航天飞行器在共面多轨道间的机动规划方法研究
2021-09-26刘冰雁于鸿源马心意房莹张颂
刘冰雁 于鸿源 马心意 房莹 张颂
(1.军事科学院,北京100091)(2.解放军32032部队,北京100094)
引言
航天飞行器在太空轨道间快速开展维护、补给、移除和再利用等在轨服务,都需要在所带燃料支撑能力下依一定顺序访问各目标轨道.太空轨道是当飞行产生的离心力相当于地球地心引力而在一定高度绕地球做圆周运动的运行轨迹.当这些运行轨迹均位于同一轨道平面内时,为共面轨道.地球周围太空按高度分高、中、低轨道,范围可达几万公里,飞行器在多轨道间机动,为了节省燃料通常遵循开普勒定律,多采用双脉冲、多脉冲的机动形式.但在紧急情况下,飞行器需要以任务为重心,在最短时间内执行所有在轨服务,多轨道间的机动时间便成了任务成败的关键.因此,面对相距较远的多条轨道,需结合飞行器所带燃料选择变轨方式,规划出用时最短、科学合理的机动方案.
有关轨道机动规划,Zaborsky[1]、Pontan[2]和谢成清[3]研究了两轨道间的转移轨道设计问题,对分析不同方式下的轨道间机动效果具有借鉴意义.袁建平[4]、李俊峰[5]和孙冲[6]关于非开普勒轨道机动方面进行了探索研究,对轨道间采取非开普勒径向机动方式的提出具有启示作用.欧阳琦[7,8]、余婧[9]和朱啸宇[10]针对在轨服务进行了任务规划研究,以燃料消耗最小为出发点简化机动过程,重点研究了任务分配和资源调度问题,但较少考虑多轨道间的机动规划问题.
本文将根据航天飞行器的变轨机动需求,考虑开普勒的霍曼、高斯以及非开普勒径向三种典型变轨机动方式,构建共面多轨道间的机动规划模型,针对有限时间及燃料通过机动策略寻优算法解算,以获得最短机动时间和最优机动方案.
1 轨道间机动方式分析
太空轨道是空间任务中的基本要素,是航天飞行器仅受引力作用的稳态飞行路径.轨道间机动是靠动力装置改变飞行轨道的行为,是以初始轨道为起点通过转移轨道抵达目标轨道的过程.共面轨道间机动方式的选取需要考虑初始轨道与目标轨道的共面性、切向速度冲量与转移轨道形态的约束性及开普勒机动与非开普勒机动的相异性.
1.1 共面霍曼变轨机动
在一定离心力下,航天飞行器只受地球引力和轨道摄动影响,将沿着一定轨道飞行.若想从当前轨道跨越到同一轨道平面内的另一轨道,就需要飞行器自身动力系统提供外力改变原有飞行速度或方向.以最省燃料为出发点,遵循开普勒运动,只需给予飞行器一个速度增量改变运行轨道使其沿转移轨道飞行,当此转移轨道正好与目标轨道相切即可完成轨道间的机动,这就是共面霍曼变轨机动的基本原理.
共面霍曼变轨机动过程如图1所示,在半径为r1的初始轨道C1的任意点P产生第一个速度冲量Δv,改变其原有轨道飞至转移轨道E,E的近拱点为P、远拱点为A.经过半个转移周期达到远拱点为A,远拱点正好与半径为r2的目标轨道C2相切.一般轨道转移问题在考虑近拱点速度冲量vhm改变原来轨位的同时,还需要考虑到远拱点顺利进入目标轨道问题.但我们研究的轨道间机动任务中,到达目标轨位附近后不一定采取入轨行为,有可能根据操控任务需要采取伴飞、绕飞和悬停等动作.因此,在轨道间机动过程中论文主要考虑初始变轨过程中的速度冲量、燃料损耗和转移轨道周期问题.

