北斗/GPS双频载波相位单点定位模型及精度分析
2021-09-23李金龙王爱兵朱恩慧袁红月
李金龙,王 冰,王爱兵,朱恩慧,袁红月
(北京卫星导航中心,北京 100094)
0 引言
随着国家海洋战略的逐步推进,占地球表面70%的广阔海洋区域的精密定位需求将日益增大。与陆地精密定位不同,海上精密定位无法通过与预先建立的基准点联测的方式来获得待定点的精确绝对坐标,也无法通过实时监测站网对海洋区域电离层延迟误差进行精确建模和预报。因此,双频无电离层组合实时精密单点定位(Precision Point Positioning,PPP)技术是海上精密定位最适合的技术手段[1-3]。
近年来,PPP技术发展日趋成熟,实时PPP技术已具备工程化条件[4-5]。目前,实时PPP服务主要有两种实现方式:一种是IGS-RTS服务[6-8],即国际GNSS服务(International GNSS Service,IGS)组织通过RTCM互联网传输协议(Networked Trans-port of RTCM via Internet Protocol,NTRIP)播发标准RTCM-SSR格式的精密轨道和钟差改正信息数据流,用户免费注册就可通过互联网获得相应的精密差分改正信息,结合用户观测数据即可实现实时PPP;另外一种是由商业公司提供的星基差分实时PPP服务[9],目前提供此类服务的公司主要有OmniSTAR、Trimble、Fugro、Nav-Com、C-Nav、Veripos、Terra-Star、Novatel和Hemisphere等。