机械制造环境下无人机热红外图像空间分辨率降尺度处理
2021-09-27杨晶晶
杨晶晶,欧 冰,李 海
(中山职业技术学院,中山 528400)
0 引言
无人机突破了飞行跑道的限制,可以在多种环境中完成空中作业,因此常被广泛应用于机械制造业领域[1],然而由于热红外成像技术的限制,高空间分辨率和高时间分辨率难以直接获得。而通过对大尺度图像信息输出分析转化能够获得小尺度图像信息,有效获取图像细节,从而为机械制造过程提供更有效的图像处理效果。
文献[2]提出热红外图像降尺度研究,将上海市设定成研究对象,以地表植被为主要研究目标,归一化处理数值,并将植被分解成三层结构,将其输入至热红外中,实现了降尺度研究。文献[3]提出以地表温度反演为目的的降尺度方法,根据光谱特征校正多光谱影像,再通过分解混合像元获得不同端元的丰度,继而构建端处理模型,实现地表温度的估算。以上两种传统方法在一定程度上解决了热红外图像空间分辨率不足的问题,但在实际应用中仍存在降尺度精度不高的问题。
针对上述问题,本研究提出面向机械制造环境的无人机热红外图像空间分辨率降尺度自动化处理方法。首先进行图像的预处理,再将图像输送至BP神经网络,进行降尺度训练,从而提高降尺度的精度和质量。
1 无人机热红外图像降尺度
利用无人机搭载热红外遥感技术进行地表温度监测是最常用的手段,但是获取到的红外图像一般是大尺度图像,包含的信息较为粗略。对于无人机热红外图像降尺度问题来说,其研究难点在于地表温度与光谱指数函数关系的不确定性。两种方法对于这一问题的处理效果不佳,需要另外进行自动化处理,因此方法过程较为复杂。在此背景下,为解决上述问题,将BP神经网络应用其中。因其具有较强的学习能力,因此无需明确数据。这一优势使得BP神经网络,适用于无人机热红外图像降尺度问题的研究。本研究分为三部分,即热红外图像预处理、地表特征参数反演及相关性分析以及无人机热红外图像降尺度实现。
1.1 无人机热红外图像预处理
图像在获取时易受到多种因素的影响,而与实际情况存在偏差,易发生失真、畸变等问题,干扰获取图像中的信息[4]。在此背景下,为还原实际图像,需对无人机热红外图像进行如下预处理工作。
1)辐射校正
辐射校正可以削弱外界环境对图像的影响,矫正变形图像,从而减少误差。基本原理是将热红外遥感图像的亮度值(DN)转变为辐射亮度值[5]。转换公式如下:

式中,Zλ为大气顶层的辐射亮度值(W/cm2.μm.sr);DN为热红外遥感图像原始DN值;Gain和offset为波段定标系数。
辐射校正中包含大气矫正,进行大气矫正可以有效减少空气散射对图像的影响,降低误差。具体计算公式如下:

式中:xa、xb、xc为大气校正参数;ρ为校正后的反射率;Zλ为波段λ的辐亮度。设定大气校正参数并记录结果,具体数值如表1所示。
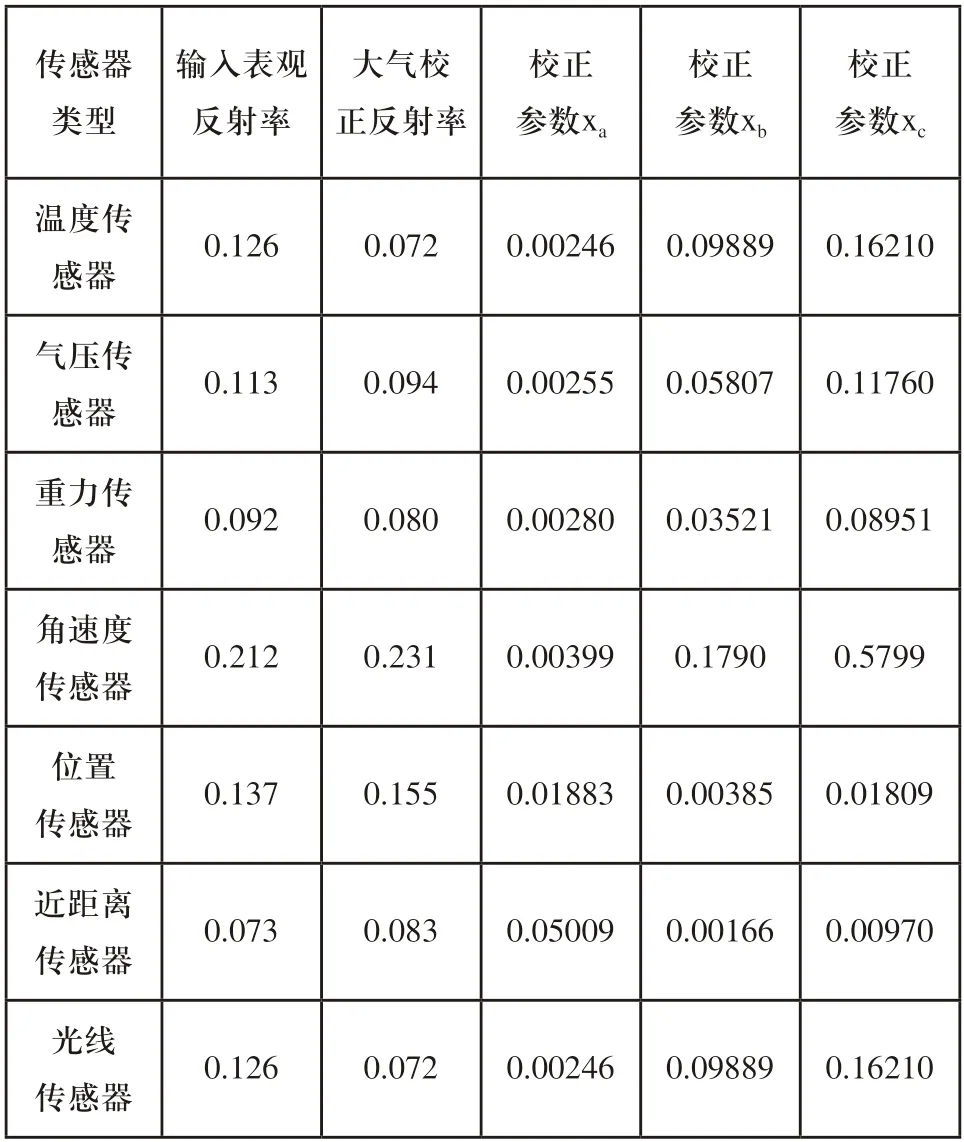
表1 大气校正参数及结果
2)几何校正
几何校正的目的是消除或改正热红外图像预几何畸变的问题,其基本思路是,通过对图像进行旋转等过程的调整,使畸变的图像恢复正常。具体过程如下:
步骤1:建立调整图像和标准图像的坐标轴。
步骤2:选择地面控制点,寻找相同位置的地面控制点。
步骤3:选择校正模型。模型公式如下:

或
x、y为像元坐标;a、b是x、y的共轭点。
步骤4:根据目的选择合适的采样方法。
步骤5:几何校正的精度分析。
3)几何配准
几何配准基本流程如下:
步骤1:图像特征提取;
步骤2:特征匹配;
步骤3:变换模型估计;
步骤4:坐标变换与插值。
1.2 基于BP神经网络的光谱指数选择与温度反演
经过预处理后,畸变的无人机热红外图像恢复正常,继而对其进行BP神经网络训练,获取高分辨率的热红外图像。其中,BP神经网络全称为人工神经网络,包含三层结构。BP神经网络可以进行正传播和反传播。进行正传播时,输入光谱指数,在隐含层处进行计算,到达温度输出层,输出再次运算,得出输出温度结果。基于此,判断输出结果与期望结果之间的差值是否小于设定的额定。若其小于额定值,则完成训练,若其大于额定值,则进入下一阶段工作,直到输出结果与期望值相近。
1.2.1 光谱指数选择
光谱指数,也可称为地表特征参数,是指影响地表温度变换的因素,例如亮度温度、大气透过率、改进的归一化差异水体指数等。选择其中几个进行分析。
1)亮度温度C
式中,K1、K2为普朗克校正常数,L表示辐亮度。
2)地表比辐射率r

