城市轨道交通车-车通信系统融合设计
2021-09-24孔军,宋丹
孔 军, 宋 丹
(中车青岛四方车辆研究所有限公司,山东青岛 266000)
1 研究背景
目前,城市轨道交通运行控制系统主要采用基于通信的列车运行控制系统(CBTC),CBTC系统集先进的控制技术、计算机技术、网络通信技术为一体,具有系统化、网络化、信息化等特点[1-5]。但是在CBTC系统下,线路资源由联锁子系统以进路的方式进行统一调配,很大程度上影响了线路的运行能力。随着国家关于加快建设交通强国规划的推进[6-7],在城市规模不断扩大,都市圈和城市群不断发展的背景下,对城市轨道交通的运能提出了更高要求[8-10],因此,由联锁系统进行线路资源统一分配的运行控制系统所产生的问题逐渐凸显出来。在此背景下,基于车-车通信[11-15]的列车自主运行系统(Train Autonomous Circumambulate System,TACS)应运而生。TACS系统以列车为核心,将轨旁资源进行精细化管理,精简了系统架构和各系统之间的通信链路,使得列车有自己的“大脑”,实现车与车之间的协同控制,同时将车载设备和轨旁设备进行解耦,原有的联锁和区域控制器功能由车载控制器(Vehicle On-Board Controller,VOBC)实现,增设目标控制器(Object Controller,OC)进行线路资源占用情况的登记和解锁,进一步实现了信号系统的兼容性和易部署性。该系统保持以列车为核心,基于车-车通信实现列车主动进路与自主防护功能;在系统降级情况下,由OC实现非通信列车追踪、行车资源回收以及进路安全防护等系统降级功能。TACS地面设备与车载设备融合功能分配如图1所示。
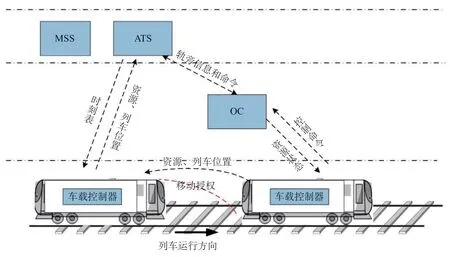