这类服务一般通过通信卫星在L波段播发自定义格式的实时精密差分改正信息,用户需购买支持这类服务的专用接收机才能获得实时PPP服务,而且还需定期缴纳服务费。这两种方式均可实现分米级至厘米级的实时动态定位精度,但第二种星基差分实时PPP服务技术发展更为成熟,目前已广泛应用于海底光缆敷设船、海上石油钻井平台动力定位系统和海上测量船等海洋工程精密定位应用领域。随着星基差分实时PPP技术发展越来越成熟,北斗三号和Galileo系统已将PPP服务作为系统标准服务之一,未来将成为海上精密定位的主要手段。
此外,还有学者研究了基于星基增强系统(Satellite-Based Augmentation Systems,SBAS)轨道和钟差改正信息以及基于广播星历和钟差信息的PPP技术[10]。2011年时,基于广域增强系统(Wide Area Augmentation System,WAAS)轨道和钟差改正数的全球定位系统(Global Positioning System,GPS)PPP精度可达0.5m,基于广播星历的GPS PPP精度在2m左右[11]。也有学者研究了基于广播星历的多天静态单点定位方法来获取绝对位置基准[12]。
考虑到实时米级绝对定位精度已经可以满足大部分海洋工程定位需求,而分米级至厘米级实时PPP技术实现复杂,且商业实时PPP服务费用昂贵,尤其是远海区域。目前,北斗三号系统PPP服务区域仅为亚太区域,Galileo系统PPP服务还在测试中,因此研究利用广播星历信息和双频载波相位与伪距观测量的实时单点定位技术实现米级绝对定位精度具有重要的现实意义和经济效益。