图1 共面轨道间机动方式示意Fig.1 A schematic illustration for maneuver mode between coplanar orbits
设vc1和vc2分别为初始轨道C1和目标轨道C2的速度,椭圆转移轨道与初始轨道相切的近拱点P的速度为vEP,μ为天体引力常数.共面霍曼变轨机动方式中:转移轨道的远拱点正好与目标轨道相切,据此可以构建轨道速度与轨道半径的关系模型[11]:

由此可知,轨道速度主要跟地球引力常数、轨道半径相关,轨道转移速度可以根据初始轨道速度、半径以及目标轨道半径确定.再根据开普勒方程,可以证明椭圆轨道的运行周期只与长半轴a有关,而与轨道形状(偏心率)无关.基于以上分析,可推导出共面霍曼速度冲量模型、长半轴模型以及转移轨道周期模型:

1.2 共面高斯变轨机动
通过对轨道动力学和开普勒运动分析可知,速度冲量Δv在一定范围内递增,如图2所示转移轨道形态将由椭圆经长椭圆向抛物线演化,变轨机动时间t也将由半个转移周期T逐渐缩短.在开普勒定律下,只需知道初始轨道与目标轨道位置以及可提供的速度冲量,便可估算变轨机动时间和各轨道参数的方法均属于共面高斯变轨机动方式,霍曼变轨机动可视为高斯方式的一种特例.由速度冲量改变产生的各种共面高斯轨道机动方式,与共面霍曼变轨机动相比,能有效缩减轨道间机动时间,但需以增大速度冲量为代价,这对航天飞行器的动力装置和燃料储备提出了更高要求.

图2 不同速度下的转移轨道形态图Fig.2 Transition orbit morphologies at different velocities
由此,共面高斯变轨机动方式中的速度冲量Δv是一个不确定量,需根据动力装置及燃料储备提前确定 .可依据开普勒运动[11,12]建立以速度冲量为变量的转移轨道近拱点与初始轨道的速度关系模型:

接着,根据活力公式可计算求得转移轨道的各轨道根数[11].其中,依据开普勒定律和运动方程M=E-e⋅sinE,可构建出飞行器从初始轨道变轨机动至目标轨道的机动时间模型:

1.3 共面非开普勒径向机动
目前太空中的飞行器绝大部分轨道运动都遵循1610年提出的开普勒定律,重点考虑地球中心引力场下的飞行器轨道运动.随着航天技术的发展、太空在轨服务需求的不断拓展,有越来越多紧急、复杂、大范围和多作业形式的空间操控任务需要飞行器去完成.这样,是否能够依任务需要直接、快速机动至目标轨道便成为当前制约任务完成效率的关键因素.基于开普勒定律和开普勒空间轨道理论的机动模型具有机动轨道模式固定、运动时间长以及持续推力运动难描述等局限,难以适应直接、快速和持续推力下的空间机动行为.未来太空在轨服务不仅要求飞行器能够顺利抵达目标轨道,更加注重变轨机动的快速性、直接性、可控性和全域可达性,这致使整个运动不再完全满足开普勒定律.我们定义一切不再符合理性开普勒运动的太空机动为非开普勒运动,即为不再符合开普勒三定律或二体问题解的太空运动.在动力装置持续推力作用下,将改变飞行器质心运动的轨迹,即转移轨道不再是开普勒轨道,而是受不同的瞬时加速度做螺旋、弧线或折线甚至直线轨迹[13,14].本文将抛开开普勒定律限制,考虑轨道间最直接的机动方式,采取在径向方向给予持续推力的方式使飞行器在径向产生加速度,从而更快到达目标轨道.
设在地球引力场中不考虑摄动因素,飞行器在地球万有引力下做圆周运动,即只受法向方向的引力FG.现依据目标轨道方位通过动力系统产生一个持续发动机推力F,该F可分解为径向分力Fh和切向分力 Fs,由此可求得飞行器的合加速度[15,16]:

式中,m为飞行器质量,rd为法向(径向)单位矢量,sd为切向单位矢量.设M为地球质量、G为引力常量、r为飞行器初始轨道半径,把μ=GM、FG=GMm r2[17]代入式(7),得到径向方向的瞬时加速度模型:

2 共面多轨道间的机动规划方法
飞行器为完成共面多轨道间机动任务需结合动力系统特性和携带燃料量选取合适的变轨机动方式,以最短时间机动到目标轨道.其中,轨道高度不同则速度不同,相互间变轨机动所需的速度冲量也就不同,速度冲量的增加虽可有效缩短机动时间,但却会消耗更多燃料.因此,飞行器在轨道间采取各变轨机动行为之前,需要将各方面因素统筹考虑,构建规划模型,设计适用、高效的寻优算法.
2.1 目标优化函数模型
面对任务执行度、飞行装置动能转换率和携带燃料量等多优化需求,从紧急机动角度选取最重要因素作为优化目标.据上文分析可知,紧急在轨服务任务的完成度主要还是受整个轨道间机动时间影响,时间就是生命,只有在机动上节省更多的时间才能在每个任务点上留有更充分的操控时间.因此,在共面多轨道间的机动规划问题上,选取整个机动时间为优化目标并构建目标优化函数:

式中:tij为从i轨道机动至j轨道的时间,单位为s;xij为i轨道与j轨道间转移轨道的选取情况,为无量纲量;N为需访问的轨道总数,单位为条.
2.2 变轨机动约束模型
变轨机动前需选定变轨方式,依上文分析可大致分为开普勒运动和非开普勒运动,具体选取依动力装置性能、任务紧急程度和燃料储量而定.根据开普勒运动的轨道根数、速度冲量、轨道转移周期以及机动时间的动力学关系,建立开普勒高斯变轨机动约束模型:

式中,aij为从i轨道机动至j轨道的转移轨道长半轴,单位为km;Eij为ij轨道间转移轨道的偏近点角,单位为度;eij为ij轨道间转移轨道的偏心率,为无量纲量;vij为i轨道机动至j轨道的转移轨道近拱点速度,单位为k∕ms;Δvij为i轨道机动至j轨道的速度冲量,单位为k∕ms;Δυ为基于共面霍曼速度冲量的速度增量,单位为k∕ms.
非开普勒运动轨迹主要由飞行器在径向及切向方向上的瞬时加速度共同决定,轨道间机动时间主要受径向方向的加速度控制.由此,重点考虑径向方向机动情况,选取均变速径向机动这一特殊情况建立非开普勒变轨约束模型:

式中,αij为从i轨道机动至j轨道的径向合加速度,单位为km∕s2;rij为从i轨道机动至j轨道过程中距地心的径向距离,单位为km;为i轨道机动至j轨道过程中的径向发动机推力,单位为N;vi0为i轨道机动至 j轨道的径向初始速度,单位为 k∕ms;vij为i轨道机动至 j轨道的机动速度,单位为 k∕ms;sij为i、j轨道间机动的径向累计路程,单位为km;tij为从i轨道机动至j轨道的时间,单位为s.
2.3 变轨路径约束模型
飞行器面对共面多轨道,需事先明确访问各轨道的先后顺序且每个轨道只访问一次.这是一类组合优化的问题约束,即针对每一目标轨道需明确:仅经由一条转移轨道进入和一条转移轨道离开,整个转移轨道构成一个转移链,中间没有任何子回路的产生.由此,构建整个变轨机动的路径约束模型:

式中,当xij=1时,选取ij轨道之间的转移轨道,其他则不选取.
2.4 变轨燃料约束模型
有的太空轨道间距较远,航天飞行器自身燃料补给困难,机动过程中必须考虑燃料的消耗情况.可将每次变轨机动前后速度矢量改变量的模,即速度增量的大小作为轨道控制所付出能量代价的一种间接度量.基于动量守恒原理齐奥尔科夫斯基给出了速度与燃料损耗的关系理论[18,19],即航天飞行器通过一个消耗自身燃料质量的反方向推进系统,可以在原有运行速度上产生并获得加速度.由此,构建轨道间机动燃料约束模型:

式中,vij为i轨道机动至j轨道开普勒运动的近拱点速度或非开普勒运动的机动速度,单位为km∕s2;β为从i轨道机动至j轨道过程中燃料转换率,是由动力系统决定的常量;λ为i轨道机动至j轨道过程中燃料燃烧后喷出的能量相对火箭的速率,单位为km∕s;mq为飞行器本体的质量,单位为kg;mr为飞行器所携带的燃料总量,单位为kg;mij为从i轨道机动至j轨道所消耗的燃料,单位为kg.
2.5 机动策略寻优算法
根据所建立的机动规划模型,设计基于改进蚁群算法的机动策略寻优算法.算法中根据要访问的轨道数量设计蚂蚁数,其中每只蚂蚁具有特征:根据以每次变轨机动时间和转移轨道上外激素的数量为变量的概率函数,选定下一个访问轨位;强制蚂蚁遵循合法路径搜索,不重复访问、不走小环路,并由禁忌表进行控制;完整一次搜寻后,在曾经访问的每一条转移轨道用外激素标记.算法起始时刻,设各轨道间转移轨道所携带的信息素相等,各蚂蚁在搜索中根据转移轨道上的所需的机动时间决定转移方向,并按转移概率模型机动至下一轨道.遍历完所有轨道后,蚂蚁完成一次循环,根据外激素更新模型[20]修改轨迹强度,并以燃料消耗情况审查进行约束.整个解算流程如图3所示.

