一种跟随式助老机器人的设计与研究
2021-09-26湖南工程学院机械工程学院李晓天
湖南工程学院机械工程学院 李晓天
随着电子信息、人工智能等技术的迅速发展,人们对助老类服务机器人方面的构想更多倾向于其具备适应复杂环境,能自主移动,具有环境感知和动态决策等能力。针对这一问题,文章从传感系统、机械系统、控制系统、驱动系统等四个方面设计开发了一种全地形跟随式多功能助老服务机器人。其能实现全地形跟随、多功能助老服务这两大功能,从而满足老年人对于一种全新、便捷、低碳、高效率、人性化、智能化的生活、出行方式的迫切需求。
根据全国老龄工作委员会办公室公布的数据,截至2017年底,我国60岁及以上老年人口2.41亿人,占总人口的17.3%,其中2017年新增老年人口首次超过1000万。随着全球老龄化的日益加剧,老年人逐渐增多,他们的身体机能有所退化,但是绝大部分生活还是可以自理的,如果在他们出行、买菜、锻炼、娱乐或者居家等生活过程中有一个能跟着老人在复杂多变非结构化的环境中去行驶并为他们提供运载、存取物品、监控、娱乐等行走辅助、日常监护和陪伴娱乐相关服务的产品,能大幅提高他们的生活质量。
1 超声波自主跟随原理
超声波自主跟随原理如图1所示。在机器人的两端各安装一个单发单收超声波,使用者手持一个超声波模块。这样左侧与右侧和使用者三者之间就构成了一个三角形。当机器人正对着使用者时,装在机器人上的两个超声波模块,距离A=B。当使用者左拐时,A必定小于B,同理当使用者右拐时,A大于B;当人向前走时,A和B的距离必定大于设定距离,控制好距离即可实现自主跟随功能。超声波发射电路、超声波接收电路如图2、图3所示。
