分解到αβ 坐标系获得iα,iβ,分解到虚拟旋转坐标系获得i1p,i1q,如图2 所示,其中,i1pα,i1qα分别为i1p和i1q在α 轴的分量,i1pβ,i1qβ为分别为i1p和i1q在β 轴的分量。

图2 虚拟旋转坐标系
2.2 瞬时功率因数检测及补偿方法
虚拟旋转坐标系的瞬时功率因数检测及补偿方法原理如图3 所示,其中的量符号均在后文计算中进行说明。首先,利用基波频率f1、时间t 构造旋转角θ1及变换矩阵C1,提取三相负载基波正序电流。然后,根据负载基波正序电流实时计算负载功率因数FL、有功电流ILp、无功电流ILq进行。然后,根据负载相关瞬时值FL,ILp,ILq和目标功率因数Fref进行功率因数控制,并获得动态补偿器的补偿指令。整个检测过程无需电压锁相环节,避免了锁相精度引起的检测精度问题,并且以目标功率因数作为控制目标可实现功率因数的恒定控制。最后,为了降低动态补偿器输出误差造成补偿后的功率因数与目标功率因数偏差问题,该方法中还加入了系统功率因数检测及闭环控制环节,可进一步提高恒定功率因数补偿精度。
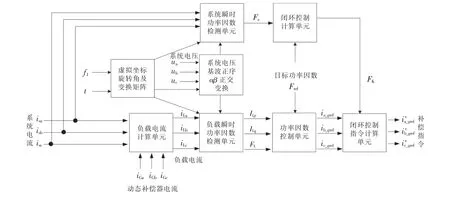
图3 虚拟旋转坐标系的检测方法原理框图
p1轴与α 轴的虚拟旋转夹角θ1计算公式为:

式中:θ0为初始相角,可以为任意值,与系统电压锁相角无关。
虚拟旋转坐标系变换矩阵C1可表示为:

由系统瞬时电流isa,isb,isc和动态补偿器输出瞬时电流iGa,iGb,iGc可计算出三相负载瞬时电流iLa,iLb,iLc。
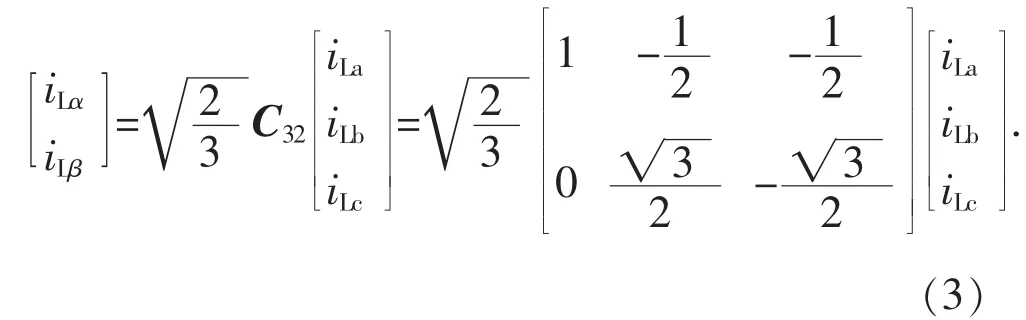
三相负载瞬时电流iLa,iLb,iLc由Clark 正 变换C32转化到αβ 静止坐标系,转换方法为:
将αβ 坐标系获得的分量经过虚拟旋转坐标系变换矩阵C1转化到虚拟旋转坐标系的p1,q1轴,从而获得正序分量i1p,i1q:

i1p,i1q分量由直流分量与谐波分量组成,经由低通滤波后可得直流分量可计算负载电流正序幅值IL1:
同理,可获取三相系统电压在αβ 坐标系下的基波分量u1αf,u1βf。
结合瞬时无功功率理论[12],由负载电流基波分量i1αf,i1βf与系统电压基波分量u1αf,u1βf可计算负载瞬时有功功率PL和瞬时无功功率QL:

由PL,QL可计算负载瞬时功率因数FL:

为了进行恒功率因数补偿,由式(5)和式(9)可计算出负载有功电流幅值ILp和无功电流幅值ILq:
根据负载相关瞬时值FL,ILp,ILq和目标功率因数Fref可计算恒定功率因数控制的实时控制量Iqref:
式中:Iqrem为恒定功率因数控制后系统剩余无功电流。
为了获得动态补偿器瞬时控制指令,由实时控制量Iqref与系统三相锁相角可以转换成瞬时可控制量ia_qref,ib_qref,ic_qref[20]。