本文通过简化PPP函数模型(不估计对流层延迟参数)、优化随机模型和忽略部分PPP误差改正项,从而实现基于广播星历的实时米级绝对定位。为与PPP技术区别,将这种定位方式称为载波相位单点定位技术。
1 双频载波相位单点定位模型
非差双频无电离层组合伪距和载波相位观测方程可表示如下
(1)

(2)
(3)
(4)


(5)
(6)

(7)
(8)

(9)
(10)
对于PPP,由于对各项误差均进行精确修正或建模,因此随机模型主要由伪距和载波相位测量噪声决定,一般伪距和载波观测量之间权比为1/100。而对于模型(7)和(8),由于广播星历误差、卫星钟差改正残余误差和对流层模型改正残余误差等影响,随机模型应该由观测误差和各项模型改正残余误差两部分组成,即有
(11)
(12)


表1 PPP与载波相位单点定位比较
对于北斗/GPS联合单点定位,忽略北斗与GPS坐标系统之间的差异,仅考虑北斗和GPS时间系统之间的差异,即估计2个接收机钟差参数。试验中,采用电离层残差组合法进行载波相位观测值的周跳探测,探测到周跳后不修复而是对模糊度参数项进行重新初始化。
2 数值验证
2.1 静态数据试验
静态试验数据为2017年年积日82~84共3d 14个测站数据,除北京架设的BSNC站外,其余13个为MGEX站,所有数据采样间隔为30s,数据处理时高度截止角设为10°。