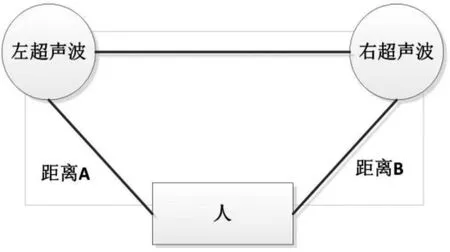
图1 超声波自主跟随原理示意图
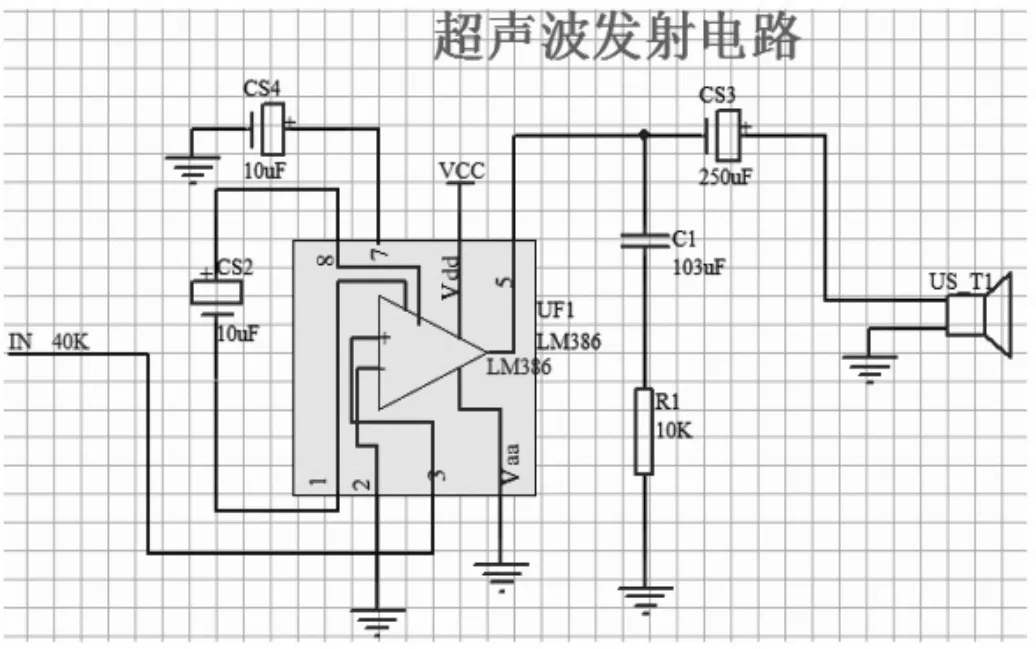
图2 超声波发射电路

图3 超声波接收电路
2 机器人系统设计
2.1 传感系统
2.1.1 传感系统概述
传感系统的灵巧是精细化工作的重要保障。全地形跟随式多功能助老服务机器人采用智能AI联网+多传感器信息采集融合分析控制技术,以图像识别为主,超声波模块、声源定位为辅,陀螺仪平衡,自适应避障,真正实现全地形运载、存放物品、监控、娱乐、天气等多功能助老服务和自主运行自适应跟随功能,切实符合老年人使用。
全地形跟随式多功能助老服务机器人需要显示屏模块、图像识别模块,超声波测距模块,声源定位模块,联网模块,红外传感器,压力/力矩传感器,CCD摄像头,陀螺仪等器件来保证其精准地完成全地形自适应跟随及其相关助老服务。
2.1.2 传感系统架构
显示屏模块、摄像头模块、驱动模块、超声波测距模块分别安置在开发板上,开发板安装在机器人上,显示屏模块和摄像头模块安装在机器人顶部,用于识别目标物体,超声波测距模块安装在摄像头模块和显示屏的正下方。超声波模块、图像识别、声源定位三大模块,通过对周边环境的感知,以便控制系统对电机进行恰当操作。