为了降低动态补偿器输出误差造成补偿后的功率因数与目标功率因数偏差问题,补偿方法中加入了闭环控制。根据式(3)—(9)可计算补偿后系统瞬时功率因数Fs,Fs与目标功率因数Fref进行PID 或模糊PID 等控制后获得闭环调节控制量FK,闭环控制后的动态补偿指令为:

通过以上方法可获得负载侧与系统侧的瞬时功率因数的实时检测以及恒定功率因数补偿的闭环控制指令,动态补偿器利用该指令跟踪补偿后可实现稳定功率因数的目的。
2.3 瞬时功率因数检测方法的分析
设三相电压瞬时值ua,ub,uc可表示为:

式(19)与式(5)计算的基波正序幅值结果一致。
将式(18)按式(7)反变换后可获得αβ 坐标系下的负载电流基波分量i1αf,i1βf:

同理,由式(3)—(7)可获取三相系统电压在αβ 坐标系下的基波分量u1αf,u1βf:

由式(8)—(9)可计算瞬时功率因数FL:

由式(22)可知,通过理论分析,本文瞬时功率因数检测方法可实时检出基波正序功率因数。
通过式(14)—(22)进一步分析可知:
(1)该检测方法中无电压锁相环节,虚拟旋转角θ1无需与系统电压保持同相位(相位差θ0可取任意值),即可实现瞬时功率因数的实时计算。
(2)该方法的分析中电压与电流均叠加了各次谐波和负序分量,经过虚拟坐标变换后,可以获取αβ 坐标系下的负载电流基波分量i1αf,i1βf和电压基波分量u1αf,u1βf,最终计算的瞬时功率因数为基波正序的功率因数。