其中,λ表示波长,C表示温度,BsλC表示物体辐射强度;BbλC表示黑体辐射强度。
3)大气透过率e

表2 大气透过率计算方程
4)等效大气平均温度C'

表3 等效大气温度表
1.2.2 地表温度反演
其是在已知上述光谱指数的基础上,利用单窗算法反向推导出地表温度。

Ts为地表温度;C'为等效大气平均温度;a和b回归系数(a=-67.355351。b=0.458606);α和β为中间系数。
其中,e表示大气透过率。
热红外图像降尺度中,基本流程如图1所示。
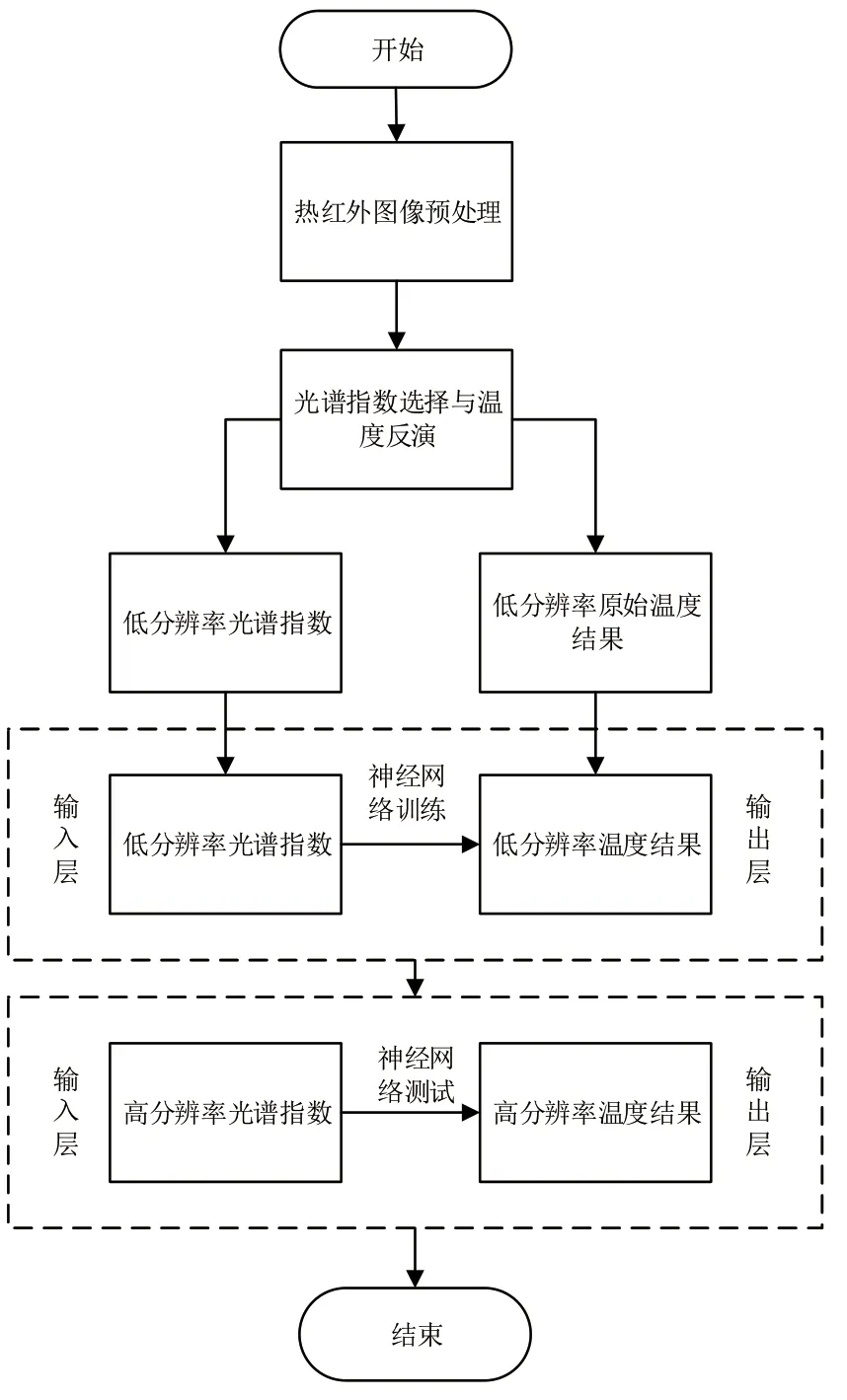
图1 BP神经网络降尺度流程
传统图像降尺度方法需对图像地表分类后,进行降尺度操作,但研究选用的BP神经网络具有优越性,获得的光谱指数和温度关系数值更加稳定,可以在复杂地形中进行运算。将上述得到的光谱指数作为BP神经网络训练输入,以地表温度反演结果作为BP神经网络训练输出,进行BP神经网络训练。训练完成后,使反演过程具有自动化属性,在进入测试节点后,以高分辨率的光谱指数作为输入,自动化输出得到高分辨率的热红外图像。
2 实验设计与结果分析
2.1 实验区基本参数及图像采集
为验证本文方法的有效性,选择广州省广东市的花都区作为实验区域,该区地表资源丰富、结构复杂,绿植以及建筑均较多,具备基本实验条件。