图1 TACS地面设备与车载设备融合功能分配示意图
尽管城市轨道交通车辆、信号核心控制系统已实现全面的自主设计和产品开发,但无论是CBTC系统还是TACS系统,在车辆控制方面都存在以下问题,制约列车智能化技术的发展。
(1)系统复杂。信号、牵引、制动、网络系统独立设置,各系统间壁垒明显,信息无法充分共享;车辆传感器、人机界面、网络通信设备等重复设置,成本高、可靠性低;车辆大量采用继电器、接触器,电路复杂、故障率高。
(2)智能化程度低。各系统之间的控制匹配度不高,导致制动距离长、冲欠标问题突出、闸瓦磨耗大等问题,影响运营安全,增加运营成本;列车自动驾驶系统(ATO)控车的输入信息单元控制链路长,导致车辆控制不精准,能源消耗大,智能化程度低。
(3)系统维护困难。复杂的系统和网络设置导致系统维护工作量大,系统智能运维需要采集大量的数据,既有网络带宽、数据处理方式不足以支撑智能运维等新技术需求。
本文以青岛地铁6号线工程为例,通过对该线TACS系统展开研究,以期为类似工程提供参考。
2 TACS 融合方案设计
根据TACS自主运行和智能化的总体要求,TACS融合设计的目标是以列车为控制核心,集成信号、牵引、制动、网络、防撞系统,从全系统层面开展一体化融合设计和功能再分配,实现列车级别的“控制大脑”,全面提升列车运行、维护和智能化水平。本文将从基于实时以太网的一体化网络管理、车载硬线融合、车载显示屏融合、速度信息融合、ATO与制动系统融合等方面介绍TACS融合设计方案。
2.1 基于实时以太网的一体化网络管理