图3 基于改进蚁群算法的机动策略寻优算法流程图Fig.3 Flow chart of maneuver strategy optimization algorithm based on improved ant colony algorithm
3 算例求解与分析
算例是以航天飞行器在赤道面上的七条轨道间往返执行在轨服务任务为背景,将七条轨道简化为圆形轨道,各轨道的距地球面高度集为:{r1=36300;r2=36700;r3=37200;r4=37800;r5=38500;r6=39300},单位为km.航天飞行器本体质量mq=1× 103kg,携带燃料 mr=4×103kg,装备最大推力为Fmax=39.3kN的肼燃料改进型火箭发动机,动力系统喷口速率λ=3km∕s,采取非开普勒径向机动方式时径向方向最大合加速度αmax=6×10-3km∕s2,地球引力常数 μ =398600.4km3∕s2,地球半径rε=6378.14km.现需此飞行器在这七条轨道依序开展紧急在轨服务任务,其中预留的轨道间总机动时间只有2.5小时,且要求燃料最少结余50公斤以保障在轨操控任务的顺利开展.
3.1 两类变轨方式的机动时长及燃料消耗情况
轨道间采取高斯机动过程中,增大速度冲量将有效提升机动时效性,但燃料消耗也有所增加.图4仿真展现了r0机动至r1时长随速度冲量增大呈非线性递减的情况,及两轨道间燃料消耗随速度冲量增大呈非线性递增的情况.

