国际空间站的新“手臂”:欧洲机械臂
2021-09-23迟惑
文/ 迟惑
7月21日,欧空局研制的“欧洲机械臂”总算从拜科努尔空间中心发射升空,成为继加拿大臂2、日本机械臂、中国空间站机械臂之外,太空中第四个大型机械臂。为了这一天,欧空局已经等了20年。
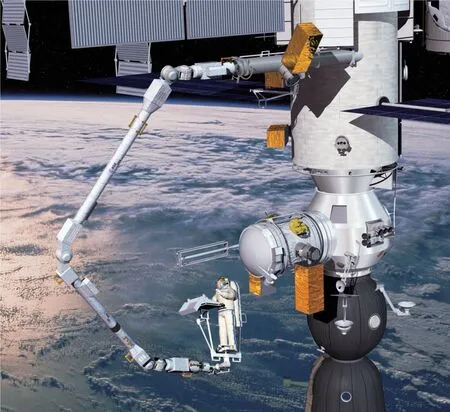
欧空局设想的未来欧洲机械臂舱外活动支持模式
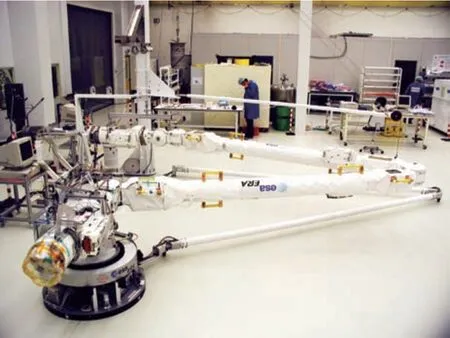
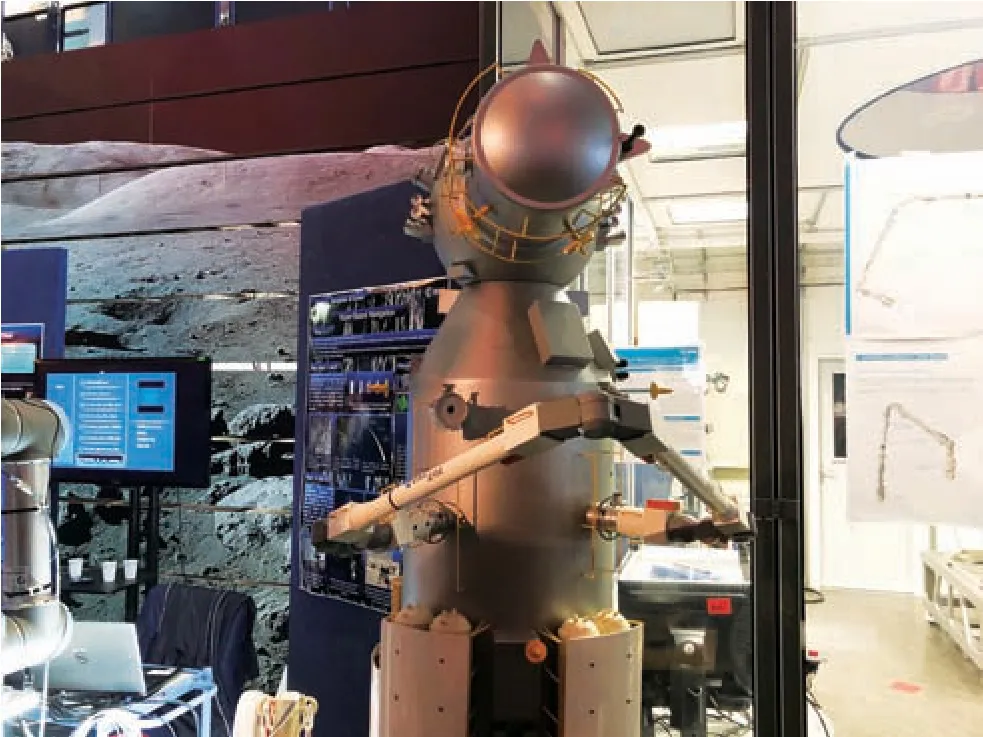
测试中的欧洲机械臂

