基于图像全站仪的椭圆目标自动测量
2021-09-17汪晶
汪 晶
(中铁第四勘察设计院集团有限公司,湖北 武汉 430063)
在利用全站仪进行测量的过程中,要使用全站仪自动照准目标,就需要在目标位置布设专用的测量棱镜,全站仪通过发射红外线,再根据接收到的红外线强度来搜索、确定棱镜中心的方向[1-2]。而在实际应用过程中,很多位置无法布设棱镜,常常会在测点位置粘贴反射片靶标,由于受到反射片反射质量、天气环境因素以及反射片角度等因素的影响,因此全站仪使用自动目标照准功能时常常无法自动搜索到反射片靶标或者搜索到的照准误差很大,最终也需要通过人工进行照准。
该文基于智能型全站仪自动照准的原理[3],通过终端设备上的应用程序控制图像全站仪对测点靶标进行拍照获取影像,利用图像处理算法对靶标进行图像处理拟合中心位置,最后利用终端设备控制图像全站仪照准靶标中心并对其进行测量。
1 图像全站仪
徕卡图像全站仪[4-6]TS60是徕卡公司推出的第五代高精度智能型全站仪,它将精密机械技术、光电技术、计算机技术和影像技术等集成在一起,从单点测量模式跃进到多点和面测量模式。徕卡TS60图像全站仪配备了广角相机和望远镜相机,相机参数见表1。
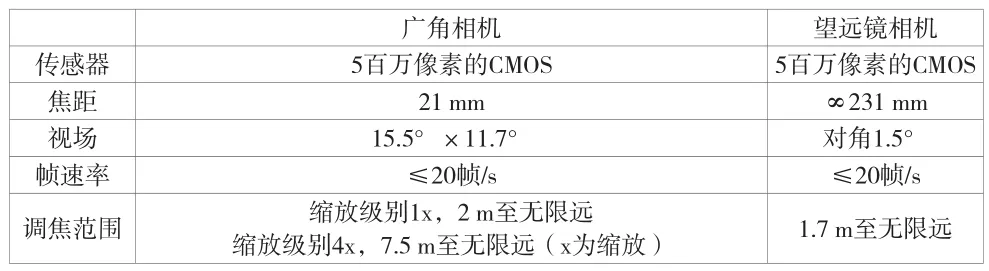
表1 徕卡TS60的相机参数
2 技术方案
该文技术方案流程如图1所示,首先,在测点位置布设专用的靶标,全站仪设站完成后与终端控制设备连接,通过终端设备上的应用程序控制全站仪对测点靶标进行拍照获取影像,从影像中利用机器学习算法概略定位靶标范围;其次,对靶标进行图像处理拟合中心位置;最后,利用应用程序控制全站仪照准靶标中心并对其进行测量。

图1 技术方案流程图
2.1 靶标布设
为了便于从影像中自动定位靶标中心,选用如图2所示的测量靶标,靶标内部是高反光材质的圆形区域,圆形区域外部为黑色的吸光材质,靶标中心的十字丝与圆形的圆心重合。圆从任意方向照准,在图像中均显示为椭圆(圆也可以看成是一种特殊的椭圆),图像中的椭圆中心即为圆心。