图4 高斯机动中时间、燃料变化情况Fig.4 Time and fuel variations in Gauss maneuver
当轨道间采取非开普勒径向机动时,使航天飞行器在径向方向保持不同合加速度,其机动时间和燃料消耗情况均有所不同.图5展现了初始轨道r0在径向方向采取不同合加速度机动至r1轨道的机动时间、燃料消耗情况.其中,机动时长随径向合加速度增大呈非线性递减趋势,燃料消耗量随径向合加速度增大呈非线性递增趋势.
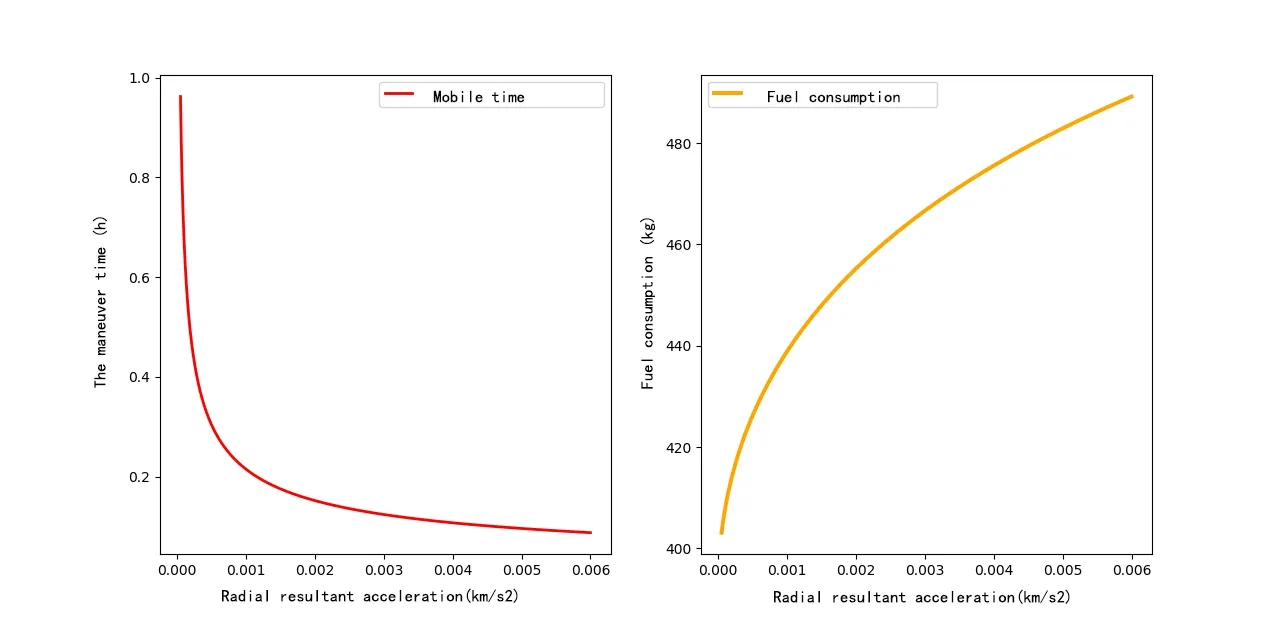
图5 非开普勒径向机动中时间、燃料变化情况Fig.5 Time and fuel variations in non-Keplerian radial maneuver
3.2 四种特殊情况的最优机动方案
如表1所示,为四种特殊变轨机动方式下的最优机动方案.其中,采取开普勒霍曼机动时,各轨道间的转移轨道均为与目标轨道相切的椭圆轨道,例如r3至r4的转移轨道形态为长半轴为41.178×103km、短半轴为41.177×103km的椭圆.通过规划方法得到时间最优的机动策略,整个机动过程所需时间为136.5小时,燃料消耗量为243.77公斤.
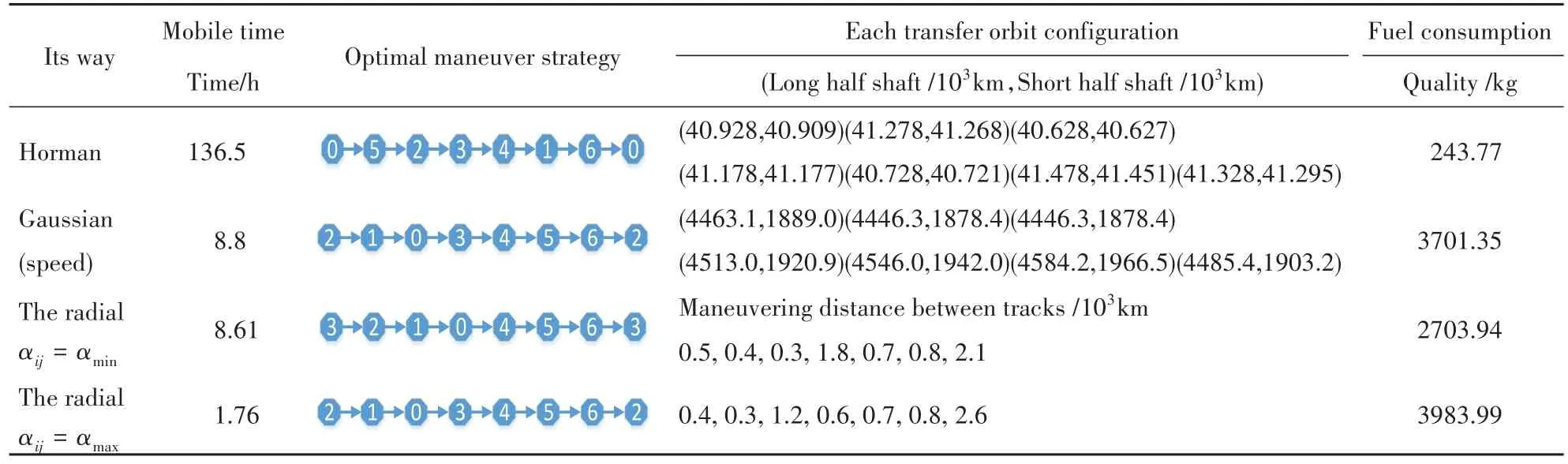
表1 考虑不同变轨方式的最优机动方案Table 1 Optimal maneuver scheme for different ways of orbit shifting
轨道间的速度冲量受初始轨道高度限制,由此可以确定各速度冲量的极限值.当采取极限速度下的高斯机动时,各轨道间的转移轨道都是在不同程度上与目标轨道相交的椭圆轨道,例如r3至r4的转移轨道形态为长半轴为4513.0×103km、短半轴为1920.9×103km的长条形椭圆.由于轨道间机动时间受初始轨道高度、速度冲量影响,当速度冲量改变则轨道间的机动比较优势将可能有所变化.通过规划方法可以得到当前环境下的最优机动策略,即由2号轨道经1号、0号、3号、4号和5号机动至6号轨道.整个机动过程所需时间为8.8小时,燃料消耗量为3701.35公斤.
将轨道间机动分解为径向运动跟切向运动,只有当径向方向运动率先与目标轨道交会才能将整个机动时间以径向时间计算.由此,径向机动存在一个最低合加速度,只有当大于等于此临界值时整个机动时间才能以径向机动时间计算.根据轨道间切向运动的特性,结合轨道几何关系及各初始轨道速度,可确定径向合加速度的最小值.根据本算例轨道条件,计算得到径向最低合加速度为αmin=0.25×10-3km∕s2.基于此,轨道间的径向机动累计路程为两轨道的轨道高度差,例如r3至r4的机动路程为600km.通过规划方法计算得到时间最优的机动策略,即由3号轨道经2号、1号、0号、4号和5号机动至6号轨道.整个机动过程所需时间为8.61小时,燃料消耗量为2703.94千克.
根据算例所给条件,当在径向方向保持最大合加速度αmax=6×10-3km∕s2机动时,两轨道间的径向机动累计路程为两轨道的轨道高度差,例如r3至r4的机动路程为600km.通过规划方法计算得到时间最优的机动策略,即由2号轨道经1号、0号、3号、4号和5号机动至6号轨道.整个机动过程所需时间为1.76小时,燃料消耗量为3983.99千克.
3.3 时间及燃料约束给定的最优机动方案
根据算例对机动总时长控制在2.5小时内、燃料结余50公斤的要求,通过本文方法计算,最终得到了如表2所示的最优机动方案.轨道间在径向保持合加速度做径向均变速机动,采取由2号轨道经1号、0号、3号、4号和5号机动至6号轨道的最优访问策略;整个机动时间为2.22小时,满足2.5小时内完成轨道间机动的任务要求;燃料消耗3949.12公斤,满足结余50公斤燃料的在轨服务任务要求.

