煤矿巡检机器人关键技术及发展研究
2021-09-17李红骄乔凯
李红骄 乔凯


摘 要:为了研究中国煤矿巡检机器人关键技术及发展研究,以CNKI期刊数据库1991—2021年共386篇相关文献为样本,利用CiteSpace和VOSviewer两个知识图谱软件绘制可视化图谱,对煤矿巡检机器人关键技术及发展研究领域文献的发文年份、作者、学术来源分析、关键词分析、关键字突变5个方面进行文献计量分析。矿用机器人能够完成煤炭、煤机设备和人员的运输任务,对煤矿智能运输系统的建设和煤矿无人值守的实现具有重要的现实意义。本文基于VosViewer和CiteSpace软件对巡检机器人的介绍和知识图谱分析进行分析,了解矿用巡检机器人应用的实际情况。
关键词:巡检机器人 学科知识图谱 热点与趋势 VOSviewer CiteSpace 文献计量
中图分类号:TD40 文献标识码:A 文章编号:1674-098X(2021)05(c)-0097-09
Research on Key Technology and Development of Coal Mine Inspection Robot
—— Knowledge Graph Analysis Based on VosViewer and CiteSpace
Li Hongjiao1 Qiao Kai 2
(1.Shaanxi Shaanmei Shanbei Mining Co., Ltd., Yulin, Shaanxi Province, 719300 China;2.School of Communication and Information Engineering, Xi'an University of Science and Technology, Xi'an,
Shaanxi Province, 710054 China)
Abstract: In order to study the key technology and development research of China's coal mine inspection robot, taking 386 relevant literatures in CNK I journal database from 1991 to 2021 as samples, the visual atlas is drawn by using CiteSpace and VOSviewer knowledge atlas software, and the year of publication, author, academic source analysis, keyword analysis Bibliometric analysis was carried out from five aspects of keyword mutation. Mining robot can complete the transportation tasks of coal, coal machinery equipment and personnel, which has important practical significance for the construction of coal mine intelligent transportation system and the realization of unattended coal mine. Based on VOSviewer and CiteSpace software, this paper analyzes the introduction and knowledge map analysis of patrol robot, so as to understand the actual application of mine patrol robot.
