一种新型中小型AGV控制系统电路设计
2021-09-26珠海科技学院谢梓烊林嘉俊周永宁周子鸿
珠海科技学院 谢梓烊 张 昊 林嘉俊 周永宁 周子鸿
随着电子工业设计的发展,AGV小车控制系统电路进行设计,并探讨现有AGV电路设计的问题及优势,提出了一种基于新型中小型AGV控制系统的电路设计。该电路采用了主要的四个部分及电源部分、H桥驱动部分、H桥部分、电流反馈部分,实现对轮胎电机进行转向和刹车,所设计的电路基本满足AGV轮胎运动控制功能,可作为AGV设计参考。
1 介绍和背景
随着智能物流行业中的中小型自动导引运输车(AGV,Automated Guided Vehicle)的发展,直流电机控制系统因为其较好的启动及调速性能得到了广泛地应用,但存在着启动响应速度较慢、精度较差等缺点。由于AGV的车载动力源多为24V和48V的铅酸电池和镉镍电池,并且在AGV电机驱动扭矩和功率的限制下要求电机驱动器输出的电流较大。因此,前人针对直流有刷电机在电源电压较低输出电流较大的场景设计驱动器时,主要从电机调速平稳性、驱动器输出电流和电压等方面改进。陈曦和隋龙(2009)基于大功率脉宽调制(PWM)设计了H型全桥驱动电路并引入了死区逻辑可以有效减少PWM输入路数;纪玉亮等(2015)提出了双边延单稳态触发器启动延时可调电路,其本质是在电路外围接入限位开关与开关延时的截流反馈电路;但在升压为IC供电过程中一直存在升压损耗问题使电机驱动效率较低,由于电机驱动电路大多数采用的是H桥驱动电路,导致对于电压要求较高,也就是要采用线性调节器进行增压,因此,许多公司针对这种情况设计了开关电源(Switch Mode Power Supply,SMPS),如急速微电子(Allegro MicroSystems,Allegro)推出了电机驱动芯片A3908EEETR-T,其峰值输出电流高达500mA,峰值输出电压高达4.8V。尽管该芯片功能灵活,但其输出电流和输出电压较低,并且输出接口数较少,不能控制多个电机,因此不能满足小型直流电机驱动系统中。