TACS系统对网络结构进行了简化设计,采用实时多重冗余的百兆以太网,在通信速率提升2个数量级的同时满足安全性要求,符合IEC 61375-1标准[16],在此基础上实现通信信息的充分共享,以实时以太网为核心,融合了信号系统内网、制动系统内网、车辆维护网,将列车的主要智能设备统一纳入网络管理,减少车辆通信设备和跨车线缆。同时,由于各系统间可实现信息的充分共享,可有效缩短系统间通信链路。一体化网络管理架构如图2所示。
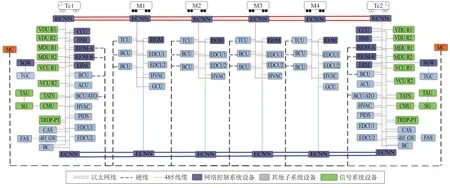
图2 一体化网络管理架构图
通过列车控制和管理系统(Train Control Manage System,TCMS)进行信息传输的优先级管理,保证关键安全信息处于高优先级,提高系统的实时性,通信周期缩短70%。TCMS为交互信息提供透明传输通道,接口安全由安全通信协议保证。
2.2 车载硬线融合
本文所提的TACS系统融合方案中大幅减少了信号系统输入/输出(Input / Output,I / O)接口数量,在保证安全的前提下,取消信号系统非安全继电接口,TCMS统一驱动采集并通过网络通信实现信息共享。同时减少了16类I/O硬线的使用数量,由TCMS集中检测车辆状态,使得整个系统易于维护。表1为信号系统非安全继电器接口形式对比,通过车辆以太网来代替安全继电器、电流环、多功能车辆总线(MVB),功能实现方式统一,结构精简。表2为信号系统I/O信号融合前后对比,通过数字量输入(DI)和数字量输出(DO)来代替钥匙激活状态、牵引制动手柄位置、门控状态、驾驶模式等信息,将多种信号融合成一种数字量信号,使得通信更加简单高效。

表1 信号系统非安全继电器接口形式对比表
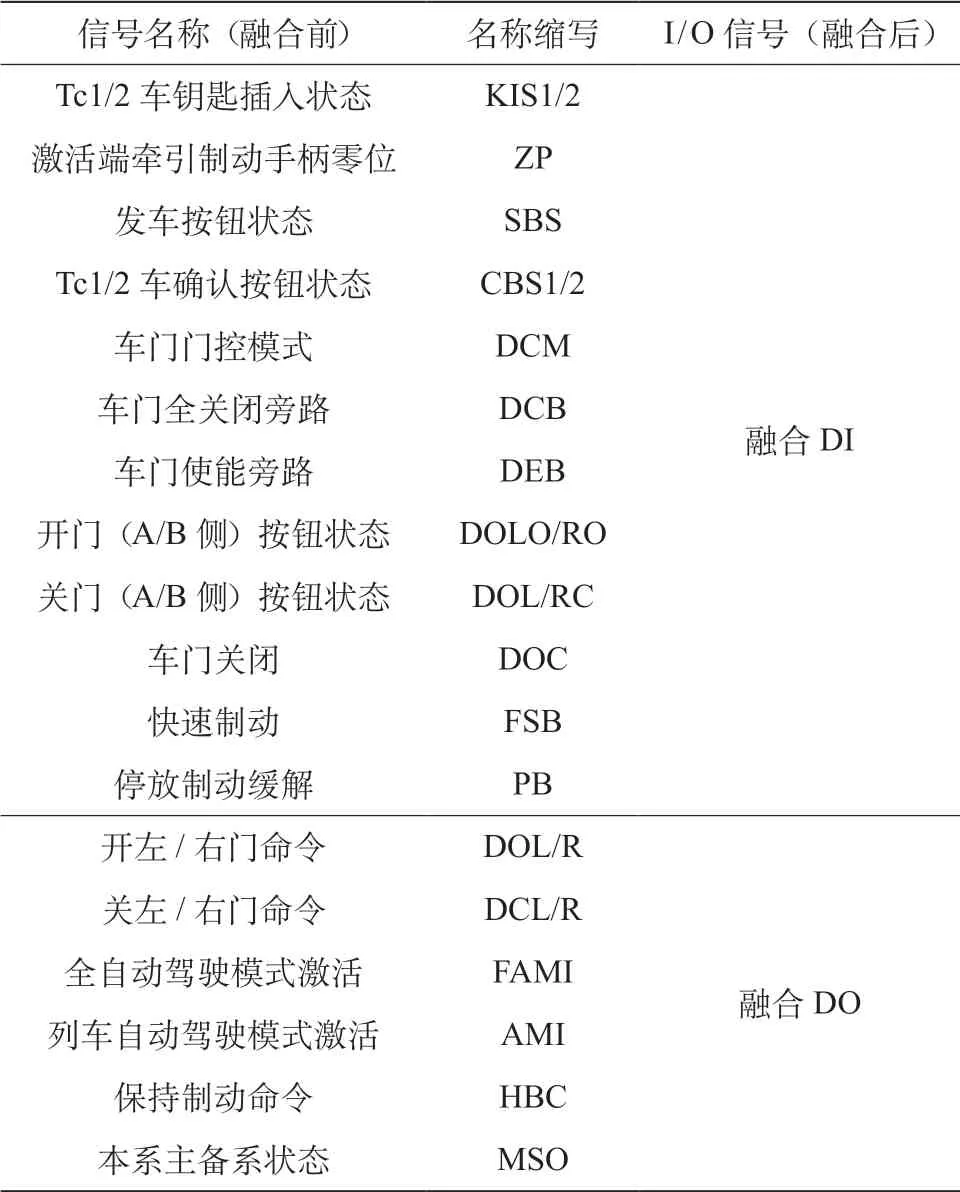
表2 信号系统I/O信号融合前后对比表
2.3 车载显示屏融合