Key Words: Inspection robot; Subject knowledge graph; Hotspots and trends; VOSviewer; CiteSpace; Bibliometrics
煤礦开采过程危险,采矿环境条件复杂。因此,随着我国现代科学和信息技术的不断发展和进步,机器人将逐渐并完全取代原来的人类日常劳动。在当今我国煤矿工业生活的科学研究和应用中,人工智能也已经在实践中快速进步[1]。《中国传统制造2025》是煤矿行业发展智能化战略行动规划,其中明确提出,要加快实施关键生产工序管理智能化、关键生产岗位管理机器人智能化替代、关键生产过程管理设备过程控制智能化和系统控制管理能力,以及推动我国社会主义建设科学研究工作重点4个领域的智能智化工厂,未来中国煤矿将逐渐实现企业公司内部生产管理设备的智能网络化和企业生产现场无人化,这为我国推动智能时代下中国煤矿产业的发展和促进大学生就业提供了一种新的借鉴性和理论指导[2]。我国《能源技术革命与创新行动计划》文件中明确提出,要不断提高我国煤炭技术开发的生产效率和工程智能化管理水平,研发高效无人建设钻井、快速无人掘进、智能化建井工作面等关键技术,在全国各地重点煤炭采矿区基本上可以完成无人建井工作[3]。
在现阶段,煤矿巡检企业智能巡测发展应用机器人的研发技术人员及工作团队应把主要重点集中在无轨列车导航、小型化、工具化与大学生实际使用的新技术4个方面,并要切实努力构建成一起基于煤矿巡检智能微型巡检发展机器人的煤矿巡检信息资源管理的一个专用服务网络平台,不仅使目前我国使用煤矿智能巡检发展机器人的相关实用性技术能够得到大幅提升,并且还能够保证其实际应用的检测效果及分析精度有效地达到预期[4]。
知识资源图谱技术是近几年为人所知的一个技术概念,在公共图书馆和智能管理领域,称为一种知识与资源可视的文化或者是知识管理领域中的地图知识图,是用于展示各种知识及其发展历史过程和资源结构的一系列不同类型图形,用各种可视化绘图技术方式来准确描述各种知识及其资源结构及其信息载体,挖掘、分析、构建、绘制和整理展示各种知识及其相互关系[5]。知识资源图谱对于大量的文献处理和可视化分析,对某一学科的文献、研究人员、研究机构、发文量、关键热词等具有独特功能。
为了更加深入了解我国智能矿井探究现状和研究成果,更加清晰地展现此方面文献的研究方向与趋势,以中国知网(CNKI)作为数据库,选取矿用巡检机器人移动平台、自主导航与定位、智能控制、自主充电、后台管理及在线故障诊断为主题的相关文献为研究对象。利用可视化工具CiteSpace和VOSviewer绘制知识图谱,展开研究,以期为国内的学者对此方面的研究提供一些参考,帮助他们快速把握热点,掌握脉络。
1 数据来源与研究方法
1.1 数据来源
(1)数据来源:CNKI数据库。
(2)检索格式 :主题=“矿用巡检机器人”,“智能巡检”,“带式输送机”,“控制系统”。
(3)时间跨度:1999—2021年。
(4)文献语种:中文。
(5)文献类型:期刊,会议,报纸,博硕士。
(6)精炼结果:386篇中文文献。
