脉冲式事件触发控制的时变多个体系统一致性
2021-09-18过榴晓沈莞蔷
柴 洁,过榴晓,沈莞蔷,陈 晶
(江南大学理学院,江苏无锡 214122)
(*通信作者电子邮箱guoliuxiao@jiangnan.edu.cn)
0 引言
多个体系统作为一个非常活跃的研究领域,可以广泛应用于众多领域,如一致性、编队控制和同步[1-3]等,一致性问题作为多个体系统控制的基本问题之一,俨然受到众多学者的关注[4-6]。
考虑到多个体系统在复杂场景下机动目标跟踪或防碰撞的实际任务,满足任务要求和适应环境变化的编队需要是时变的。多个体系统的时变特性主要体现在时变动力学节点和时变的拓扑连接两个方面。相较于定常系统,时变系统的研究更具挑战性和难度。过去的几年里,研究人员在时变系统协同控制的稳定性方面做了大量的工作[7-9]。例如,文献[7]中采用矩阵无穷乘积方法研究具有切换系统的时变连续线性多智能体同步问题。文献[8]中为解决线性时变系统有限时间稳定性问题,提出一种求解有限时间稳定性问题的数值方法。文献[9]中研究了线性时变系统的渐进稳定性、指数稳定性和一致指数稳定性的问题。文献[10]中分析了非线性时变时滞系统的稳定性,同时将分析结果应用于具有时变系数的时变时滞线性系统的稳定性问题中。文献[11-12]中则假设邻接矩阵中每个元素在一个周期内的平均值大于一个预定义的正常数的条件,实现时变的多个体系统的一致性。显然,这个条件某种程度上非常保守。当考虑更复杂的动力学行为时,需要更多的约束条件来确保系统同步。本文研究时变多个体系统,包括时变节点的动态特性和系统拓扑结构的一致性。
为减少多个体系统信息传输的成本、降低个体系统的通信负载,研究人员提出了很多新的控制方法。文献[13]中设计了事件触发策略和自触发策略的两种算法来实现时变拓扑下的多个体系统的一致性;文献[14]中则采用基于事件触发控制方法,解决了固定和切换拓扑的领导跟随多个体一致性问题;文献[15]中针对资源受限的时变拓扑结构的多个体系统的编队控制问题,设计多个体系统的编队控制协议和分布式事件触发机制,讨论了系统的稳定性问题;文献[16]中针对具有时变通信延迟的多个体系统,给出事件触发条件并设计一致协议,解决系统的一致性问题。另一方面,脉冲控制作为一种离散的控制方法,具有降低通信和计算成本、操作简单等优点。文献[17]中提出了一个新的脉冲时滞不等式,给出了具有无界时变时滞的脉冲系统和时不变系统稳定的一些充分条件;文献[18-19]中结合事件触发的算法和脉冲控制研究了系统的一致性。进一步地,文献[20]中利用分布式事件触发脉冲控制方法研究了多个体系统的领导跟随一致性问题,对比仿真得到,事件触发脉冲控制比现有的许多基于事件的控制方法更加有效和简单;文献[21]中基于事件触发脉冲控制协议将多个体系统一致性结果推广到系统网络二分群一致性,而本文侧重将线性系统拓展到时变线性系统和时变拓扑连接情形,基于脉冲式事件触发控制协议讨论多个体传统一致性问题。
综上,针对时变拓扑连接环境下的时变多个体系统的一致性问题,本文提出了基于事件触发的脉冲控制协议。本文主要工作如下:1)使用脉冲控制和基于事件触发控制方法,集两者优点,设计了基于事件触发的脉冲控制协议,解决时变线性多个体系统的一致性问题,有效节约了系统信号传输和协议控制成本,控制方法也更加简单可操作;2)理论推导了时变拓扑下的时变多个体系统一致的控制参数充分条件,且证明事件触发脉冲时刻不存在芝诺现象。
1 预备知识及问题描述
1.1 代数图论
设含有N个节点的有向图G=(V,E,A),顶点集表示为V={v1,v2,…,vN},边集表示为E⊆V×V。点i的邻居集Ni={vj∈V|(vj,vi)∈E}。定义一个带有权重的邻接矩阵A=[aij]N×N,图G中存在一条有向边eij=(vi,vj)∈E,那么aij>0;否则,aij=0,定义aii=0。L=[lij]N×N为图G的拉普拉斯矩阵,且lij=-aij,j≠i;lij=,j=i。当系统拓扑是时变的,分别用G(t)和L(t)表示其时变的连接拓扑和拉普拉斯矩阵。本文有关符号表示如下:Rn表示n阶实向量,Rn×n表示n×n阶实数矩阵。对于向量x∈Rn、xT和‖x‖分别为其转置和常用的欧几里得范数。In是维数为n的单位矩阵,1N(0N)表示所有元素为1 或0 的N维列向量。Ν 为自然数集。符号diag{x1,x2,…,xn}表示对角元素为xi的对角矩阵。符号A⊗B表示矩阵A和B的Kronecker 积。λmax(P)和λmin(P)分别表示对称矩阵P的最大和最小特征值。
1.2 模型描述
考虑一个含有N个个体的线性时变多个体系统,每个个体的时变动态方程表示为:

其中:A(t) ∈Rn×n,B(t) ∈Rn×n表示连续的矩阵函数;xi∈Rn是个体i的位置向量;ui(t)为第i个个体的控制输入。基于事件触发脉冲控制协议设计如下:
系统(1)结合事件触发脉冲控制协议(2)也可表示为:
假设1 本文中所有的时变矩阵范数有界,即对任意时间t,存在正常数a、b,使得下式成立:

假设2 矩阵A、B是可稳的,有正数c,存在一个解P>0使得下列里卡提不等式[22]成立:

下面给出证明需要的几个重要引理。
引理1图G包含有向生成树,当且仅当G的拉普拉斯矩阵有唯一的零特征值,其他所有特征值都有正实部[23]。
引理2如果图G是强连通的,则G的拉普拉斯矩阵L不可约,且L1N=0 成立,存在一个对应于零特征值的左特征向量ξ=(ξ1,ξ2,…,ξn)T,使得ξTL=0且=1[24]。
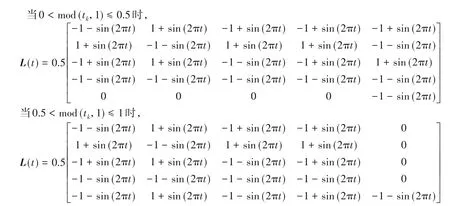
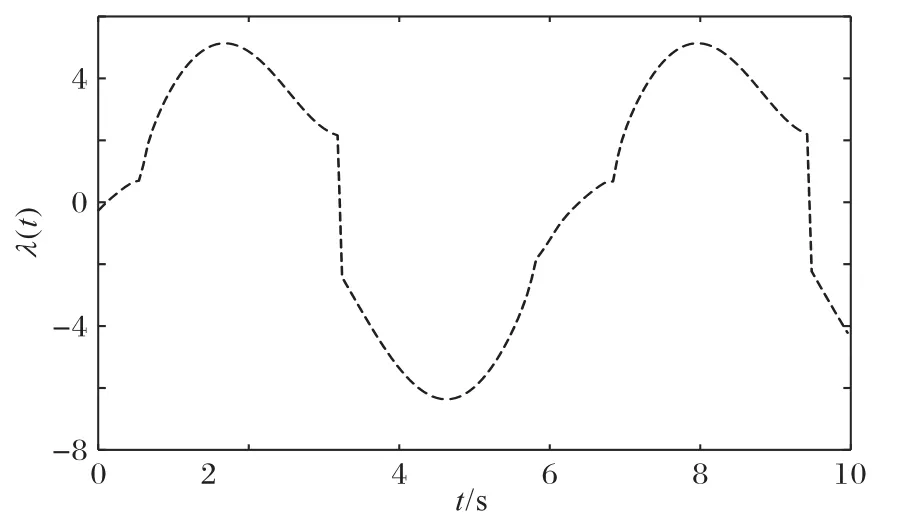
引理3令w(t)在[t0,∞)是非负的连续函数,w(t) 引理4函数g(t)在[t0,∞)上是一个一致指数稳定函数,若给定正常数d1、d2,存在时间序列和常数T>0,对∀t≥t0使得式(5)~(6)成立[9]。 定 义1 对于任意初始条件xi(0) ∈Rn,i∈I={1,2,…,N},若各个体的状态满足条件:则多个体系统(1)实现一致性。 定义2设时变连接拓扑图G(tk),与其对应的拉普拉斯矩阵L(tk),若满足以下条件[26]: 序列{tk}按时间顺序排列,通常来说,不是所有的个体在tk时都有脉冲输入,在tk时刻,至多有不超过N个个体被触发。即有i(1 ≤i≤N)个个体在tk刻触发,则可设触发矩阵σ(k)=,也 就 是qN=[q,q,…,q]T,(q=0,1),‖σ(k)‖1=i。 基于事件触发控制的脉冲策略,多个体系统网络(3)的矩阵形式为:下一次事件触发将不会触发,直到触发函数式(4)变为0,其中e(tk)=0,结合式(12)可得: 定理2时变多个体系统(1),设图G(tk)平均一致连通,基于事件触发脉冲控制器(2)的触发时刻由式(4)决定,若存在连续且有界的函数λ(t),λ(t)是一致指数稳定函数,一个可微矩阵函数P:[0,∞) →Sn+,P(t)=IN-1⊗p(t),存在常数p1和p2,0 其中:k=1,2,…。则系统(1)实现渐进一致性。 证明 为证明系统稳定,对任意t∈(tk,tk+1],构造李雅普诺夫函数得: 其中:μ(Tj(t0,t))为Tj(t0,t)的勒贝格测度集。φ1(t)有界结论当t→∞时,ς1(t) →0,定理1即得证。证毕。 在式(7)中,考虑非时变系统情形,即A(t)=A,L(t)=L,B(t)为单位矩阵I。式(7)中模型改写为不是时变的事件触发脉冲控制多个体系统模型: 可以直接得出下述类似文献[20]中的推论。 推论1 考虑多个体系统(22)的连接拓扑图连通,在事件触发的脉冲控制协议下,若存在正定矩阵P,常数α>0,k∈Ν+满足: 其中:φ(t0,t)是R+上的连续函数。则当=-∞成立,系统(22)实现全局渐近收敛。存在常数c>0,t≥t0,使φ(t0,t) ≤-c(t-t0),则系统(22)实现指数收敛。其中脉冲强度的范围满足: 根据上述的讨论,事件触发函数式(4)替换成: 上述触发函数的优点是避免了智能体之间的持续通信。