静态数据试验测站概况如表2所示,静态数据试验测站空间分布情况如图1所示,表3给出了试验期间14个测站北斗、GPS和北斗/GPS联合情况下的水平精度因子(Horizontal Dilution of Precision,HDOP)、垂直精度因子(Vertical Dilution of Precision,VDOP)和可见卫星数(NSAT)的平均值。
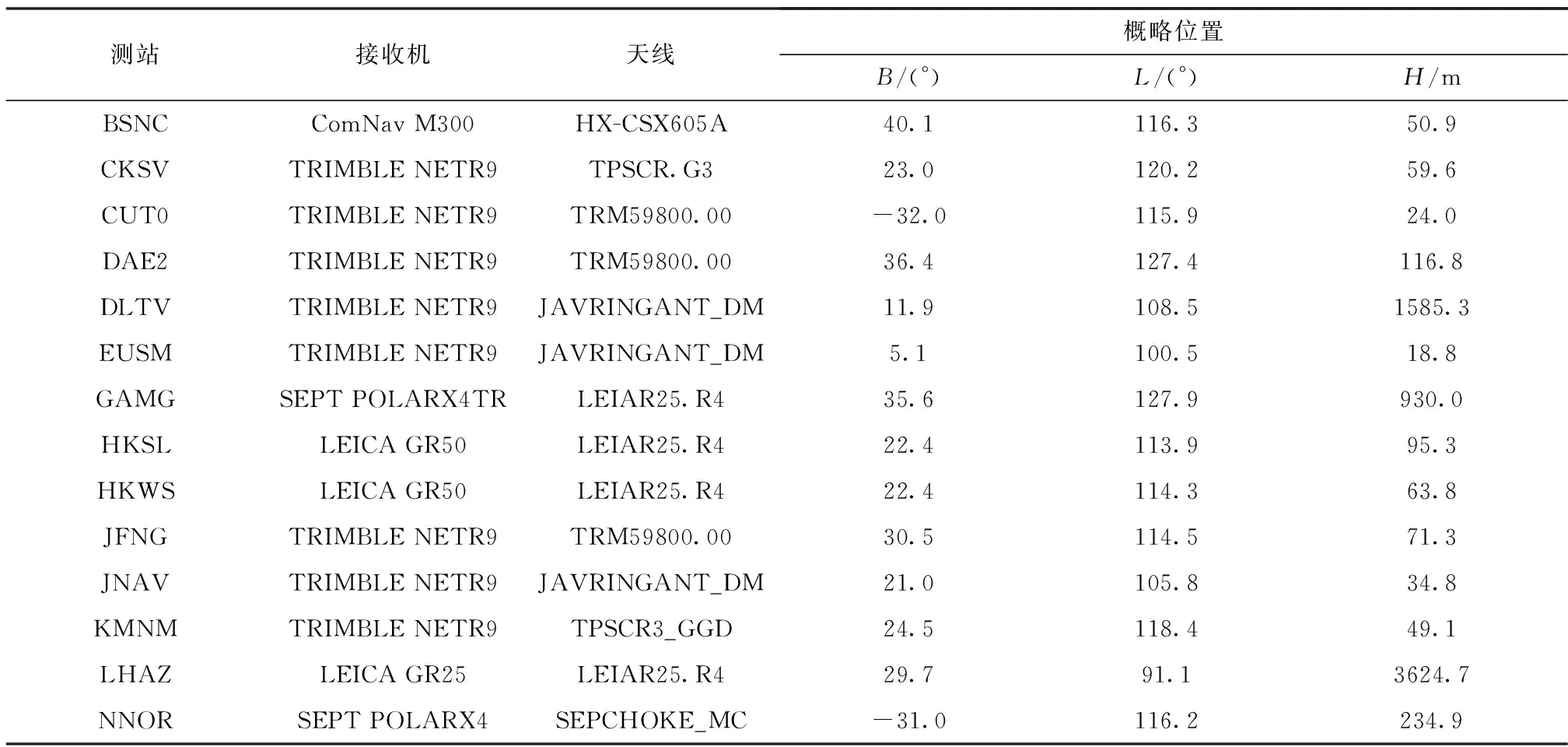
表2 静态试验测站概况
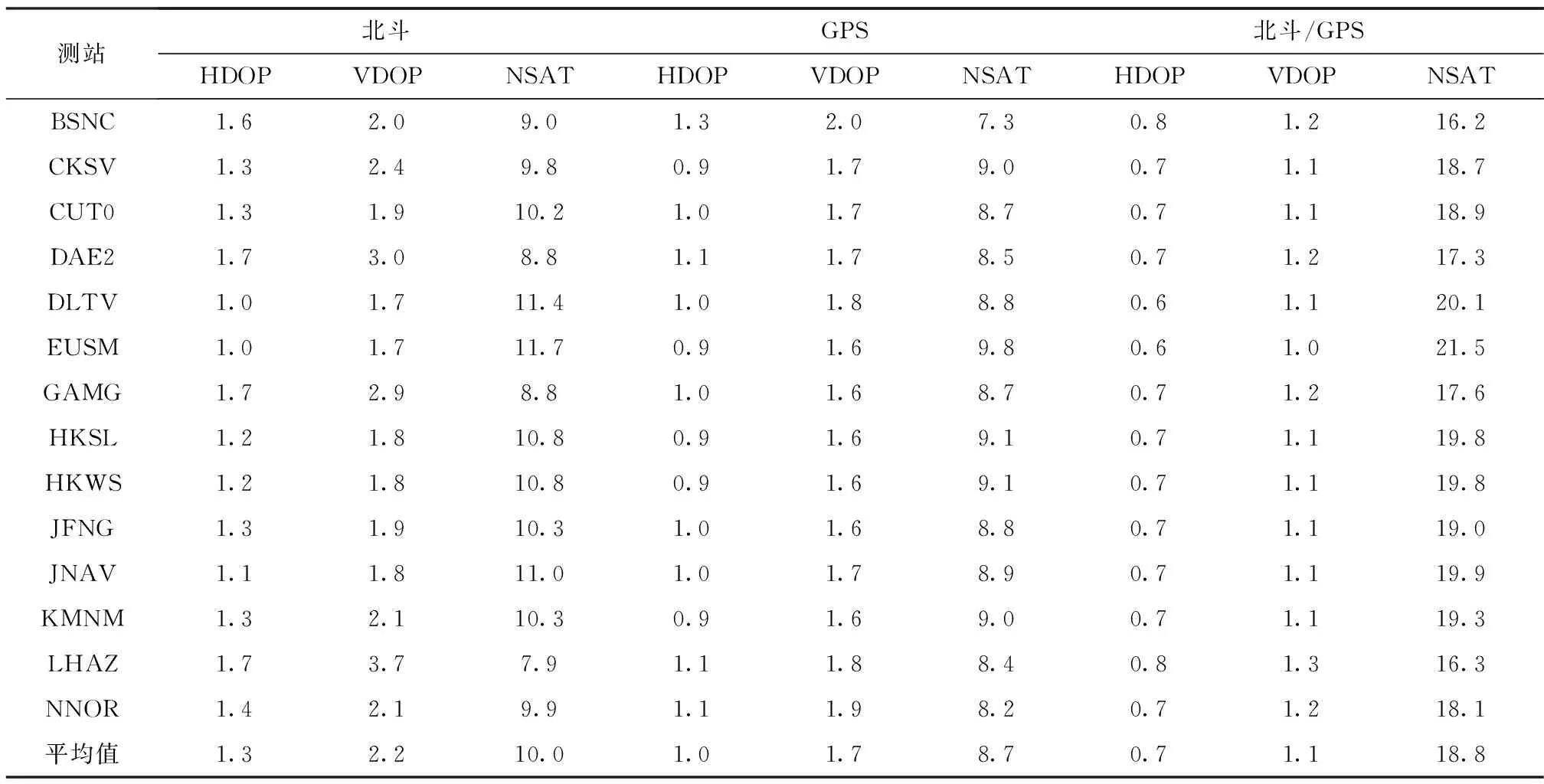
表3 试验期间(3d)测站平均DOP值和可见卫星数
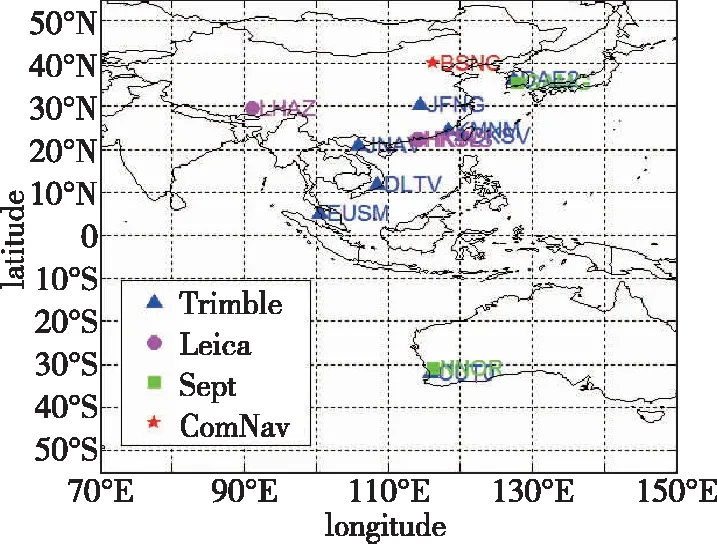
图1 静态数据试验测站空间分布情况Fig.1 Spatial distribution of the static test stations
从表3可知,测站BSNC、DAE2、GAMG和LHAZ的北斗平均可见卫星数或VDOP与其他测站相比差异明显,除了测站地理位置不一样导致的差异外,还存在如下原因:
1)ComNav M300接收机由于固件版本原因,不能收集北斗C13卫星数据,故BSNC测站没有C13观测数据;
2)由于北斗C05卫星在DAE2和GAMG测站的高度角小于10°,故DAE2和GAMG测站数据处理未包含C05观测数据;
3)LHAZ测站由于未知原因,北斗卫星仅有高度角大于20°卫星观测数据,而C04卫星高度角约为10°,因此LHAZ测站没有C04观测数据。