超声波模块由于智能化程度较低,所以采用图像识别模块配合使用。因此只有在图像跟踪有效的情况下,才能使用超声波进行测距。超声波模块解决了前后的问题,而左右的问题用摄像头来解决。当摄像头锁定目标后,左右转动小车,使目标居中,此时获取超声波距离,通过前后移动把距离调节到合适的位置。但由于图像识别范围有限,即使是广角摄像头也只能处理前方一定角度内的图像,在摄像头丢失图像后则使用声源定位来获取人员位置。
另外考虑到声源定位容易受到各种因素,比如电机转动的影响,因此每次探测完成后等待电机做完所有动作才进行下一步探测。尽管超声波模块发射声波时也会干扰声源定位模块,但是由于超声波模块有方向性并且强度不大,所以这个干扰忽略不计。
2.2 机械系统
全地形跟随式多功能助老服务机器人外观框架如图4所示,机体表面采用曲面光滑设计,以便减少空气阻力,增强机身磨损度。车轮结构如图5所示,采用齿形轮结构设计,内部装载空间采用减震系统(防止内部装载物品的损坏)+可调隔板(根据需要调节各个区域空间大小)设计,在针对装载要求较高的物品时,内部设有小舱(做防燃等处理)能轻松、高效、稳定地应对崎岖路面,楼道阶梯等复杂多变的非结构化地形和环境,实现爬楼梯和运载物品功能,进而还减轻了老年人出行、上下楼梯的负担。
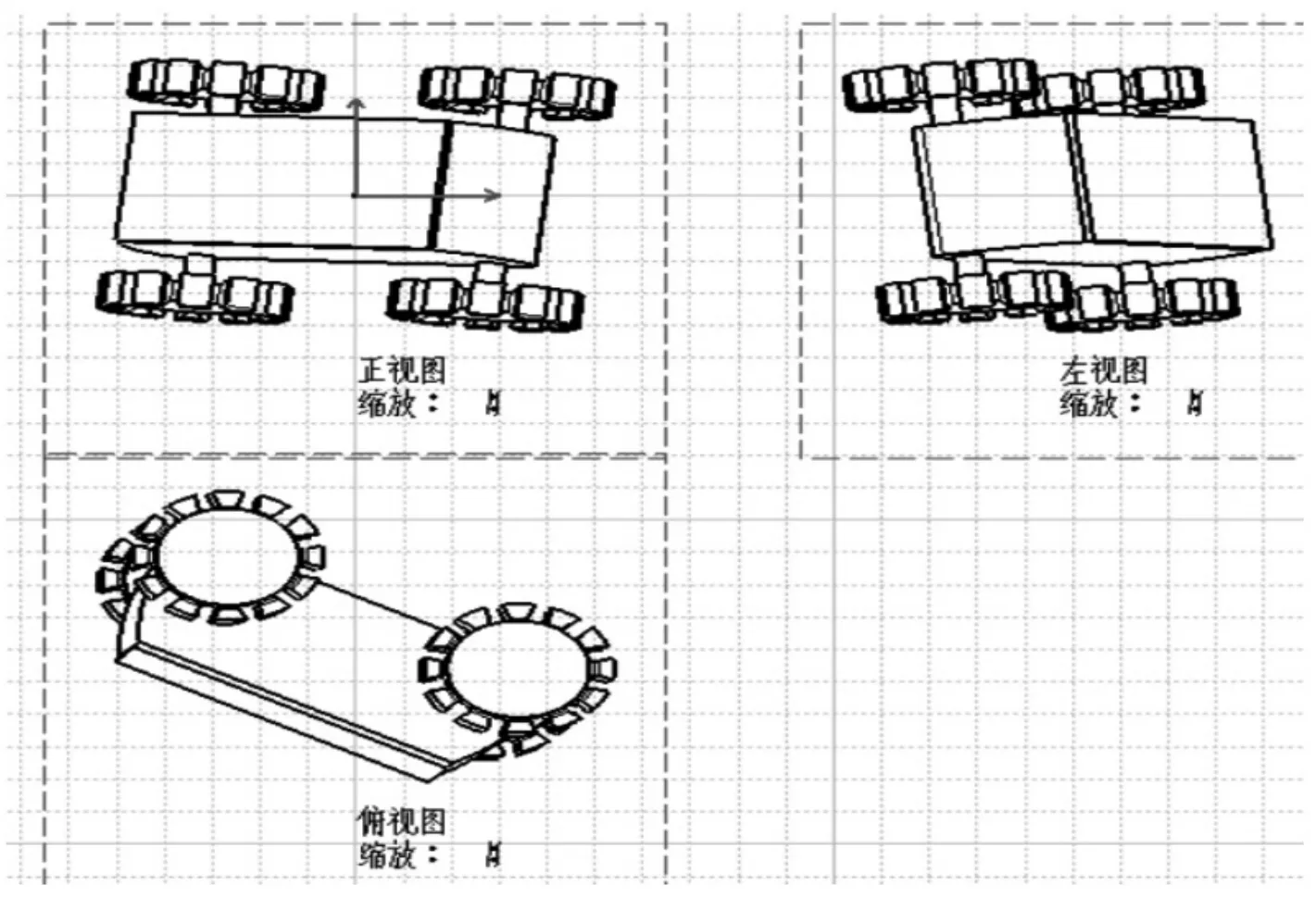
图4 外观框架示意图
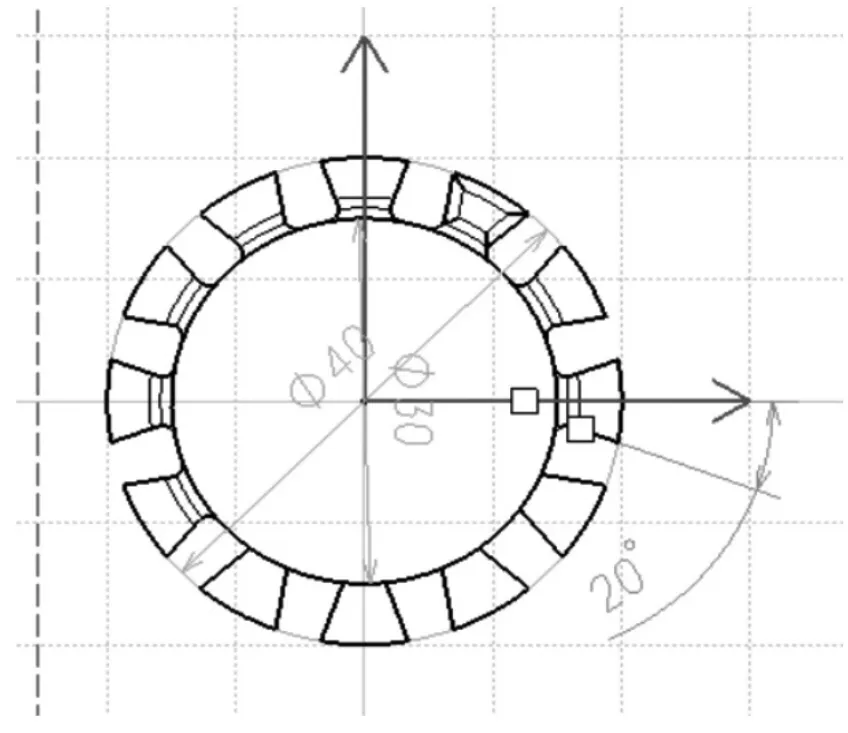