(7)检索时间:2021年4月10日。
1.2 研究方法
本文采用CiteSpce和Vosviewer两种可视化分析软件。
CiteSpace是一款着眼于学生分析社会科学研究文献中蕴含的潜在知识,并在社会科学应用计量动力学,数据和电子信息技术进行数据可视性转化的大背景下逐渐发展成为行业发展趋势结合应用起来的一款多元、分时、动态的企业引文数据可视化管理系统,它是分析类型企业管理软件,由美国德雷塞尔大学计算机与中国情报管理学院的教授陈超美共同使用了C语言与Java语言两种语言合作开发的[6]。本文采用的是CiteSpace 5.6.R1.12.3版本。
VOSviewer是荷兰莱顿大学科技研究中心的van Eck和Waltman于2009年开发的一款用于构建和可视化文献计量网络的软件。本文采用的是VOSviewer_1.6.15版本。
2 研究的基本情况
2.1 发文量分析
基于CNKI数据库的检索结果,通过整理数据,利用Excel画出每年的发文量图。
从图1上看,该图的横坐标表示1999—2021年的发表年度趋势,纵坐标表示发文量,3个线条分别表示所选文献、参考文献、引证文献,整个图描绘随时间的增加,在CNKI数据库中有关煤矿巡检机器人的相关文献发表的数量,其中在1999年就有发表相关的论文,在1999—2013年期间,发表的相关文献并不是很多,处在相关领域方面的真空期,在2013—2020年有大幅度的提升,可看出在此时间段,国家以及各个企业研究院等大力发展巡检机器人,是相关领域的繁荣期,整个年内呈现出“机械化换人,自动化减人,智能化无人”的趋势特征,预计未来有关矿用巡检机器人方面的研究发文量将会持续增长[7]。
2.2 作者分析
利用CiteSpace和VOSviewer分别对作者进行分析,筛选出发文量更多的作者。
图2为VOSviewer的分析结果,图中呈现的是较多且与其他作者有联系的作者。灰度等级可以代表作者 不同的发文时间,连线的地方表示作者间有一定的关系。这里的时间为作者首次发文时间。
图3为CiteSpace的分析结果。其中,结点大小表示作者的多少,连线的粗细表示作者之间合作密度,灰度等级表示的是时间不同。
通过分析研究结果:筛选发文量在前19名的作者整理如图4。
结合作者发文量的知识图谱和统计数据可以看出,一些作者对矿用巡检机器人方面是有过深入的研究的,尤其是近两年来,发展更迅速,其中发表相关文献最多的是吴功平教授,吴功平教授来自武汉大学,其对自动化技术,电力工业和计算机软件及计算机应用,至今发表过141篇论文或期刊,其最高被引荐的论文或期刊均与巡检或者机器人相关,在探究实用性机器人方面有很大的成就,与曹琪、胡鹏等人多次发表相关文献,可能有一定的合作关系。商德勇教授来自中国矿业大学,发表巡检机器人方面的相关文献多至24篇,他主要关注的领域是巡检机器人、薄煤层、动力学分析等,其中被引用热度最高的文章均和薄煤层上巡检机器人的运动有关,对于巡检机器人在煤矿方面的实用方面有重大意義。
2.3 学术来源分析
通过CiteSpace分析研究各个文献的发文期刊及其时间情况,如图5所示。
从图5可以清晰地看出矿用巡检机器人的发展情况,其中结点和线段表示期刊文献的数量及其相关性,每一个节点即为一个文献出处,节点大小代表文献出处出现频率,节点越大,文献在该出处出现频率越高。从2017—2020年间,文献的发表逐年增多,从制造业自动化到煤矿机械再到建材技术与应用和工矿自动化,可以看出文献的发表越来越细致化,专业性目的性也越来越强。