此外,尽管亚太地区北斗平均可见卫星数达到10颗,大于GPS的8.7颗,但北斗平均HDOP和VDOP值分别为1.3和2.2,反而大于GPS的1.0和1.7,这主要由于北斗特殊的星座构成所致,试验期间为5颗地球静止轨道(Geosynchronous Orbit,GEO)卫星、6颗倾斜地球同步轨道(Inclined Geosynchronous Orbit,IGSO)卫星和3颗中圆地球轨道(Medium Earth Orbit,MEO)卫星。
从表4可知,北斗B1/B2双频伪距单点定位平均水平定位精度为2.15m,高程定位精度为3.21m,三维定位精度为3.88m;GPS L1/L2双频伪距单点定位平均水平定位精度为1.45m,高程定位精度为2.57m,三维定位精度为2.96m;北斗/GPS双频伪距单点定位平均水平定位精度为1.17m,高程定位精度为1.83m,三维定位精度为2.19m。北斗二号双频伪距单点定位精度差于GPS的原因如下:1)北斗空间星座几何构型弱于GPS(见表3);2)北斗空间信号质量与GPS相比仍存在一定差距[13]。此外,通过分析E、N和U方向定位误差的偏差、标准偏差(Standard Deviation,STD)和均方根(Root Mean Square,RMS)(见表5)可知,北斗双频伪距单点定位在E、N、U方向均存在明显偏差,尤其是E方向偏差达到1.34m,而GPS定位E和N方向的偏差在厘米级,高程方向也仅为0.3m。而从内符合精度(STD)来看,北斗与GPS并无显著差异。由此可见,北斗双频伪距单点定位精度差于GPS的主要原因应该是北斗伪距单点定位结果存在的系统性偏差,由于北斗坐标系与GPS坐标系统差异在厘米级,因此原因可能与文献[14]分析的北斗广播星历偏差有关。