俯视欧洲机械臂和“科学号”的结合过程
总算上天的欧洲机械臂
欧洲机械臂(ERA)是由荷兰航天公司总承包,欧洲阿斯特里姆公司(如今的空客防务公司一部分)、SABCA公司和Stork公司分包。欧洲机械臂最初打算在2001年用航天飞机发射,安装在国际空间站的俄罗斯模块上。但是因为研制进度推迟、航天飞机退役,发射任务只能转给俄罗斯质子火箭,随俄罗斯科学号多用途实验室舱(MLM)发射。“科学号”一度打算在2015年发射,但一再推迟,最后就拖到了2021年。一个重点型号推迟20年才上天,这种事情也只会发生在欧洲这种什么事情都要国际协调的机制下。
欧洲机械臂长约10米,质量约为620千克,由 7 个关节、 2 段手臂和2套末端效应器构成。和“加拿大臂2”以及中国机械臂一样,欧洲机械臂采用了两端对称设计,两段手臂两端各有一个完整的3自由度腕部和末端效应器,让欧洲机械臂可以在空间站的基点之间爬行。它主要用于俄罗斯舱段部分外挂设备的在轨装配,如安装隔热板、拓展气闸舱,并开展其他舱外服务,这些辅助功能将降低航天员在太空行走时的难度。
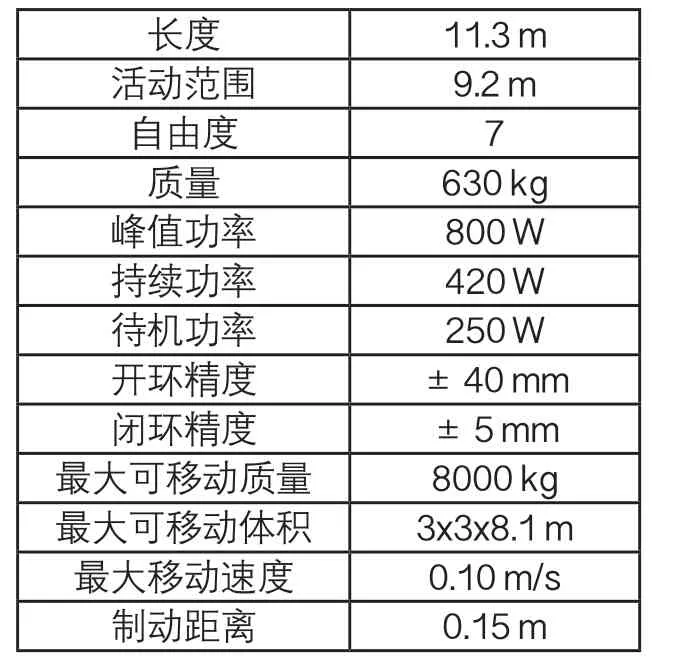
主要技术特性
欧洲机械臂的结构
欧洲机械臂主要包括以下主要部件:

即将与“科学号”结合的欧洲机械臂
欧洲很早就展出了“科学号”与欧洲机械臂的结合模型
1.末端效应器组件(EES)。它是欧洲机械臂的“手”,但是其实没有手那么复杂。具体结构包括:抓斗机构(GM),包括基点(BP)和抓斗夹具(GF);综合维修工具(IST)(包括抓斗夹具上的插座);扭矩/力传感器(TFS),包括扭矩刚性机构(TRM)。

欧洲机械臂的舱外控制台

欧洲机械臂的手腕
2.机械臂关节组件(MJS)。它由3个模块化铰链组成,结构基本相同,只有卷轴部分不同。这3个铰链一起形成所谓的“腕”关节。其中包括:俯仰关节/偏航关节/滚动关节,位于臂的两端;肘关节使用与腕关节相同的基本硬件,但只有一个自由度。
3.发射固定机构。其作用是抑制发射过程中的意外运动。在俄罗斯“科学号”上的发射固定机构包括:固定钩和支撑垫,属于“科学号”的一部分;插销和支撑垫,是欧洲机械臂结构的一部分。航天员要通过舱外活动来把机械臂从发射支架展开,具体工作包括松开固定钩、激活一些特殊的机械特性。
4.服务型设备。主要包括:摄像机和照明装置(CLU),连接器匹配/取消匹配机构;太空行走人机界面,也就是各类开关和按钮;超越控制机构,在太空行走期间,航天员通过使用这些机构,可以超越电子控制设备,来手动控制欧洲机械臂的活动;太空行走时使用的可放置扶手。
功能强大的“手”
欧洲机械臂有两个末端效应器,就像两只手,虽然它们没有手那么复杂,但功能依然十分强大。在轨运行期间,一端的末端效应器连接到一个基点上,可以在舱段和欧洲机械臂之间提供足够的刚性连接,并为欧洲机械臂的运行提供电力、数据和视频信号。另一端的末端效应器用作抓取器,能够抓取配备有抓取夹具或基点的物体。此外,这个自由的末端效应器还要为整个欧洲机械臂提供扭矩/力值数据,来支持欧洲机械臂的正常安全运行,它还可以向被抓取的物体提供机械支撑和电力,以及数据传输。