本文所提的TACS系统融合方案中将司机显示界面进行了一体化设计,将信号显示屏(DMI)与网络显示屏(HMI)合二为一,由1个17.3英寸的显示屏统一呈现车辆状态和列车运行信息,如图3所示。信号与TCMS数据信息并网传输,简单、直观、信息全面、易操作。

图3 TCMS和信号系统融合屏幕
屏幕左侧包括行车模式、信号运行模式、列车速度、站点信息、车门指令及其他信号相关信息。屏幕右侧包括车门、牵引、辅助、制动、网压、故障及其他车辆相关数据信息。
2.4 速度信息融合
传统的信号系统与制动系统分别使用各自的速度传感器和齿轮盘,本文所提的TACS融合系统,信号系统与制动系统共用速度传感器与齿轮盘,整车节省4个速度传感器及对应齿轮盘。另外,制动系统向信号系统发送各轮轴速度,信息充分共享,优化信号系统速度。
信号系统向制动系统发送轮径校正应答器信息,制动系统据此实现自动轮径修正。信号系统与制动系统速度信息融合前后对比如图4所示。
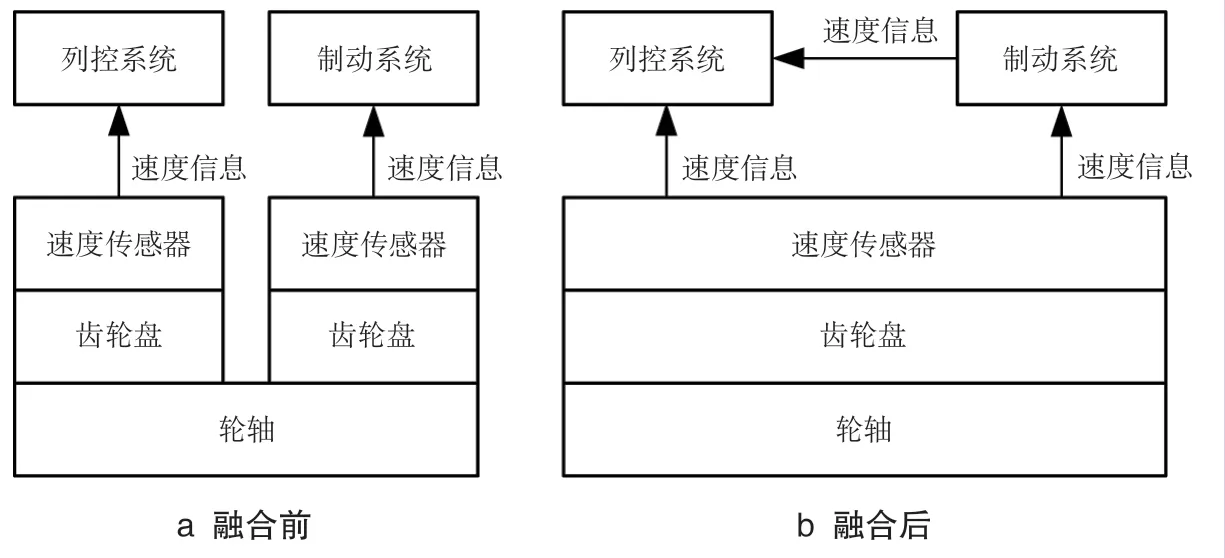
图4 速度信息融合前后对比图
2.5 ATO 与制动系统融合
ATO与制动系统融合前架构如图5所示,传统的信号系统中,ATO利用采集的速度、位置信息进行列车运行的闭环控制,通过TCMS等设备控制牵引制动系统,通信链路长,产生较大的通信延时,导致ATO控车困难。

图5 ATO与制动系统融合前架构图
本文提出的TACS系统融合方案中,ATO与制动系统融合后架构如图6所示,ATO板卡集成至制动系统机箱中,两者通过背板直接通信,缩短控制链路,减少中间环节,制动延时减少了150 ms,有效提升控制实时性。
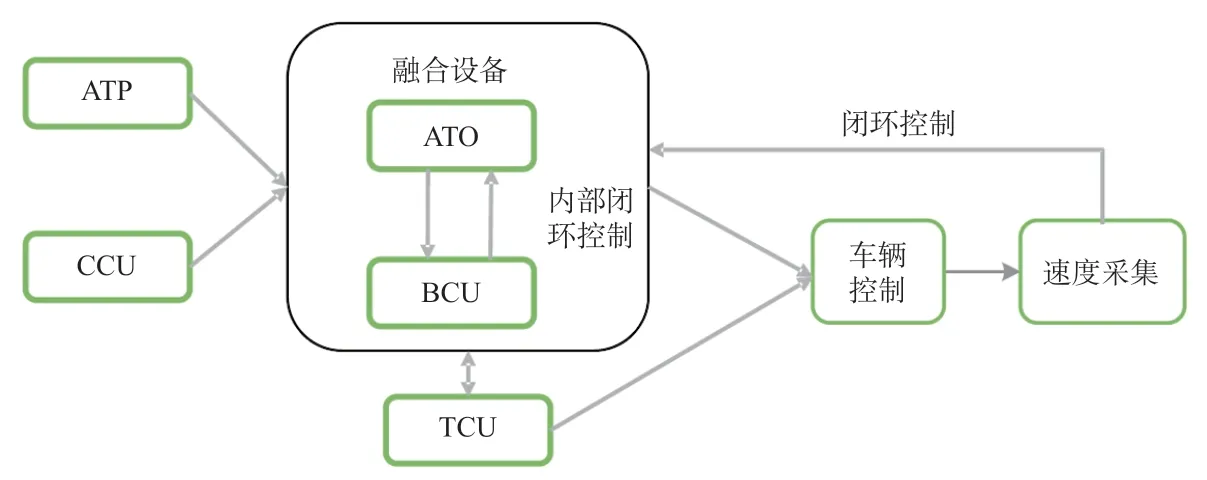
图6 ATO与制动系统融合后架构图
另外,车辆向ATO提供必要的列车状态信息,包括牵引、制动能力/状态等,形成控制指令与状态采集的内部闭环,停车精度、车辆冲动抑制水平、节能运行等ATO性能得到进一步优化。