图5 齿形轮示意图
2.3 驱动系统
出于安全性,环境保护等因素的综合考虑,且由于电驱动在输出力矩、速度、质量、体积、可靠性、控制性能等指标上具有良好的综合性能,全地形跟随式多功能助老服务机器人采用电力驱动。具体采用微型电机和微型齿轮减速器作为驱动源,为其功能的实现提供动力。利用PWM(Pulse Width Modulation脉冲宽度调制)驱动方法,占空比越大,电机的速度越快,电机驱动芯片采用L298N,使用两路pwm信号分别驱动左右轮,以实现前进、后退、减速、以及转向等控制。而对于电池的要求,出于稳定性、价格、应用率、技术成熟度等方面的考虑,采用市面上应用较广的铅酸蓄电池。电机驱动模块电路如图6所示。
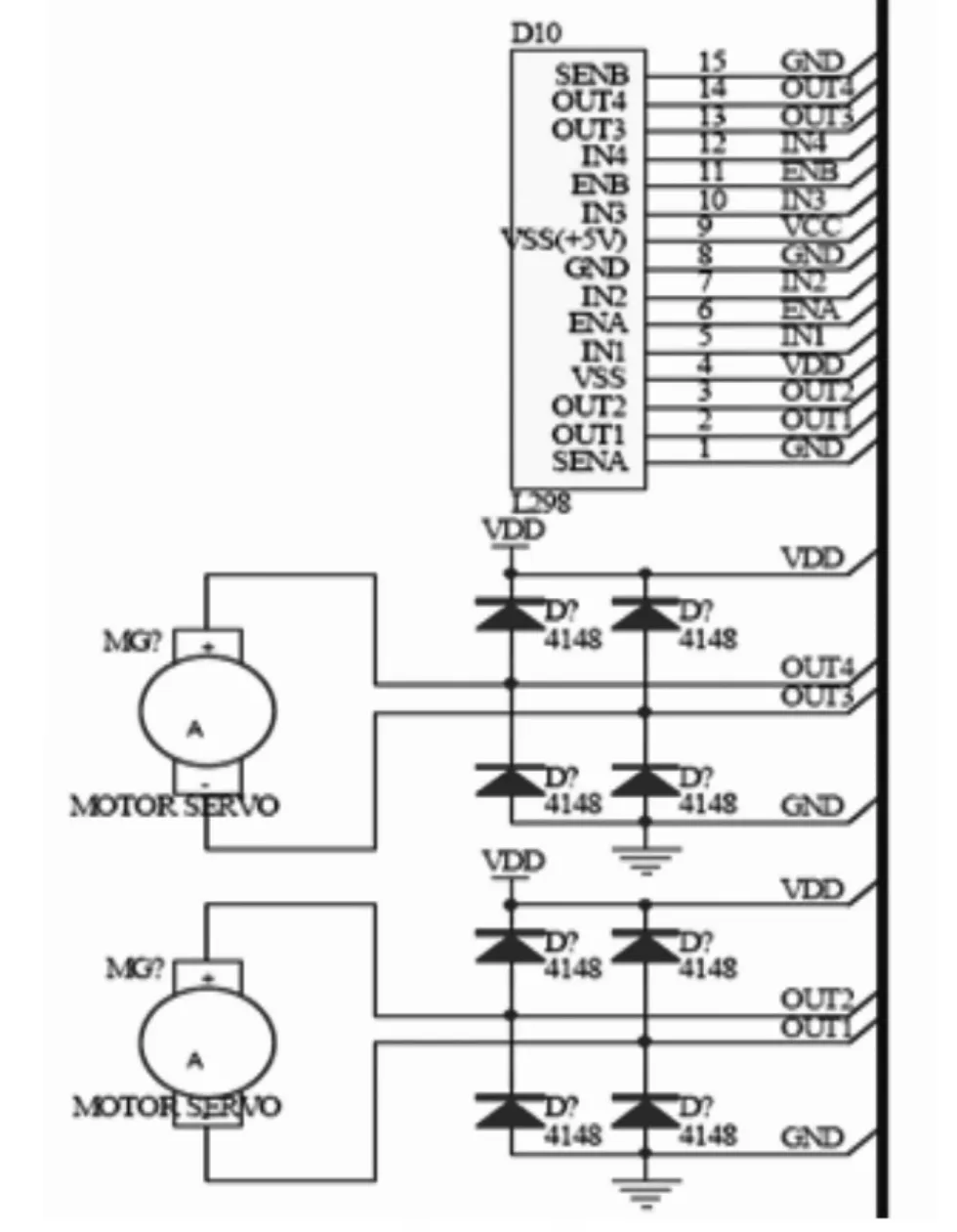
图6 电机驱动模块电路
2.4 控制系统
控制系统需要高速的数据采集与分析。全地形跟随式多功能助老服务机器人拟采用以先进控制技术为核心,以计算机控制为手段,以功能强大的硬件做依托的综合调度控制系统,其硬件框图如图7所示。
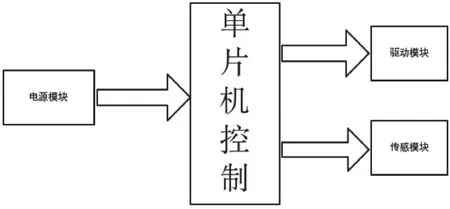
图7 硬件框图
全地形跟随式多功能助老服务机器人采用盛群HT66F50作为主控制CPU,其电路如图8所示,内部集成了4MHZ、8MHZ和12MHZ时钟,可提供PWM产生功能。盛群HT66F50是一款具有8位高性能精简指令集的flash单片机。