表2 时间及燃料限制条件下的最优机动方案Table 2 Optimal maneuver scheme under time and fuel constraints
从整个计算过程知:开普勒机动过程中,速度冲量决定了转移轨道形态,速度冲量的增加能缩短轨道间机动时间;通过在各初始轨道增加其速度冲量至极限值,可压缩93.6%的机动时间,但需多消耗15倍的燃料.非开普勒径向机动中,在径向保持最低加速度进行机动,机动时间跟极速高斯相近,由于其机动方式直接且所需速度相对较小,从而整体能够节省1000kg燃料;提升径向加速度至算例所给极值,可有效压缩79.6%机动时长,但需再多消耗3.9倍燃料.针对机动时间2.5小时内及燃料结余50公斤的条件限制,综合考虑不同机动方式,本文给出了采取非开普勒径向机动方式的最优方案.
由此,多轨道间机动采取开普勒方式,整体相对节省燃料,但所需的机动时间较长,适用于携带燃料量有限或任务时间较宽松的情况.采取非开普勒机动方式,可进一步缩减机动时间,适用于燃料充足或任务紧急的情况.从应急角度看,是需要飞行器以这类方式按最优机动策略,在最短时间内直接完成多轨道间机动的.但非开普勒运动中,合加速度的提升、推力大小的维持及飞行方向的控制均对飞行器的动力系统、燃料储备和飞行控制提出了更高的要求,这急需航天技术进一步发展以提升空间全域快速机动能力.
4 结论
(1)提出了共面多轨道间机动规划方法,能够根据具体需求给出最优机动策略.
(2)研究了两类变轨机动方式四种特殊情况的边界问题,有助于受时间及燃料限制机动问题的变轨方式选取.
(3)提出了非开普勒径向机动方式,能够有效缩减轨道间机动时间,满足高时效性要求.
综上,本文方法能够为受时间及燃料条件限制的共面多轨道间机动问题,提出一个综合考量不同变轨方式的最优机动方案.
