基于语音识别的智能搬运小车设计
2021-09-26张璇
张 璇
(江苏联合职业技术学院常州铁道分院,江苏 常州 213011)
近年来随着人工智能、互联网技术的快速发展,语音识别作为重要的人机交互技术,应用越来越普遍。智能搬运小车是基于树莓派设计制作的,由摄像头识别系统、机械臂系统、直流电机调速系统、雷达避障系统、语音识别系统等部分组成。产品以树莓派为核心控制单元,利用语音识别模块实现人机交互,实现智能小车在不同模式下工作。以光电传感器和摄像头等为输入设备,以步进电机和机械臂为输出设备。通过PWM波控制,实现小车自动直行,轨迹跟踪时通过光电开关沿轨迹跟踪,并能根据雷达探测实现智能绕行障碍物。当小车达到目的地执行物品的搬运功能时,以摄像头采集数据,通过视觉技术判断物品的种类,控制机械臂完成物品的抓取、分类及运送。
1 智能搬运小车设计的关键技术
1.1 采用PWM调速法实现小车的速度变化
小车四轮采用四组直流电机,树莓派通过两组驱动板控制分别驱动左右两轮的电机。右转时,左轮电机转速高于右轮,反之则向左转。为了能控制车轮的转速,采用PWM调速法,即由输出一系列频率固定的方波,后经过功率放大再控制电机。PWM波的占空比决定了四个电机上所得电压的高低,从而实现不同的转速。
1.2 采用四组光电开关实现小车的自动循迹
四组光电开关配合控制小车运行方向,遇到车辆超速脱轨时,光电开关根据先后检测到黑线的顺序,做出正确的转向调整。
1.3 采用雷达传感器实现小车的避障
雷达传感器通过函数检测出与障碍物的距离,调用子函数功能改变四轮电机的转速,左右电机转速差配合实现小车的前进、倒退、转弯等功能,最终实现避开障碍物。
1.4 采用摄像头技术实现信息采集
摄像头采用上位机进行数据处理。通过采集书本封面的颜色(二维码),利用机械臂来分拣出书的类型,将不同的教材分类堆放,完成教材的分拣工作。
1.5 采用坐标算法实现机械臂的定位
通过参考绝对坐标算法编写机械臂动作程序,小车参考绝对坐标系后,启动机械臂抓取书本,放到车上,然后将不同的书本分批次运输到不同地点。
1.6 采用语音识别平台实现语音信息采集
利用STT模块实现语音识别从而实现智能小车的语音控制,STT模块目前有多家公司有开源项目可以使用,比如Google、百度、讯飞等。本文选用百度的API接口。
2 产品的硬件设计
硬件系统设计包括主控板、雷达、摄像头、直流电机等硬件设备的选型和驱动板电路的设计,并实现了各个硬件之间的连接和通信。硬件结构系统框图如图1所示。
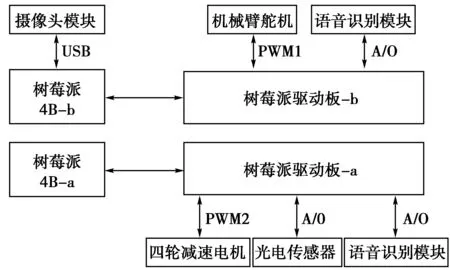
图1 硬件结构系统框图
(1)嵌入式主控制器:采用树莓派4B开发板,该开发板是一款基于 ARM 的微型电脑主板,以 SD/MicroSD 卡为内存硬盘,板载1-4GBDDR4内存,增加USB 3.0端口,双micro HDMI端口,支持4K输出,支持千兆位连接(125 MBps),microSD卡插槽的速度最大可达50 MBps。
(2)摄像头:产品采用的摄像头为带广角镜头的免驱USB摄像头,无畸变,有利于精确识别书的种类。
(3)舵机:产品使用的舵机能提供 PWM 接口,供电电压范围为DC 6~8.4 V,定位精度为±0.2°,工作过程中主要负责机械臂的升降、抓取等动作。
(4)光电传感器:系统使用的光电传感器型号为E18-D80NK-N,是一种集发射与接收于一体的光电传感器,发射光经过调制后发出,接收头对反射头进行解调输出。有效地避免了可见光的干扰。透镜的使用,使得传感器最远可以检测 80 cm 以内的物体。
(5)语音识别模块:系统中使用的语音识别模块为LD3320,它采用SPI通信接口,板载咪头和有源晶振,方便在电子产品中实现语音识别、声控和人机对话等功能。
3 产品的软件设计
智能搬运小车软件控制系统采用C语言编写。程序结构采用模块化编程,以便于灵活地实现变化的任务需求,如移动控制模块(包括路径规划)、夹取放置模块、二维码识别、物料颜色识别、任务分解计算等。
3.1 系统软件的总体设计
本智能语音控制系统采用机械臂+智能小车+树莓派+语音接口来实现,分为应用层、逻辑层和处理层。其中电气设备(机械臂+智能小车)作为应用层,负责系统的处理结果显现。树莓派作为逻辑层,处理业务逻辑上的问题,其中包括对处理层返回的识别后语音信号进行存储,以及采取相应的操作。百度语音接口作为处理层,对树莓派所录的语音信号进行识别,将识别后的语音信号再次返回给树莓派。系统软件结构框图如图2所示。
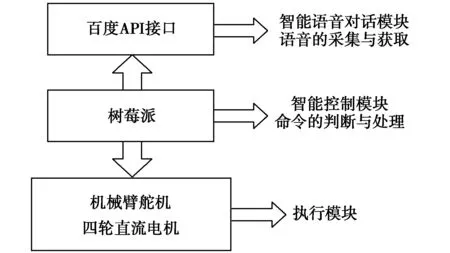
图2 系统软件结构框图
3.2 智能语音对话模块
通过百度API开放平台的语音识别接口和树莓派语音接口模块来实现对话的功能,只要能采集到使用者的语音信号(关键词),则做出相应的子程序跳转,实现相应功能。如果读取到“启动”,则程序跳转至智能控制“开始”模块。
3.3 智能控制模块
人机交互语音模块启动控制功能后,系统首先进行树莓派控制器和其他设备的初始化,控制智能小车运行至储物点。再由嵌入式控制器控制 USB 摄像头进行拍照,判断搬运物料的类别(形状控制、颜色控制),将处理结果发送给树莓派(Arduino)控制器,并控制机械手舵机进行装载,机械手完成装载任务,装载完成后小车执行循迹程序,利用光电传感器完成循迹并利用机械手舵机完成不同物料的分类堆放。产品软件控制流程如图3所示。
4 结束语
项目设计制作的智能物料搬运小车,由树莓派、音识别模块LD3320、机械臂及传感器输入设备组成,可以实现物料搬运任务的识别、物料的分拣与搬运功能。智能物料搬运小车根据实际需要,利用语音接口模块在不同功能模块之间切换,为物品智能化分拣、搬运提供了一种有效实用的解决方案。