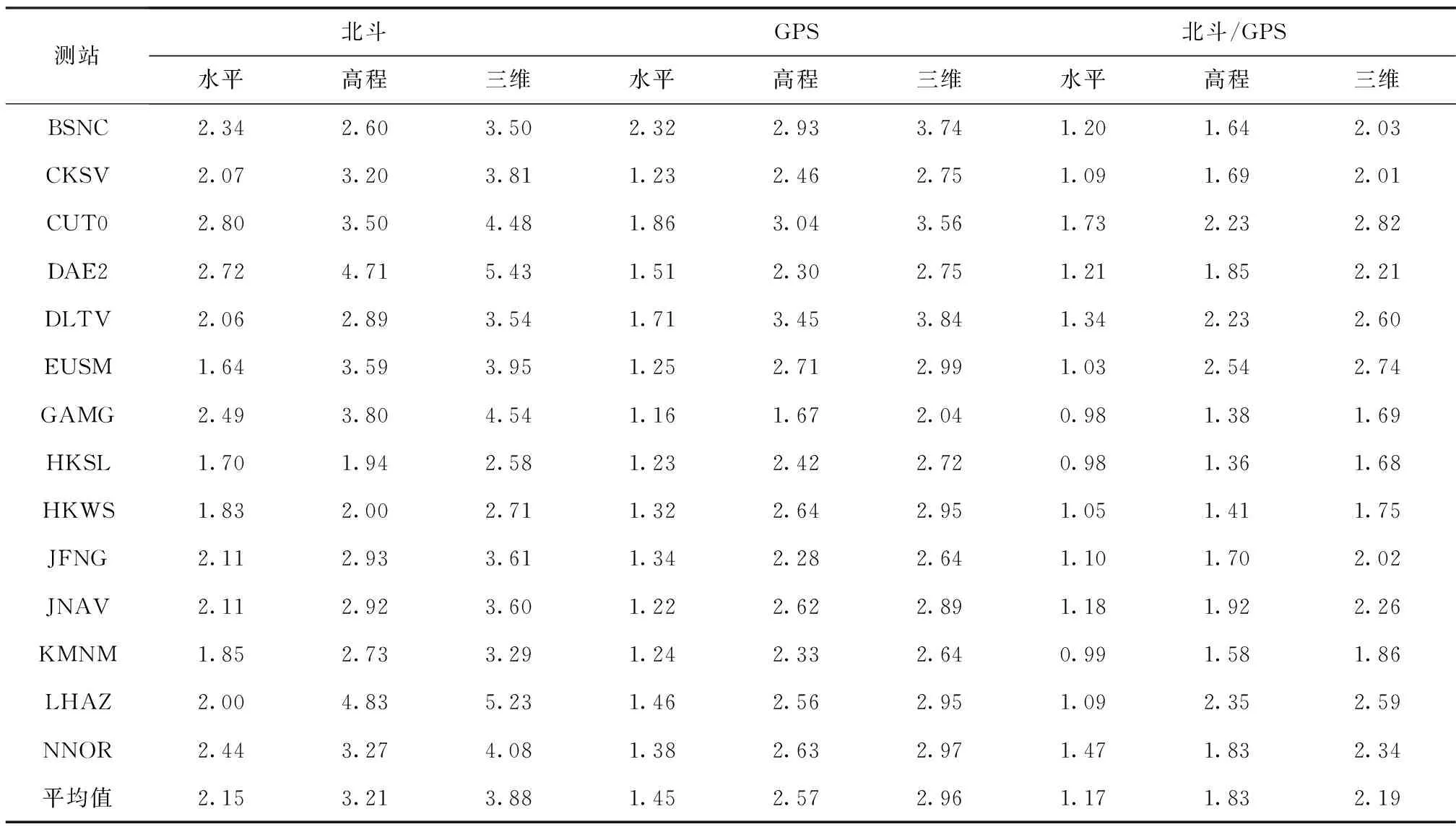
表4 双频伪距单点定位误差统计结果(RMS)

表5 14个测站双频伪距单点定位偏差、STD和RMS平均值
从表6可知,北斗双频载波单点定位平均水平定位精度为1.33m,高程定位精度为1.81m,三维定位精度为2.26m,相对北斗双频伪距单点定位结果改善百分比分别为38.1%、43.6%和41.8%;GPS双频载波单点定位平均水平定位精度为0.6m,高程定位精度为0.85m,三维定位精度为1.04m,相对其双频伪距单点定位结果改善百分比分别为58.6%、66.9%和64.9%;北斗/GPS双频载波单点定位平均水平定位精度为0.56m,高程定位精度为0.72m,三维定位精度为0.92m,相对其双频伪距定位结果改善百分比分别为52.1%、60.7%和58.0%。
表7中给出了14个测站双频载波单点定位偏差、STD和RMS平均值统计结果。虽然与双频伪距单点相比,北斗双频载波单点定位偏差有所减少,尤其是E方向,但仍然明显大于GPS结果。从内符合(STD)精度来看,北斗双频载波单点定位也差于GPS。除了星座几何构型和空间信号质量等原因外,北斗GEO和IGSO卫星相对于用户的空间位置变化缓慢,不利于模糊度偏差快速收敛,也是北斗载波相位定位差于GPS的一个重要原因。图2所示为JENG测站伪距单点定位和载波相位单点定位的定位误差序列图。
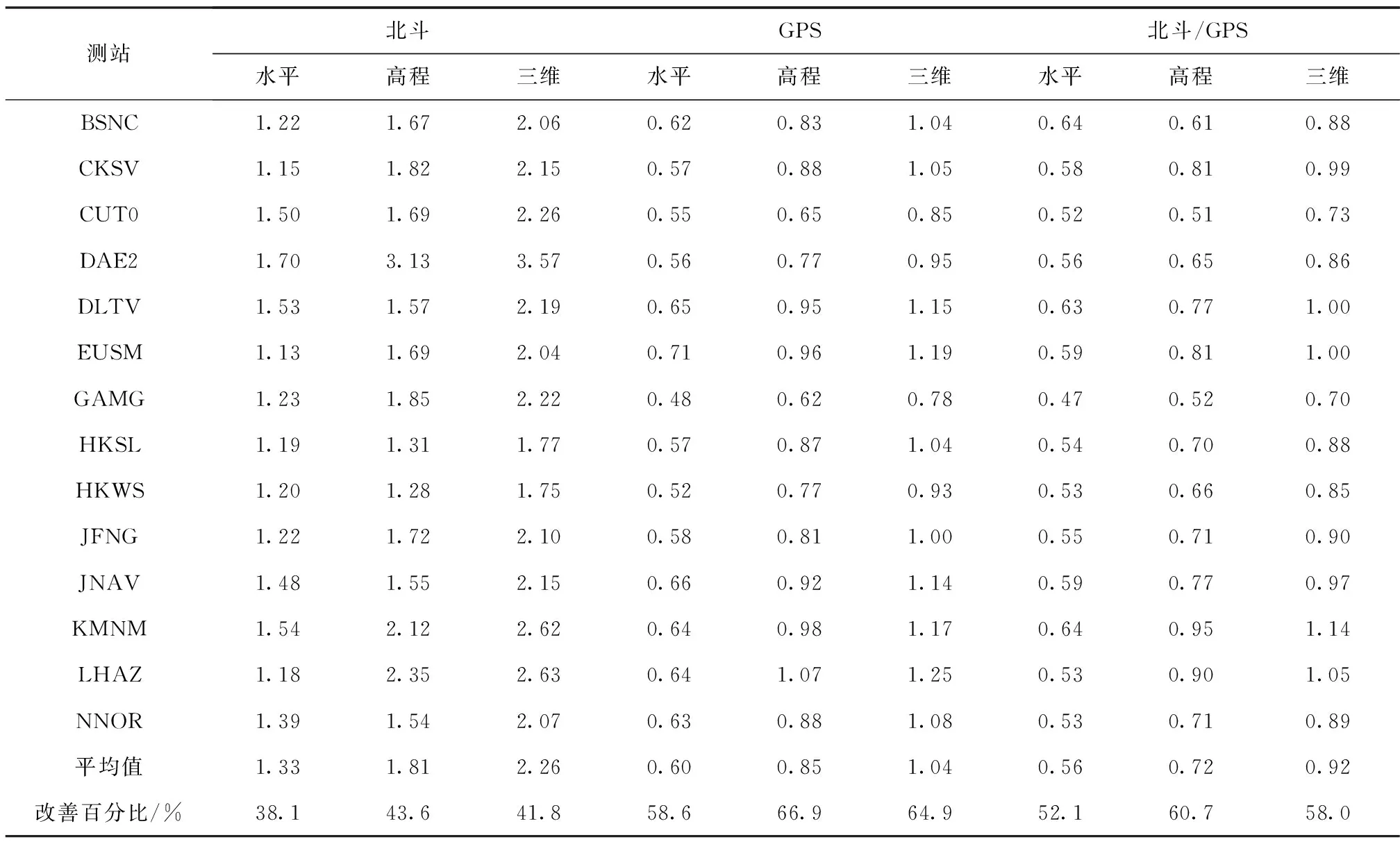