它可以在不同的工作模式之间动态切换,从而优化了单片机操作,同时也降低了功耗,并且HT6F50提供了Pin Remapping功能,允许一个引脚可以选择不同的功能。除此之外,单片机包含一个多通道12位A/D转换器和双比较器功能。
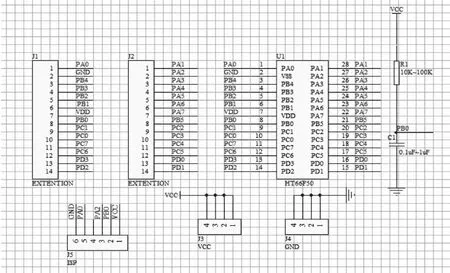
图8 主控单片机模块电路
3 程序设计
以图像识别为主,放置在主程序循环中,超声波模块、声源定位为辅,陀螺仪平衡,自适应避障。若图像识别跟踪能够检测到目标,调用超声波模块的传感器数据,就不使用声源定位。若目标丢失则启用在独立线程中实现的声源定位。传感器数据获取工作在单片机中循环实现,另外开一个线程去接收,但是只管收而不使用,只在需要时超声波距离数据时才使用这个数值。
文章设计的全地形跟随式多功能助老服务机器人能稳定实现保持1m固定相对距离的全地形跟随助老服务功能。全地形跟随式多功能助老服务机器人的设计不仅提高了机器人的智能化程度,而且在机器人应用中比较实用,是机器人领域中值得研究的一个方向。虽然目前跟随机器人的研究已经非常深入,但还未达到商用程度,特别是对于复杂地形自适应,尤其是在上下楼梯爬坡方面很有研究价值。全地形跟随式多功能助老服务机器人能够在老年人出行、买菜、锻炼、娱乐或者居家等生活过程中跟着老人在复杂多变非结构化的环境中去行驶并为他们提供运载、存取物品、监控、娱乐等行走辅助、日常监护和陪伴娱乐相关服务的产品,能大幅提高老年人生活质量,是一个很有实际意义和实用性的机器人设计。