欧洲机械臂的抓斗实拍

欧洲机械臂即将与“科学号”结合
为了实现上述能力,末端效应器被分配了以下功能:测量扭矩/力,抓斗/导向装置,电力、数据和视频传输,插入综合维修工具头以提供机械动力,提供足够的刚度。如果不需要测量扭矩/力,末端效应器就要保持刚性化。扭矩/力传感器的刚性化能力,对于在末端效应器充当“肩部”时所需刚度以及运输操作期间充当“手部”所需刚度,是必要的。

欧洲机械臂的肘部
1.外壳结构
末端效应器的主要承载结构,包括下壳体结构和带电子单元的外壳。下壳体结构由3个加强筋组成,在加强筋上附有盖板、接口环,以及导向装置。电子装置外壳上装有机械臂关节组件的滚动关节以及摄像头、照明装置的接口。外壳结构的所有零件均由高强度铝合金制成,接口环和导向装置由钛合金制成,主轴和挂钩由钢制成。
2.驱动和传感装置
驱动和传感装置由驱动装置、扭矩/力传感器和扭矩/力传感器刚性化机构组成。
驱动装置包括一个内部冗余的无刷式电动机、一组安装在电机轴上的冗余霍尔传感器、一个齿轮系和三个安装在移动平台上的带螺母滚柱螺杆组成。齿轮/电机组件同步驱动滚柱螺杆。三个滚柱螺钉螺母安装在平台上,具备有限的浮动能力,滚柱螺杆的旋转可以驱动平台向上/向下移动。
扭矩/力传感器是一个配备应变计的机电装置,它能测量6个自由度上的扭矩和力。采集到的模拟信号经电子装置采集和处理,并发送至臂上计算机。扭矩/力传感器具有温度补偿功能,并装有刚性端部止动块,防止机械过载。如果不需要扭矩/力传感器的测量功能,并且需要增加扭矩/力传感器的刚度,则用扭矩/力传感器刚性机构进行阻断。
扭矩/力传感器刚性机构用来阻止扭矩/力传感器工作。它动作的时候,会自动形成一个刚性结构,把末段效应器变成一个纯粹的固定设备。不需要刚性化的时候,它会形成柔性结构,以保护机械臂不过载。
3.移动平台
移动平台负责启动抓斗机构,负责集成维修工具头部插入工作,并匹配系统线束接头(用于电源、视频和数据线)。公插头将与位于基点/抓斗处的母插座结合,用3个冗余开关监测平台位置,为末端效应器电子单元提供状态信息。除了通过开关进行监控外,移动平台还可以随时通过执行器单元电机的霍尔效应传感器提供信号。
4.抓斗机构

欧洲机械臂

欧洲机械臂结构
抓斗夹具安装在所有要用末端效应器处理的物体上。每个抓斗夹具都装有连接器的母插座部分,通过这种插座,电力、信号和视频数据被路由到被抓取的对象上。此外,抓斗夹具上还装有综合维修工具头部插座,通过这个插座,可为被抓取的物体提供扭矩(例如拧紧/拧松)。欧洲机械臂的抓斗机构由3个钩/杆系统组成,可以耦合到移动平台上。抓斗机构在抓斗夹具或基点处拉动,直到它们和末端效应器之间的间隙闭合,然后抓斗机构刚性化并预紧。抓斗机构的挂钩由螺旋弹簧不断向外压,在抓斗夹具或基点的抓取过程中,当一个吊钩接触到障碍物时,由于弹簧产生变形,吊钩会产生约30牛顿的力。扭矩/力传感器测量到反作用力后,通过电子单元传输至臂上计算机。然后末端效应器将对抓斗夹具/基点重新定位,以减轻诱导载荷。