系统中负序分量和谐波分量可通过动态补偿器进行补偿,最终系统中将只剩下正序有功和无功分量,因此目前动态补偿器提高功率因数时通常只需考虑基波正序无功功率和基波正序功率因数。本方法检测的功率因数为基波正序的功率因数,对于畸变场合该方法仍然可以作为动态补偿器瞬时功率因数检测和治理的方法。
海绵城市是指城市如同海绵一样,在蓄水方面可以体现出良好的弹性,该理念是在2012年低碳城市论坛上首次被提出。我国古代的坡搪系统、三角洲的桑基鱼搪系统等体现了人类的生存智慧:将水作为财,就地蓄留、就地消化旱涝问题,“海绵”的哲学即是就地调节旱涝。开展海绵城市建设是解决目前我国城市水环境面临的“逢雨必涝、雨停即旱”、雨水径流污染、水资源短缺等问题的有效涂径。
3 仿真验证
利用MATLAB 搭建10 kV 链式STATCOM(静止同步补偿器)仿真模型验证上述方法,模型主要参数:系统电压10 kV,频率50 Hz,0 s 时投入负载1(有功功率2 MW,感性无功功率1.5 Mvar),0.18 s 时投入负载2(有功功率2 MW,容性无功功率3 Mvar)。运用本文的瞬时功率检测及补偿方法对STATCOM 进行控制,0.6 s 开始以目标功率因数Fref=0.98 进行补偿,0.12 s 时设定Fref=1.0。
图4 为本文方法检出负载功率及功率因数曲线。0 s 时投入负载1,功率因数理论计算值为0.8;在负载1 投入基础上,0.18 s 时投入负载2,功率因数理论计算值为0.936 3。图4(a)仿真分析的瞬时功率因数、功率均与理论计算值一致。图4(b)中负载0 s 投入后即可实时计算出负载功率因数,进一步说明本方法可快速地实时检测功率因数。