针对上述问题,本文选用了意法半导体(ST)公司的MC34063芯片,该芯片输入电压谷值低至2.5V,具有短路电流限制功能,低静态工作电流。本文提出了一种AGV控制系统电路设计,对现有驱动电路进行优化设计,利用直流电机驱动电路,提供稳定、高效的的动力输出,以便适应各种复杂状况。
2 AGV小车供电电路设计
由于平台式分拣系统对于AGV小车尺寸有一定限制,所以大部分的AGV小车因此不得不选择相对体积小、电压低的电源,如5V直流电源。如果电源提供的电压与电机要求的电压不匹配,就应该引入升压或降压电路。本文中AGV小车的电机驱动需要5V电压,电源电压大于5V,因此需要降压处理。如图1,一开始电源输入,经过大电容。目的是因为输入的是交流电,经过带有极性的大电解电容后,对不平滑的直流电进行滤波,且对交流电不起作用,然后采用深圳市华之美半导体有限公司(H&M Semiconductor)的HM78M05芯片进行降压并为后面的IC供电和电机编码器供电起到关键作用。
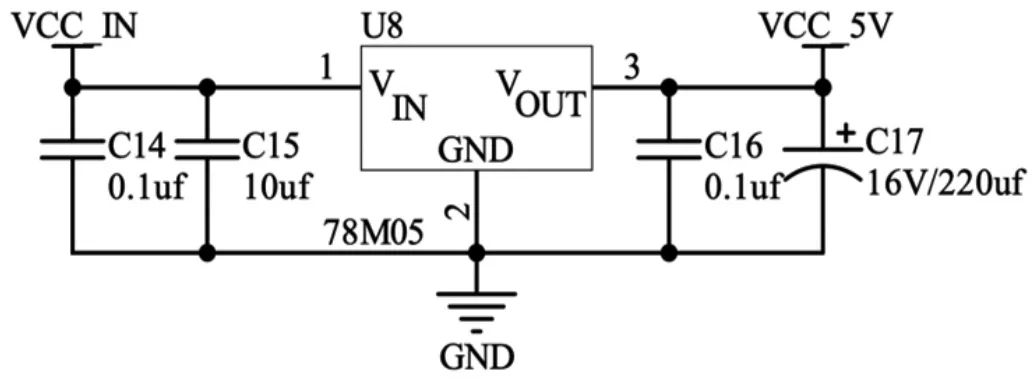
图1 HM78M05降压模块电路
3 AGV小车车轮电机电路驱动设计
3.1 升压电路
由图2所示,该电路的14V电源使用5V升压获得,升压部分采用意法半导体(ST)的MC34063单片机BOOST DC-DC解决方案,而MC34063是一单片双极型线性集成电路,专用于控制直流-直流变换器部分。它由具有温度自动补偿功能的基准电压发生器、比较器、占空比可控的振荡器,R—S触发器和大电流输出开关电路等组成,而大电流输出开关,能输出1.5A的开关电流。它能使用最少的外接元件构成开关式升压变换器、降压式变换器和电源反向器。
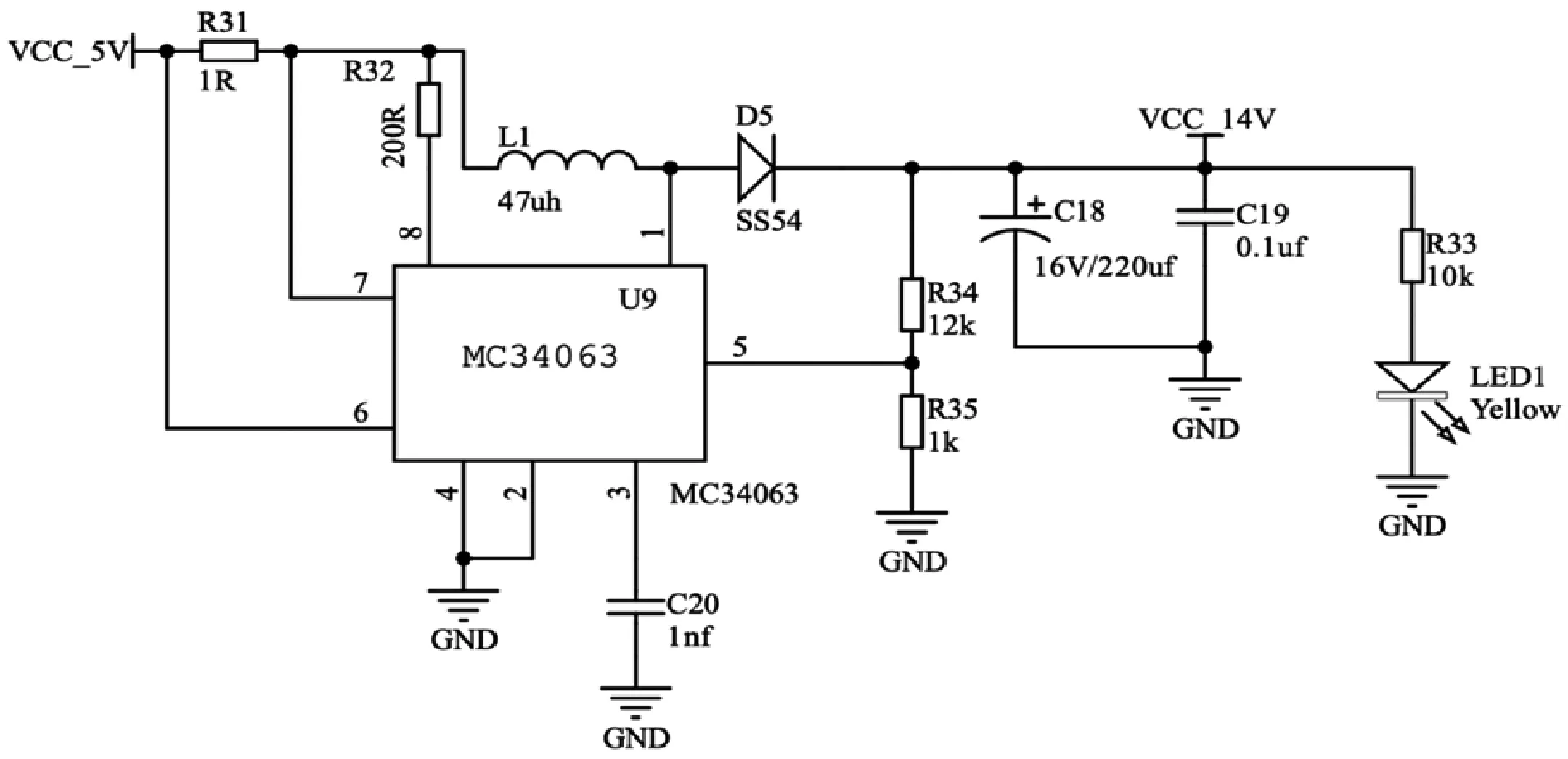
图2 MC34063升压模块电路