图2 实验区域高空卫星图
在该地区上空利用MERSI 1设备搭载无人机采集热红外图像。MERSI 1基本参数如表4所示。

表4 MERSI 1基本参数
采集到的热红外图像如图3所示。

图3 实验区热红外图像
2.2 不同降尺度方法精度对比
为验证所提热红外图像降尺度方法的精度,对比不同方法所得的输出温度与地表真实温度的接近程度。对照方法为文献[2]提出的基于改进三层分解模型的热红外影像空间降尺度方法和文献[3]提出的基于地表温度反演的热红外影像空间降尺度方法。随机选取植被区、建筑区和水体区,并且分别在三个区域中随机设定500个点作为采样点,并将尺度上升到150m,得到不同方法的温度值对比结果,如图4所示。
根据图4实验结果可知,所提方法获得的温度与地表真实温度更为相近,验证了所提无人机热红外图像降尺度方法的实际应用效果优于传统方法。
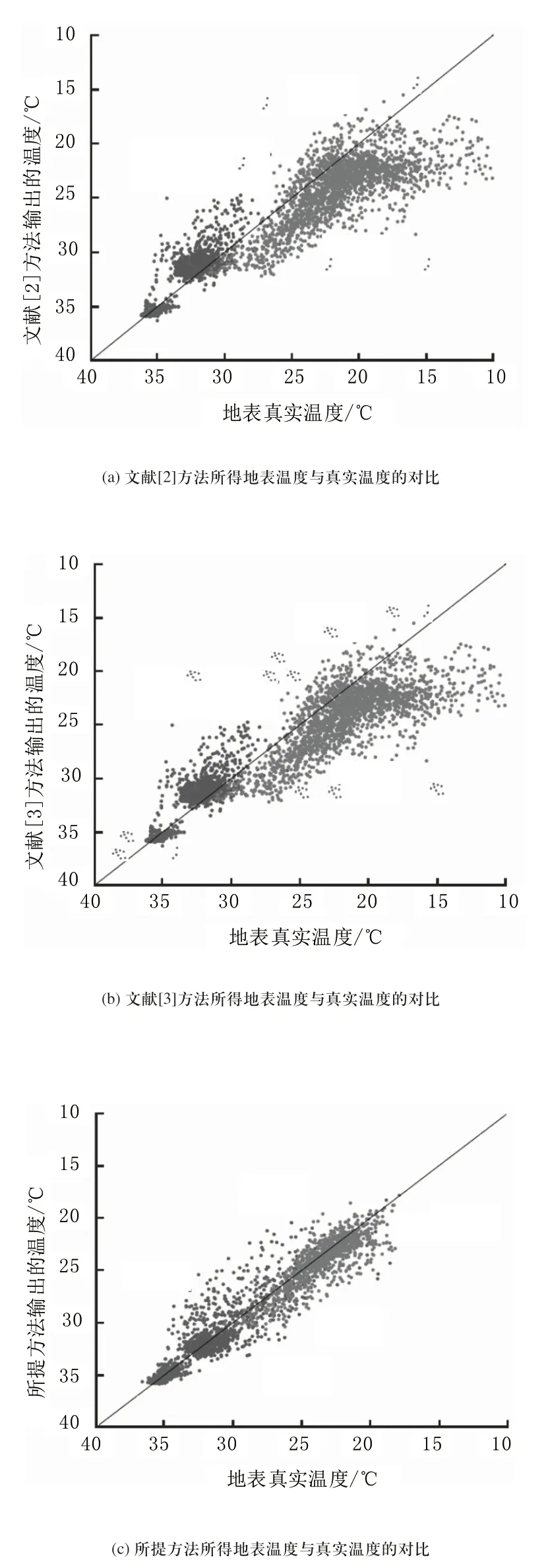
图4 不同方法的降尺度精度对比
2.3 综合指标评估
本次研究中不同方法的降尺度精度评价指标设定为均方根误差(Ra)、决定系数(R2)以及信息熵(G(i))。其中,均方根误差与降尺度误差存在正比例关系,决定系数与降尺度精度存在正比例关系。信息熵可以评估影像自身质量,信息熵值越高,降尺度后的图像质量就越高。
均方根误差:
决定系数:

信息熵:

其中,n为影像的像素数量;i为像素序号;Pi代表像素值;S为降尺度影像;SR为降尺度影像原始温度反演结果。均方根误差越小,决定系数越大;熵的值越高,因此证明图像质量好。
利用以上指标评估不同方法的无人机热红外图像降尺度结果,统计数据如表5所示。
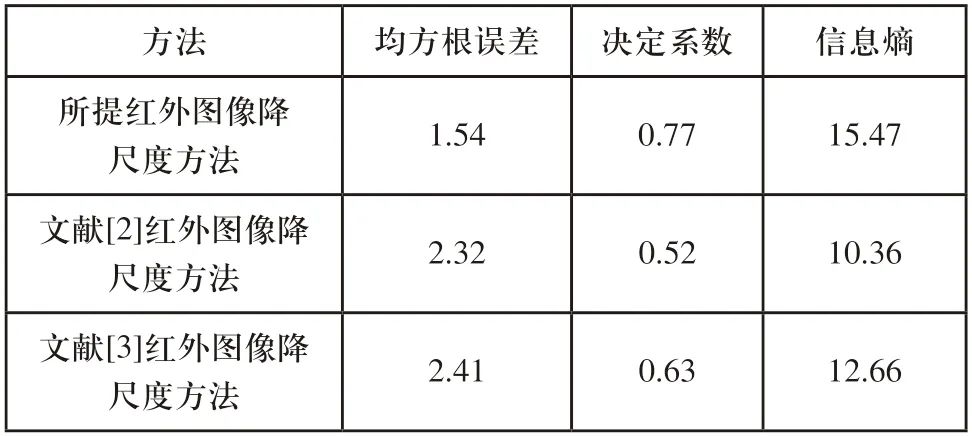
表5 无人机热红外图像降尺度质量
由表5得知,利用本文基于BP神经网络的方法对无人机热红外图像进行降尺度后,统计出来的均方根误差、决定系数和信息熵数值表现均优于两种传统方法,证明本文方法具有有效性。
2.4 不同方法降尺度后图像质量对比
为更直观对比不同方法的图像效果,利用两种传统方法和所提方法分别对原始热红外图像进行降尺度自动化处理,所得图像如图5所示。


图5 实验区热红外图像降尺度结果
图5实验结果显示:利用文献[2]以及文献[3]方法进行热红外图像降尺度后图像出现了明显失真,图像信息丢失,且图像模糊,影响方法的进一步应用。所提方法自动化处理后的热红外图像细节清晰,图像质量得以保障。本次实验验证了所提方法具有理想的实际应用性能。
3 结语
优化民用机械制造业领域的无人机机制,是提升无人机技术应用性的重要路径,为此,本文提出无人机热红外图像空间分辨率降尺度自动化处理方法。经测试可知,本文方法具有应用有效性。在日后研究中还需对该方法的其他应用性能进行测试,以期为该领域相关研究提供可靠依据。