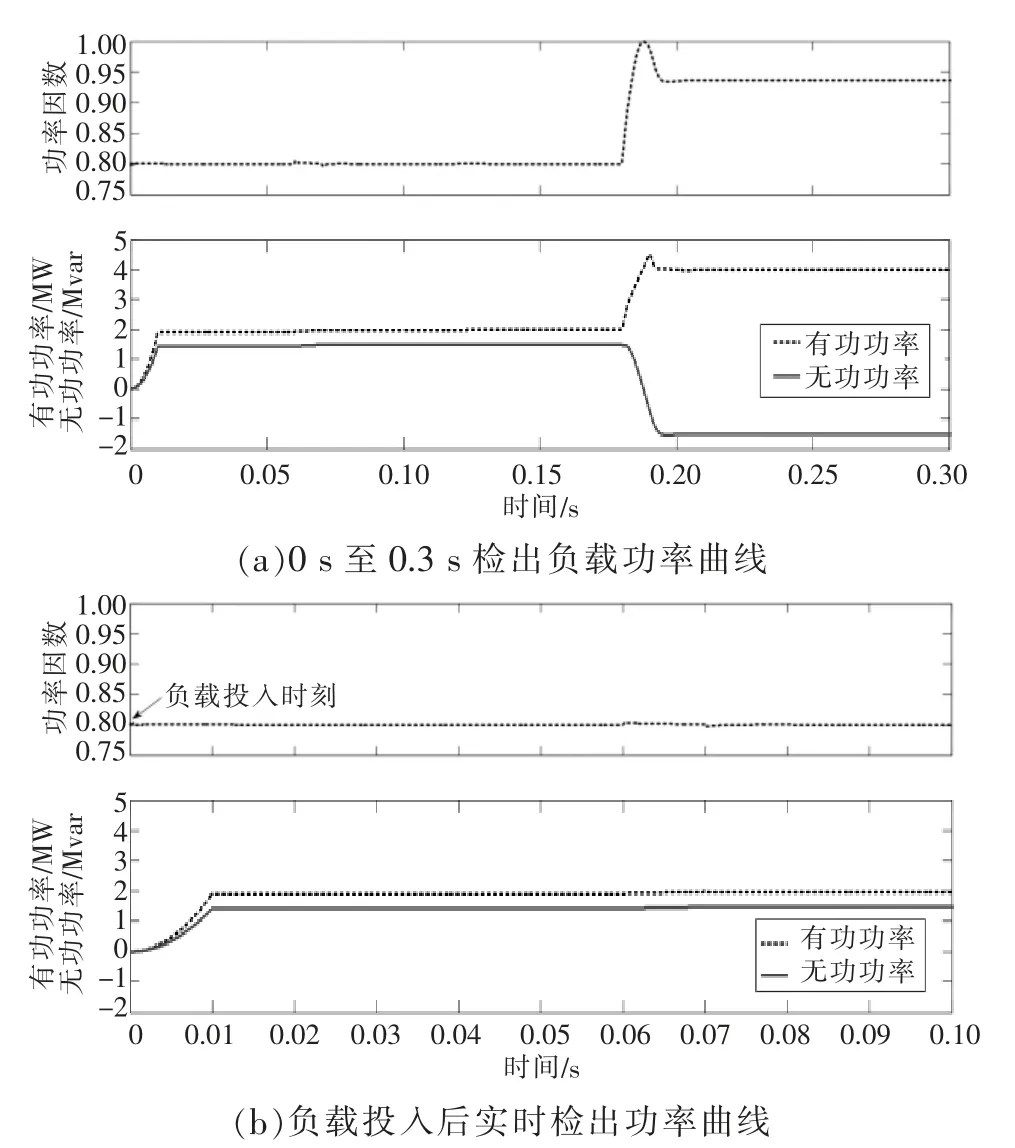
图4 本文方法检出负载功率曲线
图5 为动态补偿器补偿前后功率曲线,图6为系统电压、电流与动态补偿器输出电流波形。可以看出,利用本文方法的动态补偿器补偿后能很好地稳定系统功率因数,并且在改变负载或目标功率因数改变时均能实现快速跟踪补偿。
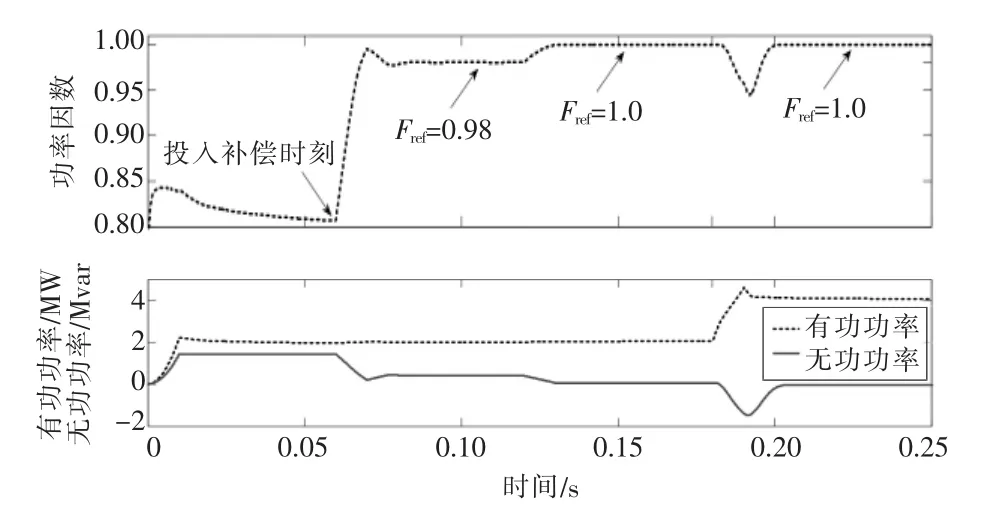
图5 补偿前后系统功率曲线
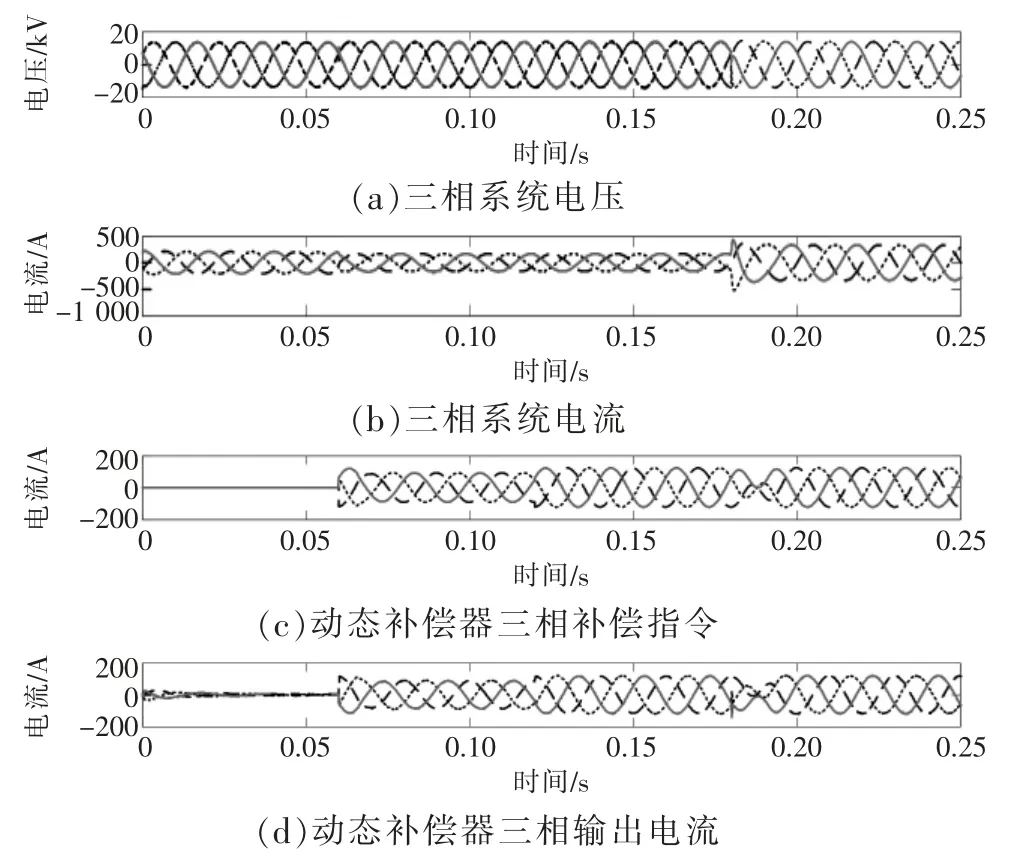
图6 补偿前后系统电压、电流及动态补偿器电流波形
为了进一步验证本文方法在电流畸变场合的有效性,在以上仿真模型基础上,0 s 时投入三相整流负载,整流直流侧接入61.44 Ω 电阻负载。0.6 s 开始动态补偿器采用本文方法与谐波补偿方法相结合的方式对系统进行恒定功率因数补偿和谐波治理。
图7 为电流畸变时本文方法检出负载功率及瞬时功率因数曲线。各阶段检出负载瞬时功率因数与理论计算值保持一致,进一步说明本文方法在畸变场合仍然能准确检测瞬时功率因数。
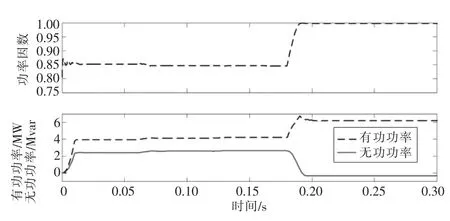
图7 电流畸变时,本文方法检出负载功率曲线