表6 双频载波单点定位误差统计结果(RMS)

表7 14个测站双频载波单点定位偏差、STD和RMS平均值
(a)伪距单点定位
2.2 船载动态数据试验
船载动态试验数据采集于2017年4月15日9时30分—16日8时35分,在我国南海海域使用上海司南导航公司M300型接收机,以1s采样间隔采集了约23h的船载动态数据,船载动态试验运动轨迹如图3所示。
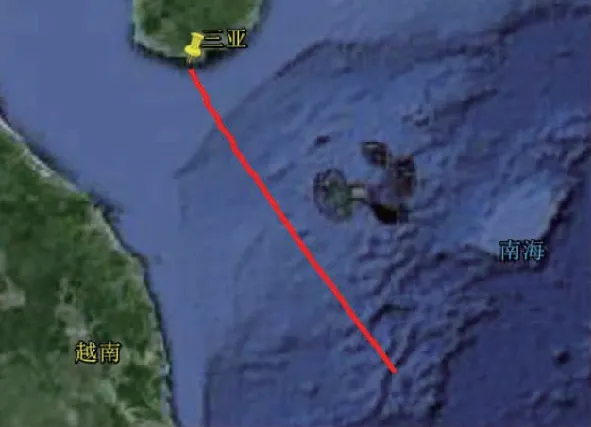
图3 船载动态试验轨迹图Fig.3 Shipborne kinematic test track
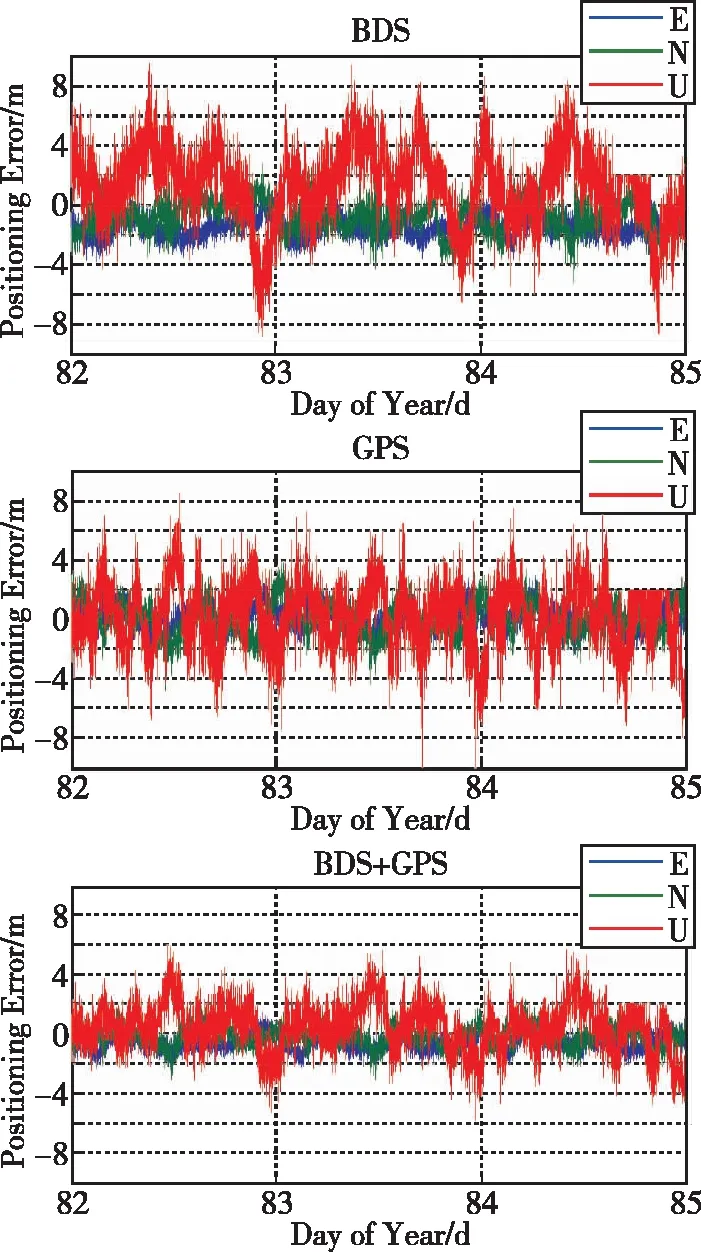
试验以合众思壮公司的星基差分实时PPP服务“中国精度”接收机的实时PPP固定解为参考基准(精度约0.1m),2台接收机通过功分器连接到一个天线。由于试验船的航速仅为15节且2台接收机的接收机钟差均小于1ms,因此可忽略2台接收机时标差异带来的坐标比对误差。北斗、GPS和北斗/GPS组合伪距单点定位和载波相位单点定位误差序列如图4所示,其中15日13时—20时期间,由于参考基准接收机数据输出线缆松动,未能记录数据,故无法给出该时段内定位误差序列,动态试验定位误差的统计结果如表8所示。

(a)伪距单点定位

表8 船载动态试验定位误差统计结果(RMS)