欧洲机械臂正在安装到“科学号”上

航天员正在为欧洲机械臂的来到接受训练
5.系统线束接头
安装在移动平台上的3个接头将在一侧的末端效应器和另一侧的抓斗夹具或基点之间传输电力、视频和数据。连接器通过浮动装置安装在移动平台上,以提供横向和角度偏差补偿能力。每个连接器都有提供监控匹配/未匹配状态的功能。
6.综合维修工具
综合维修工具用于为被抓物体提供扭矩,例如拧紧或拧松螺栓,或收起散热器组。综合维修工具安装在下端效应器室中,由电气冗余无刷电机、齿轮箱和带有弹出式装置的工具头组成。齿轮箱输出轴驱动综合维修工具插头,插入抓斗夹具处的插座中,为螺钉接口提供机械动力。
7.基点
基点在机械结构上与抓斗夹具相同。它们没有插座,但负责提供欧洲机械臂和舱段之间的所有系统线束连接。它们包含3个系统线束接头的内螺纹部分,用于欧洲机械臂的电力、信号和视频数据传输和路由分配。基点还提供了末端效应器一侧抓斗机构和另一侧俄罗斯舱段之间的机械接口。
灵活的“关节”
欧洲机械臂比大多数工业机器人灵活得多。手臂的主要弯曲模式很重要,因为它要控制超过90%的总转动惯量,是控制系统最主要的处理对象。欧洲机械臂结构紧凑、重量有限、刚度高、齿隙小、寿命长,需要在热真空环境中工作,对接头和铰链单元的研发提出了严峻的挑战。
手腕部分包含一个电子箱,独立驱动3个电机。电子箱中有两套印刷电路板实现冗余。肩关节和手腕各有单独的电子箱,用于实现供电和遥测功能。肘部的电子设备箱位于肢体之间的矩形长方体中,构成结构荷载的一部分。因此,箱形结构用肋板进行了加固。

欧洲机械臂终于成行
每个接头由以下机械元件组成:①电机装置:电机、分解器、关节位置传感器,用于将关节位置反馈给关节控制电子设备和制动器;②齿轮箱总成:用于扭矩传递和减速的四级行星齿轮系,包括轴承,润滑油/润滑脂;③电机外壳和轭架。此外,还为手动超控提供了太空行走时的访问权限。其他非机械元件包括:①电缆和连接器;穿过接头供外部使用的交叉线和连接至接头内电气元件的入口线;②热硬件、加热器;③电缆盖/连接器盖。

欧洲七自由度机械臂,也可以爬行

热真空测试中的欧洲机械臂
发射固定机构:“查理·卓别林”
欧洲机械臂固定在俄罗斯“科学号”的基座上发射。在发射过程中,两个末端效应器都抓住一个特定基点,用它们来充当负载悬挂系统。在轨道运行的休眠阶段,两个末端效应器也都要抓住一个基点。在这种配置下,所有的电气连接器都将与空间站相匹配。
固定机构被戏称为“查理·卓别林”,用6个发射固定机构固定在”科学号”上。每个固定机构包括两个挂钩,挂钩是可调的,欧洲机械臂上的啮合销不可调。挂钩上的预紧力为500~1000牛顿。在欧洲机械臂和固定机构之间留有间隙,以便于组装和适应热膨胀,也方便释放。固定机构分别位于肘关节、手腕电子箱和滚动关节上。
手动超控
为了方便安装和维护,欧洲机械臂保留了手动超越控制功能。所谓“超越”就是人超越计算机,直接控制机械设备。在末端效应器执行单元、集成维修工具和扭矩/力传感器刚性机构中,可以实现太空行走时的手动超控。但发射过程中,致动器装置和扭矩刚性机构的手动超控是不能工作的,以确保刚性机构处于关闭位置。在轨安装欧洲机械臂期间,必须解除发射闭锁机构。具体解除动作是,用超控工具插入致动器装置和扭矩刚性机构手动超控接口的六角插座中。通过第一次插入,位于六角形插座内的插销被向后推到解锁位置。闭锁装置确保插销在此后所有在轨操作期间保持在解除闭锁位置。

正在吊装到科学号上的欧洲机械臂
手动超控插入口和位置指示器平时用盖子覆盖,以防止阳光遮挡和热量泄漏。在启动太空行走超控装置之前,航天员必须将相关部分向后折叠,然后将其固定住。
欧洲机械臂由轻质的铝和碳纤维构成,能够移动和安装约8000千克的组件,末端定位精度可达5毫米。航天员能够从科学号实验舱内部实时控制手臂,或者对其进行预编程以自主执行任务。手臂的中间还有一个内置的中控计算机,太空行走过程中的航天员可以通过设备输入指令。机械臂还加装了脚限位器用来扩展航天员的出舱活动范围,辅助加成提高太空行走的工作效率。