由表1的数据可知,从CiteSpace的发文量的总结上看,可以看出巡检机器人研发以及作用的必要性,在近些年一些名刊不断地被提及探究。综合来看,巡检机器人这个话题近年来正在趋势上,而且越来越火热,并且相关的文献之间的联系也越来越紧密,对于国家而言,正在逐渐做到全智能化。
图6显示的主要是一些相关学术文献的作者发表处和来源处,其中作者发表的文献数量增大,使其发表来源处中的字体更加粗大,由此从图6可以清晰地看出西安科技大学机械工程学院、武汉科技大学机器人与中国智能控制系统技术研究院、中国冶金大学自动化与质量检测职业技术学院教育部工程研究中心、中国矿业大学江苏省矿山机电装备高校重点实验室等几所高校、实验室或者有限公司,在矿用巡检机器人方面做出了巨大的贡献,在其相关领域方面,比如运动功能或者巡检能力方面,进行了深入的研究。
3 研究热点与前沿
3.1 关键字分析
3.1.1 CiteSpace聚类
本文以“矿用巡检机器人”“巡检机器人”分别为主题词从CNKI收集数据,并做数据整理。将样本统计结果数据导入CiteSpace进行转换处理,将时间切片的时间范围设置年份为1999—2020年间,时间切片为1年,Select the node type key word,选择前50为每个时间片和余弦的连接强度,连线强度选择Cosine,从而导出知识图谱。
图7中每一个节点即为一个关键词,节点大小代表关键词出现频率,节点越大,关键词出现频率越高。该知识图谱共生成323个结点,连线为593条,亲密度为0.0114。图谱中节点表示关键词,节点大小表示关键词出现频次,节点越大,关键词出现频次越高,节点之间连线反映合作关系,连线粗细反映合作关系强度,连线越粗,合作关系强度越大。关键词的热度用“#+关键词”标注了出来,列举出了关键词热度前21的名词,其中被提及最多的3个关键词是薄煤层、机器人和路径规划。
图8是在图7的基础上进行了NodeShape的circle变换,其中关键词circle的大小体现出了该关键词的热度,从图中那个可以清晰地看出关键词主要围绕巡检机器人、智能方面。对于机器人的运动能力和巡检功能依旧是深入研究的重点。
3.1.2 Vosview聚类
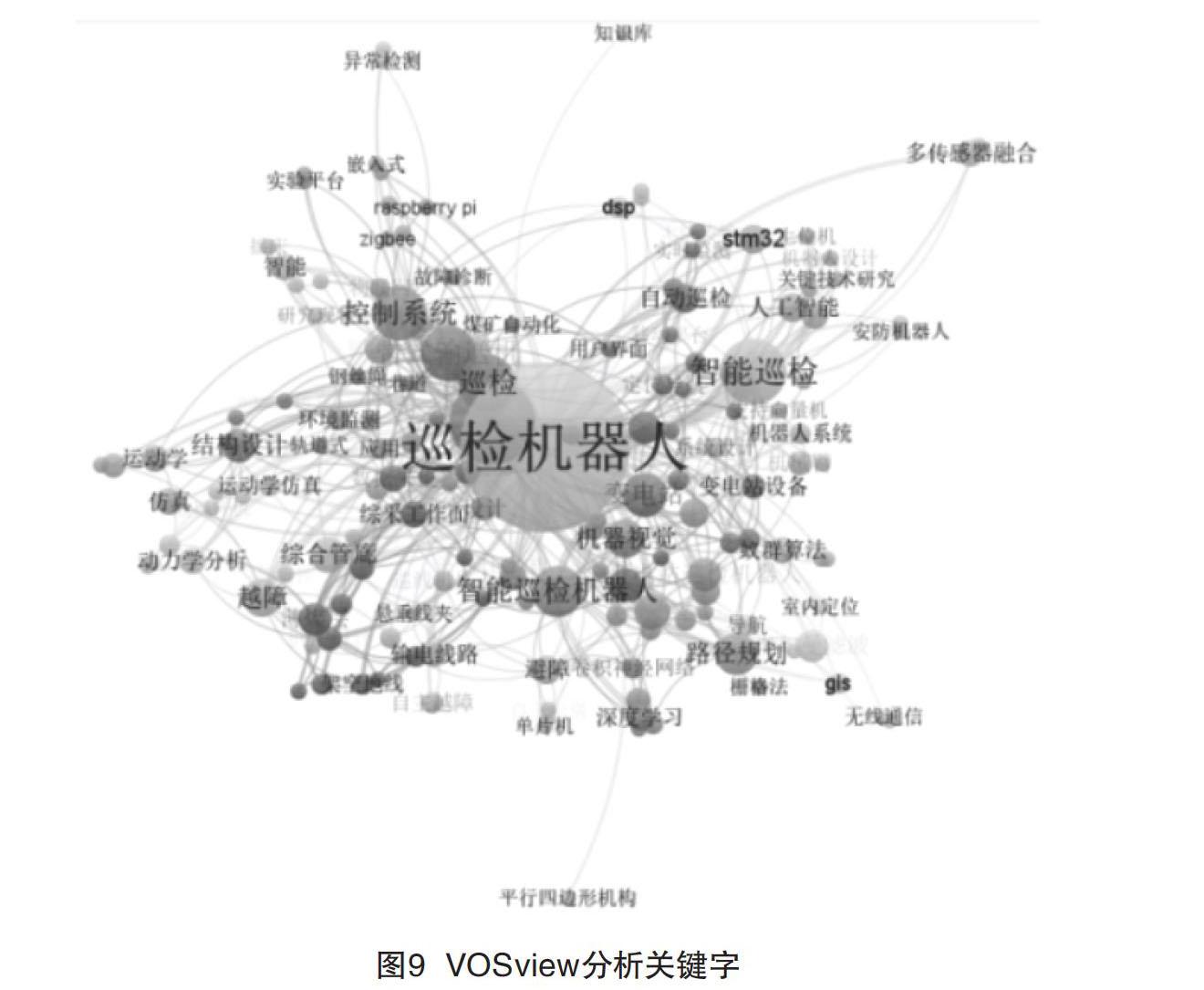
将CNKI期刊数据库中的数据,以End Note格式导出,文献转换成RIS格式,并利用End Note软件将文献导出,create一个新的项目并选择create a map based on bibiographic data,读取相关信息后,将type of analysis选择Co-occurrence,unite of analysis选择key words,Counting method选择Full counting,最少出现次数选1026个关键词中有164个关键词满足阈值要求。聚类结果如图9表示。
节点大小表示关键词出现次数,名列前茅的有:巡检机器人、机器人、智能巡检、带式输送机、控制系统、巡检、智能巡检机器人、变电站、越障、路径规划、故障检测、结构设计、薄煤层、视觉导航、煤矿、机器视觉、关键技术等。从图9可以直观地看到不同关键字之间的联系,不同的颜色表示不同的聚类,结合结果可知,聚合为11个类[8]。
综合CiteSpace和VOSviwer聚类结果分析 :“聚类算法”“柔性轨道”“有限元分析”“牵引力”[9]“混合驱动”“综采工作面”“蚁群算法”“巷道”“防爆结构”“运动学仿真”“越障”“智能巡检机器人”等是 “矿用巡检机器人”的研究热点[10]。