图2 测量靶标
根据现场实际需求,选取合适大小的靶标粘贴到目标位置。
2.2 全站仪设站与连接
按照常规测量方法对全站仪进行设站,例如在已知点上对中整平输入坐标及方位角或者通过多个已知点进行后方交会自由设站计算设站坐标。设站完成后,通过串口数据线、蓝牙或者Wi-Fi等连接方式将全站仪与终端设备(计算机、手机和平板电脑等)连接,启动终端设备上的全站仪控制程序。
2.3 全站仪拍照
通过终端上的控制程序将全站仪的测距轴概略指向靶标方向,保证靶标在全站仪望远镜相机视场内可见。控制程序利用与全站仪测距轴同轴的望远镜相机进行拍照,然后将拍摄的图像传输到终端设备。
2.4 靶标位置概略定位
在终端设备上,对包括靶标的影像进行处理,通过深度学习、模式匹配等图像处理技术对图像中的靶标进行识别[7-8],概略框选出靶标在图像中的位置和范围,每个范围框只包括1个靶标。
2.5 靶标中心拟合
在每个范围框内的靶标影像中,通过以下9步处理流程得到靶标在图像中的坐标位置:1) 灰度化。对初始拍摄的三波段彩色影像进行灰度化处理,将其转换为单波段的灰度图,方便后续处理。2) 灰度变换增强。由于天气因素、光照以及阴影等因素降低了靶标中间白色圆形与外部黑色背景框之间的对比度,因此通过分段线性变换,增加图像的对比度。3) 二值化。利用最大类间方差算法确定二值化灰度阈值,然后根据阈值利用二值化将图像转换为黑白图像。4)图像平滑。二值化后的图像可能存在噪声点,采用中值滤波或者高斯滤波等算法对图像进行平滑处理。5) 边缘检测。利用Canny算子或其他边缘检测算法提取图像对象的边界信息,得到边界影像图。6) 矢量化。为提高靶标圆形的拟合精度,根据横纵坐标将边界图像中的边界点像素转换为矢量点数据。7) 噪声剔除。剔除转换后的矢量点数据中一些显著的孤立点数据,减少对拟合结果的影响。8) RANSAC算法拟合。使用随机抽样一致性算法(Random Sample Consensus,RANSAC)和最小二乘算法相结合的方法对矢量点数据进行中心拟合。9) 圆心坐标输出。输出拟合的中心在图像中的坐标值。
2.6 靶标中心测量
根据拟合的靶标中心在图像上的坐标值、全站仪测距轴在图像上的坐标值(固定参数,根据全站仪二次开发接口获取)以及拍摄的图像大小对应全站仪望远镜相机的视场角参数(根据全站仪二次开发接口指令获取)可以计算出靶标中心相对测距轴的偏转角度,具体过程如下。
如图3所示,已知图像宽度为w,图像宽度对应的水平方向视场角大小为Ax,图像高度为h,图像高度对应的竖直方向视场角大小为Ay,全站仪测距轴在图像上的位置为(xo,yo),拟合得到的靶标在图像上的位置为(x′,y′)。因此,靶标中心点相对测距轴在图像上的位置点的偏移值为Δx=x′-xo和Δy=y′-yo,相应的角度偏移值分别为ΔAx=Δx·Ax/w和ΔAy=Δy·Ay/h,使全站仪在水平方向上旋转ΔAx、在竖直方向上旋转ΔAy后测距轴指向靶标中心点,最后进行坐标测量。
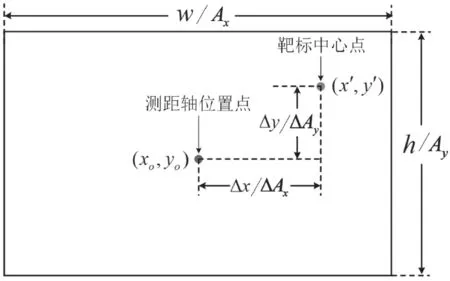
图3 计算靶标中心方向
3 测试结果
该文测试中设置相机分辨率为最高的2 560×1 920,放大倍率为1。
通过徕卡GeoCOM提供的API接口,开发基于笔记本电脑的终端应用程序,通过RS232串口数据线、蓝牙或者Wi-Fi等方式连接全站仪。设站完成后,通过笔记本电脑上的应用程序控制全站仪对靶标进行拍照,如图4所示。

图4 全站仪拍摄的靶标影像
通过训练Faster-RCNN深度学习神经网络对拍摄中的图像进行靶标识别,靶标概略定位结果如图5所示。

图5 标靶概略定位
截取概略定位范围内的图像,按照2.5节处理流程进行靶标中心拟合,结果如图6所示。
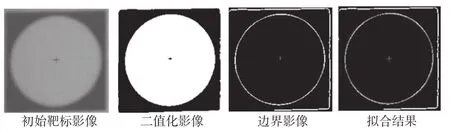
图6 标靶中心拟合
首先,根据拟合得到的靶标中心点的图像坐标计算全站仪在水平方向上的旋转角度ΔAx和在竖直方向上的旋转角度ΔAy;其次,根据旋转角度控制全站仪测轴指向靶标中心点;最后,控制全站仪进行坐标量测并获取测量结果。
为验证该文自动测量方法在不同距离下的精度,选择在35 m、85 m以及135 m不同距离下分别对7个测点进行测量,结果见表2~表4。
观察表2~表4可知,较差均在mm级且随着观测距离变长,较差绝对值的平均值也会变大。