从图4可以看出,载波相位单点定位对于抑制伪距单点定位中的高频和低频误差均有显著效果,这主要得益于载波相位观测量更高的测量噪声和更小的多径误差影响,从而可以显著改善单点定位精度。从表8可知,船载动态试验情况下,载波相位单点相对伪距单点定位改善显著。北斗单系统情形下,水平、高程和三维改善百分比分别为45.3%、54.5%和52.7%;GPS单系统情形下,改善百分比分别为73.8%、81.4%和79.3%;北斗/GPS组合情形下,改善百分比分别为61.5%、75.2%和71.8%。
综合表4、表6和表8的静态与船载动态试验结果可知,北斗载波相位单点定位水平精度优于1.5m,三维定位精度优于3m;GPS和北斗/GPS组合定位水平精度优于0.7m,三维定位精度优于1.2m。此外,不管是伪距单点定位还是载波相位单点定位,北斗/GPS组合定位的精度均优于GPS或北斗单系统,但北斗/GPS组合载波相位单点定位精度相对于GPS单系统改善有限。
3 结论
基于导航卫星实时播发的广播星历和钟差信息以及双频伪距、载波相位观测量,通过简化的PPP函数模型和优化的随机模型构建了一种双频载波相位单点定位方法。多站多天静态数据和船载动态数据试验显示:该方法可实现北斗单系统水平定位精度优于1.5m,位置定位精度优于3m;GPS单系统和北斗/GPS双系统组合水平定位精度优于0.7m,位置定位精度优于1.2m。由于该方法不需要接收精密差分改正信息、也不需要增加额外硬件设备,只需更新现有GNSS双频测量型接收机软件,即可实现全球区域实时米级绝对定位,因此可广泛应用于海洋工程领域,具有较好的经济效益和应用前景。需要说明的是,该方法在可获取卫星精密轨道和钟差的情况下仍然适用,因此也可以利用北斗三号和Galileo系统播发的精密差分改正信息进一步提高定位精度。