图10是用Vosview用Density Visualization窗口来分析关键字,其中避免个别字节太大影响效果,删掉“巡检机器人”后的结果,该图中每个关键字的明暗程度代表该关键字的总联系强度和出现次数。其详细数据如图11所示。
3.2 关键词突变
突现词研究可以得出该主题的研究趋势和热点研究方向,本文查找到得突现词如图12所示。
图12中,第一列表示关键词,第二列表示所有文献中的最早的年份,第三列表示强度,第四列和第五列的年份分别表示此关键词的起始年份和截止年份。
4 结论
“十三五”规划提出,通过技术创新加强企业职业病危害防治。企业进行面对问题越发严格的职业病防治规范,要同时投入更多学习费和更多的技术成本以便于确保公司全体职工的安全。“机器更换”,应用工业机器人已成为推动企业在快速发展提高生产经营效率、降低生产经营成本、提高企业产品综合技术含量、扩大提升企业核心竞争力三大方面。因此,大力发展巡检机器人已成潮流,为了更方便地去观察整体发展和走向,对相关文献进行了深入分析。
在CNKI上通过主题词检索出来的文献可能只是相关领域的一部分论述,也有很多相关的文献没有出现或者可能以其他的形式呈现,并不能完全代表现在矿用巡检机器人的发展,因此对国内“矿用机器人”的发展和研究现状的前沿预测有一定的局限性。本文筛选的文献多达386篇,在一定的程度上可以反映出大体的规律,故而运用科学知识图谱“CiteSpace”和“Vosview”等对矿用巡检机器人相关文献进行分析,综合上面分析结果得到以下结论。
从研究结果上看,大部分的企业或者研究院关于矿用巡检机器人的研究是有一定的联系的,并且不少都有合作,在多元化的社会中,还是比较适合学术成果的创新和发展。“聚类算法”“柔性轨道”“有限元分析”“牵引力”“混合驱动”“综采工作面”“蚁群算法”“巷道”“防爆结构”“运动学仿真”“越障”“智能巡检机器人”等是“矿用巡检机器人”的研究热点。
随着科学技术的不断创新和发展,将会推动智能化的发展,由机械代替人工,大大地提高生产力并且保护了人们的安全,随时间的推移,矿用巡检机器人也将走入无人化、机械化、智能化。
参考文献
[1] 林志龙.智能巡检机器人應用现状及问题探究[J].数码设计,CG WORLD,2018,7(5):20.
[2] 杨建栋.探析矿用巡检机器人在煤矿中的应用[J].数码设计,CG WORLD,2019,8(18):44.
[3] 孙英飞,罗爱华.我国工业机器人发展研究[J].科学技术与工程,2012,12(12):2912-2918,3031.
[4] 裴文良,张树生,李军伟.矿用巡检机器人设计及其应用[J].制造业自动化,2017(2):73-74.
[5] 陈悦,陈超美.Cite Space知识图谱的方法论功能[J].科学学研究,2015,33(2):242-253.
[6] 陈悦,刘泽渊.悄然兴起的科学知识图谱[J].科学学研究,2005,23(2):149.
[7] 梁家艳,李含伟,张顺萍.我国老年人再就业问题的研究热点与前沿——基于Citespace和Vosviewer的知识图谱分析[J].智能计算机与应用,2020,10(2):284-289.
[8] 肖鹿,李凯,王伟,等.露天矿山输煤廊道巡检机器人[J].露天采矿技术,2020(6):69-73.
[9] 刘建荣,伊玉祥,徐杜民,等.钢丝绳牵引式巡检机器人研究与应用[J].煤矿机械,2021,42(1):37-39.
[10]崔壮,李栋华,刘彦君,等.数据中心智能巡检机器人设计及关键技术研究[J].电气时代,2017,12(435): 132-135.