3 实验室一体化集成调试
中车青岛四方车辆研究所有限公司在国内首次联合搭建了TACS系统一体化集成调试环境,作为多系统一体化设计和工程化调试平台,可以实现包括牵引、制动、网络、信号、供电、动力学在内的车-网-路一体化仿真验证。
在该平台中,车辆各系统和信号系统均采用真实软硬件,在实验室即可完成车辆-信号的接口测试和功能测试,此外,牵引制动实时仿真器能够最大程度仿真特定车辆的实际运行特性参数,可调试优化ATO自动控车性能,还可以利用弓网仿真等开展列车节能技术的研究。TACS系统一体化集成调试环境架构如图7所示。
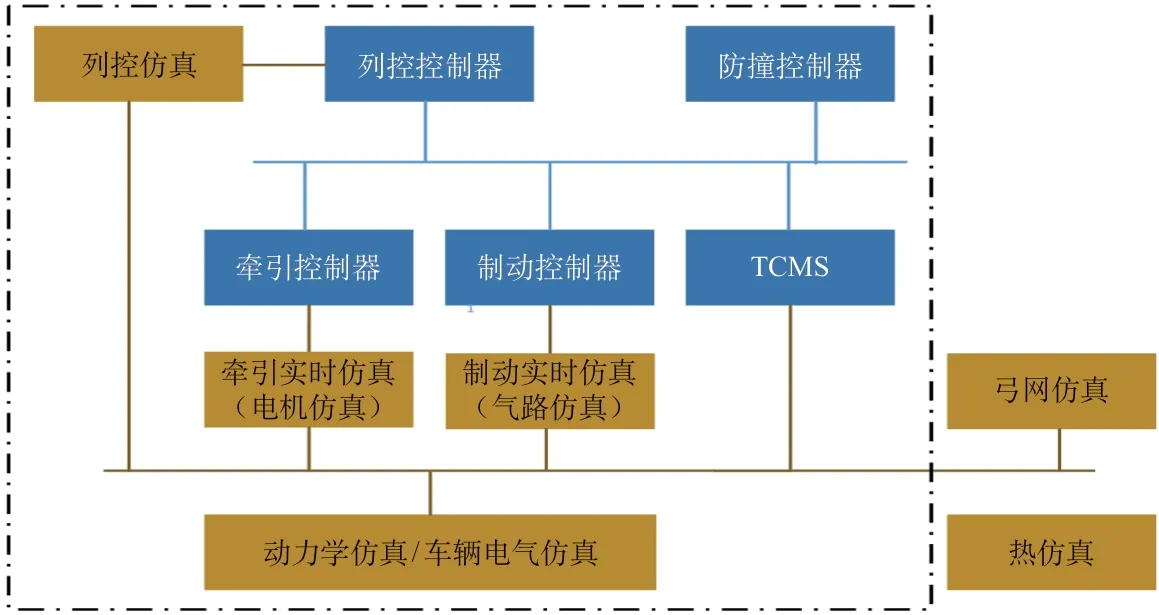
图7 一体化集成调试环境架构图
通过一体化集成调试环境可以对整个车-网-路系统进行仿真测试,进行系统融合后的TACS系统,轨旁设备减少10%,车载设备减少10%,仿真环境安装部署简易,设备机柜占地面积减少15%,轨旁功能简化,轨旁设备调试工作量小,整体安装调试工作量可减少30%。车辆系统与信号系统深度融合,可在实验室完成调试工作,列车现场调试工作量以及维护工作量可减少30%。
4 结论与展望
TACS系统作为更加高效的下一代城市轨道交通运行控制系统,其优点在于简化了系统架构,使得系统更加轻量化,提升了运行能力。但是从整车角度来看,各系统之间的壁垒仍然存在,本文将TACS系统进行融合设计,提出基于实时以太网的一体化网络管理,将车载硬线、车载显示屏、速度信息、ATO与BCU进行融合设计。基于轨道交通装备全自主化技术,以列车自主控制为核心,以提升整车可靠性与运营效率、降低成本为目标,聚集全行业力量深入开展整车一体化融合,并在此基础上结合智能化技术实现车辆控制领域的融合创新。