表2 35 m处的测量坐标对比结果
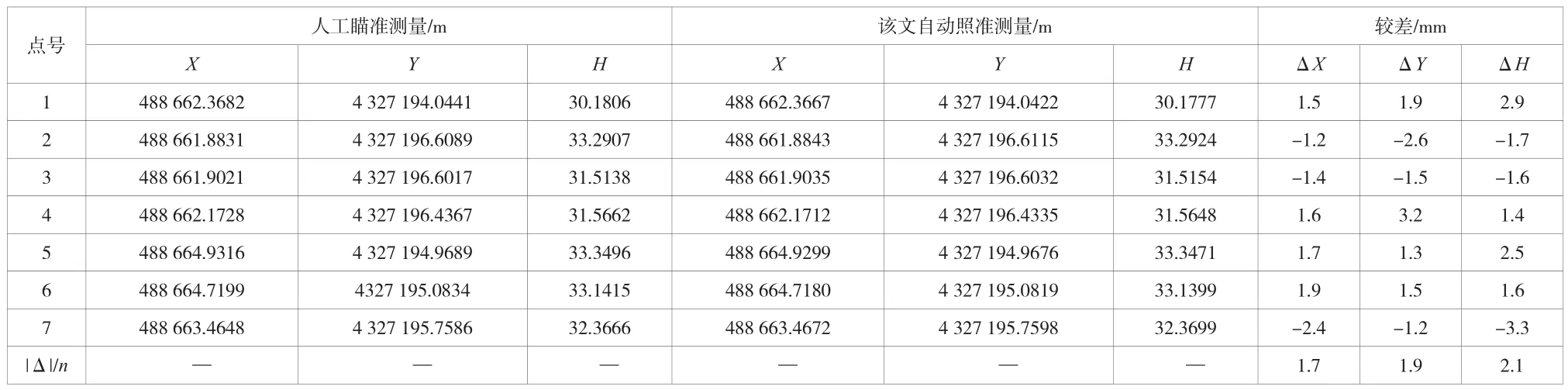
表3 85 m处的测量坐标对比结果
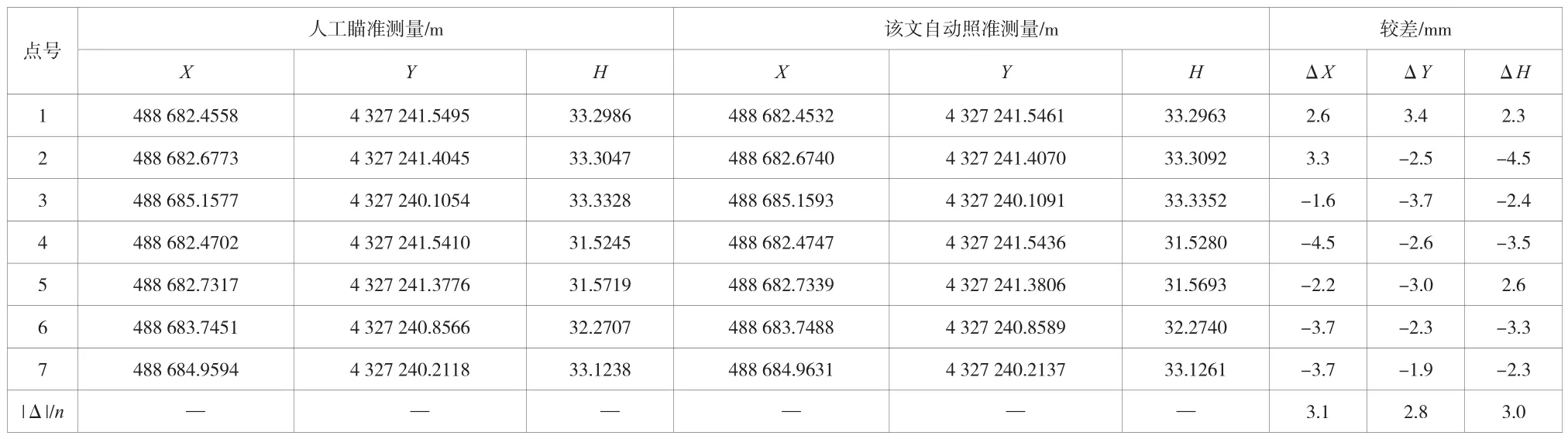
表4 135 m处的测量坐标对比结果
4 结语
该文基于全站仪自动照准原理,提出了利用图像全站仪的相机实现目标中心自动照准的方法。通过测试分析可以得出结论:在135 m的观测距离内,利用该文的自动照准方法,图像全站仪可以达到mm级别的测量精度,具有广阔的应用前景;随着观测距离的变长,该文的自动照准测量误差也开始变大。
但是在该测试中也发现,对部分场景下的靶标无法做到自动识别,图像识别后的中心拟合精度也有待进一步提高。