在该触发条件下,下一触发时刻tk+1可以通过该智能体在tk上的邻点信息预测。 定理3非时变的多个体系统(22),假设连接矩阵拓扑图连通,基于事件触发的脉冲控制器(2)的脉冲触发时刻由式(25)决定,则系统(22)可实现指数一致性收敛,且不存在芝诺行为。 推论2 连续两个触发事件之间的时间间隔会随着触发函数(25)中的参数β、η增加而增加。 证明 由触发函数(25),若误差ei(t)超过阈值上界,可得 假设不成立。即得参数β、η增加,连续两个事件之间的时间间隔也将增大。证毕。 例1 考虑多轮式移动机器人的位置跟踪问题[27],每个个体的线性时变模型表达式如下: 其中:i=1,2,…,5。控制输入按式(2)定义计算,初始状态在[-60,60]×[-60,60]×[-60,60]×[-60,60]×[-60,60]⊂R5中随机选取,令脉冲强度γ=0.7,β=0.01、r=η=0.01,控制参数验证满足定理3 条件,A=,其中:a、b、e和d为时变标量;个体的三个状态分量分别表示位置、速度和执行器的状态;a表示驱动器的速度;b和e表示增益。如果d>0,执行器受速度影响,系统内部形成反馈回路。参数{a,b,d,e}为{0.8× sin(t),1+0.1× cos(t),0,0.8× cos(t)} 。 其中K=1。则图G(tk)平均一致连通的,可得 函数λ(t)的演化如图1所示,其中λ(t)不总是负值。 图1 λ(t)的演化图Fig.1 Evolution of λ(t) 验证满足定理2条件,式(26)中状态分量轨迹图如图2所示,图3 反映了系统的整体一致误差e(t)=很快趋于0,基于事件触发脉冲控制协议最终实现状态一致。 图2 式(26)中时变拓扑下的多轮式移动机器人的状态xi(t)(i=1,2,3)轨迹Fig.2 Trajectories of state xi(t)(i=1,2,3)of multi-wheeled mobile robots under time-varying topology in formula(26) 图3 式(26)中个体的误差演化Fig.3 Error evolution of agent in formula(26) 图4 展示了系统的脉冲事件触发事件序列,随着时间变化,始终有触发时间间隔且没有芝诺行为。 图4 系统在10 s内的触发时间序列Fig.4 System triggered time sequence in 10 s 数值实验结果表明,离散形式的分布式事件触发脉冲控制,对于时变多个体系统,同样可以有效降低系统的通信成本。从符合定理条件仿真实例误差图可见,可以很快达到一致状态。 本文研究了具有时变特性和基于事件触发脉冲控制的多个体系统的一致性问题,系统的每个节点是动态线性时变的,系统拓扑结构也是时变的。使用离散形式的控制协议,可充分降低系统的通信成本。在系统拓扑平均一致连通的假设下,理论证明了时变多个体系统一致性转化为多个线性时变事件触发脉冲控制系统的同时稳定性问题,给出了事件触发脉冲控制协议下具有时变特性的多个体系统一致性存在的充分条件,且不存在芝诺行为,数值仿真验证所给理论结果的有效性。下一步将研究基于间歇控制的时变多个体系统的领导跟随一致性等问题。


2 一致性协议分析








3 数值仿真





4 结语