图8 为电流畸变时动态补偿器补偿前后功率曲线,图9 为系统电压、电流与动态补偿器输出电流波形。可以看出,本文方法可实现功率因数的恒定控制。
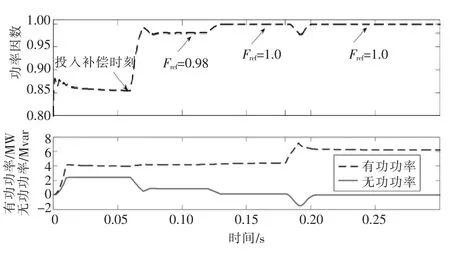
图8 电流畸变率时,补偿前后系统功率曲线
由图4 至图9 可知:本文方法可快速地实时检测出功率因数;利用本文的瞬时功率因数检测与补偿方法,动态补偿器可较好地稳定系统功率因数;对于电流畸变场合,本文方法仍可快速准确检测瞬时功率因数,并可结合其他补偿方法(如谐波补偿方法),实现电能质量的综合治理。仿真结果与理论计算值保持一致,验证了本文方法的有效性。
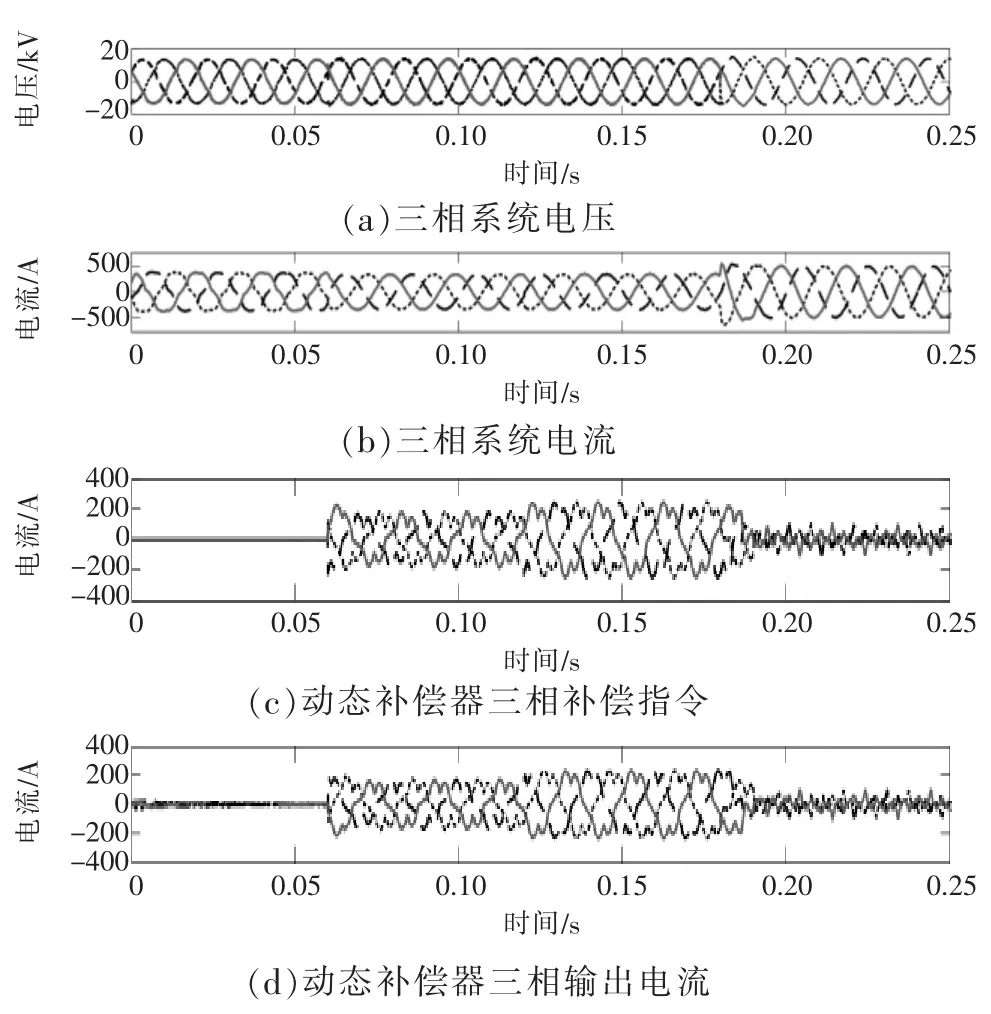
图9 电流畸变时,补偿前后电压、电流波形
4 工程应用分析
将上述检测方法应用在10 kV,3 Mvar 链式STATCOM 中,如图10 所示,应用场合为某精密机械加工企业。现场无功功率1.1~1.3 Mvar,系统电流总谐波畸变率6%~7.6%,系统电压总谐波畸变率1.35%~1.65%,基波频率波动范围49.9~50.1 Hz,系统电流不平衡度3%,设备投入后进行恒定功率因数补偿。

图10 现场参数及应用
图11 为设备投运前三相电流波形及谐波分析,电流畸变率达到6.5%。
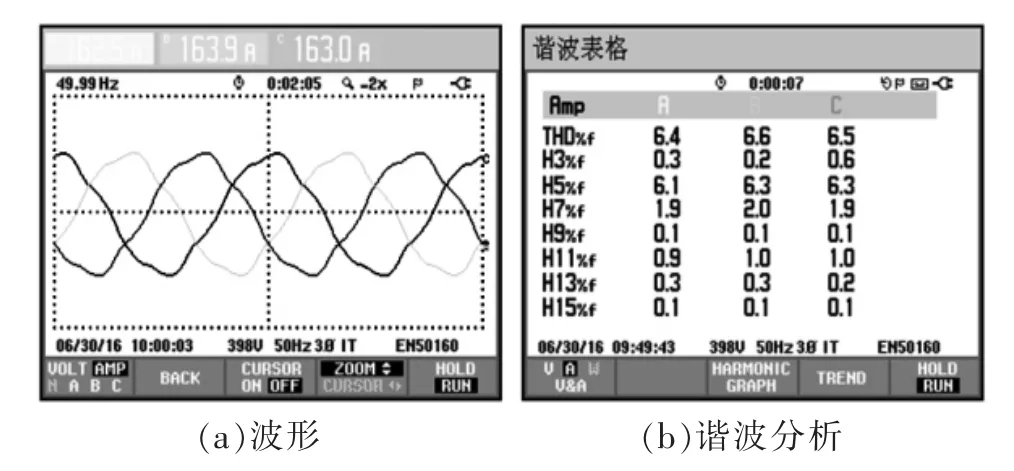
图11 设备投运前三相电流波形及谐波分析