图5 RC导通延时产生死区时间的波形
R31为输入电流采样电阻,当R31上的电压超过300mv时,将会触发MC34063的过流保护功能,输出将会终止。R32为内部集电极供电电阻,L1为储能电感,D5为续流二极管,R34和R35组成分压器,负责将输出电压缩小到1/13反馈至电压采样端(5),C18为输出储能电容,C19为高频滤波电容。R33和LED1组成LED指示灯电路,R33为LED的限流电阻。通过MC34063设计升压电路,令输出端为14V后面的IC供电。
3.2 H桥驱动电路
H桥驱动电路由两部分组成,分别为图3电压转换部分和图4H桥悬浮驱动部分组成,由于单片机只能输出3.3V-5V,无法直接驱动悬浮驱动芯片,故使用美国国家半导体公司(National Semiconductor,NS)的LM393芯片搭建电压比较器,来完成电压转换的任务(3.3V至14V)。通过比较电压的高低来控制轮胎电机的转向。

图3 LM393电压转换电路

图4 H桥悬浮驱动电路
R21、R25,C9组成电压基准电路,负责输出一个约1.65V(3.3V/2)的电压,用来和单片机输出的3.3V作比较。R20、R29为保护电阻,防止单片机意外断开导致比较器输出高电压,烧坏全桥。由于LM393为开漏输出,故使用R17和R26将输出电压拉升至14V,也就是说,当INPUT输入电压低于1.65V,电路IN1输出为0V,当输入电压高于1.65V,电路输出14V。
由于H桥的上部分NMOS的源级不接地,故需要悬浮驱动来驱动H桥的G极。EN_1端的电阻R3为下拉电阻,防止与单片机意外断开连接时端口被意外拉高导致H桥意外导通。
对于两个电机的AGV小车,在进行直线行驶时,应保持两个电机的PWM协调工作。但是由于许多拥有两个电机却没有差速器的AGV小车,转弯的力矩将会导致AGV小车难以转弯。通过两个电机差速控制的方法,能使AGV小车转向更加平稳,大有效的降低了转弯半径,甚至可以实现原地转向的功能。
悬浮驱动电路原理:
当IN1_1输入低电平时,LVG输出高电平,由于Q4导通,导致6脚被拉低,这时自举电容C2将通过自举二极管D1被充电至12.3v左右。当IN1_1输入高电平时,Q4截至,Q2导通,导致6脚电压被抬升至VCC_IN,此时由于二极管的单向导电性,D1截至,电容上端8脚电压为VCC_IN+12.7V,这时8脚电压通过7脚输出至H桥上管的G极,驱动上管继续开启。
3.3 H桥部分电路
R1、R2、R4、R5为G极驱动电阻,用以提高驱动阻抗,降低G极振铃。Q1-Q4为四个NMOS,C1为输出高滤波电容,J1为连接器,用以连接电机。通过搭配NMOS管,最大电流能达80A。漏源电压(Vdss)30V,连续漏极电流(Id)(25°C 时)86A。

图6 H桥部分电路
3.4 电流采集部分电路
所有流过H桥的电流均会流过R6并在R6上产生压降,但是由于该电阻只有0.5ohm,导致该压降很小,难以用ADC进行测量,故对该电压进行放大,原理是利用一个NS公司的LM258搭建一个同相比例放大器,用于控制AGV小车的刹车制动,其中C8和C7为高频滤波电容,R11为输入缓冲电阻。R7和R12为反馈网络,用以提供31倍的电压放大效果。R10为输出缓冲电阻。

图7 H桥部分电路输出电压

图8 电流采集部分电路

图9 经过放大的负载电流波形
通过本文对驱动电路的设计,详细展示了电路的各个部分的功能,使用LM258芯片,即双运算放大器。用于控制轮胎电机刹车制动。使用LM393芯片,即电压双比较器通过比较电压的高低来控制电机的转向。且自主设计的H桥驱动电路有较高的灵活度,优化了布线方式,提高了更换元器件的效率。将设计的电路驱动安装在AGV小车上可应用物流、无人工厂等领域。