图12 为设备投运前系统功率分析,最小功率因数为0.88,最大功率因数为0.92。
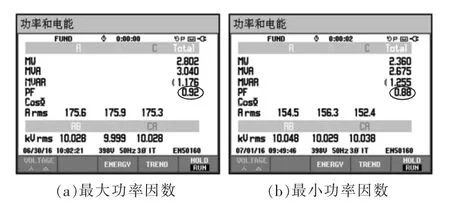
图12 设备投运前系统功率分析
图13 为链式STATCOM 运用本文方法补偿后,对系统功率因数进行恒定功率因数补偿,目标功率因数Fref分别设为1.0 和0.98。尽管电流存在畸变,补偿后系统功率因数与目标功率因数一致。实际工程应用结果进一步验证了本文方法的正确性和有效性。
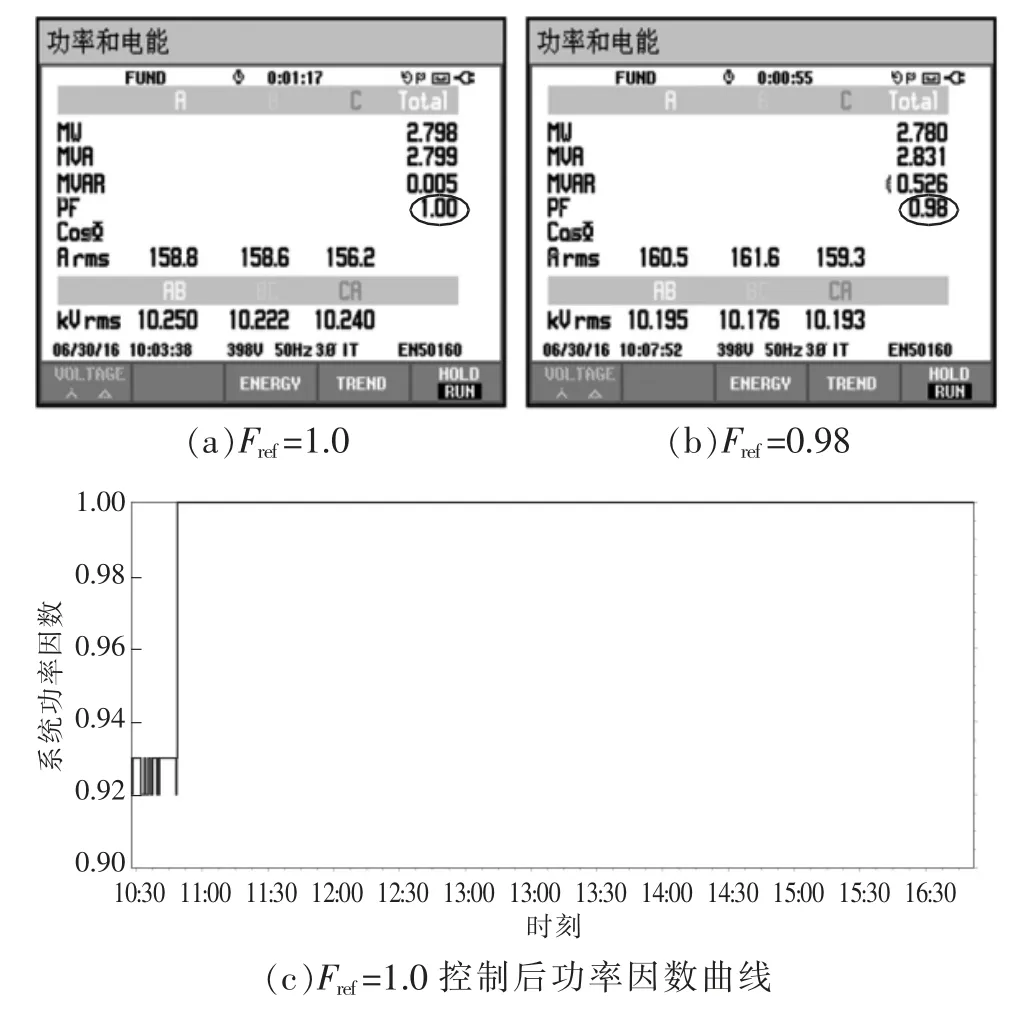
图13 采用本文方法进行恒定功率因数补偿后的功率分析
5 结语
对于矿热炉、黄金冶炼、电解铝等行业,功率因数的变化将直接影响其制造精度及产品合格率,因此稳定电力系统的功率因数极其重要。本文分析了传统功率因数补偿方法的原理,结合常见补偿方法存在的问题,提出一种基于虚拟旋转坐标系的瞬时功率因数检测及补偿方法。该方法采用虚拟旋转坐标系和瞬时功率因数检测方法对功率因数进行实时检测,避免了原有方法电压畸变以及电压锁相精度低造成检测精度降低的问题。并且,以恒定的功率因数作为控制目标,实现了恒定的功率因数闭环控制。理论计算、仿真分析和工程应用结果均验证了该检测方法的正确性和可行性。本文方法对于电压和电流畸变的场合,仍然可实现瞬时功率因数的准确检测和补偿控制。本文方法结合其他补偿算法,也可实现电能质量的综合治理。