无人机水质遥感监测方法
2021-09-13朱熹刘黎明叶张林
朱熹 刘黎明 叶张林

摘 要:面对高分辨率水质监测的需求,运用无人机多光谱传感器,本文提出了一种水质参数反演方法。以上海市淀山湖和元荡为实验区,总磷、氨氮、高錳酸盐、溶解氧为待反演水质参数,构建相应的反演模型,基于国家标准得到水质类别。实验结果显示,各水质参数相对误差均在30%以内,湖内的污染主要集中在细小分支和岸边。
关键词:无人机多光谱;水质监测;水质反演
中图分类号:X832 文献标识码:A 文章编号:1006—7973(2021)07-0157-03
1引言
水资源是我们赖以生存的重要资源[1],然而人类活动对水环境的影响日趋严重。传统检测方法主要以实验检测法为主,但是该方法需要大量的人力物力,且覆盖范围有限,需要新的手段相结合构建新的水质监测体系。遥感由于其成本低,速度快,监测面积大等优点被广泛应用于水质监测,但是针对更小尺度上的河道,受限于卫星传感器的时空分辨率,卫星遥感反演的效果受限,此时无人机遥感的优势得以体现[7-8]。无人机具有机动灵活、操作简便、时空分辨率高等优点,可以根据监测水域特征制定不同的检测方案,及时发现水质问题区域,对于微小水域的水质监测具有重要意义。
目前水质反演方法主要分析法,经验法[2-6]等。分析法主要基于水体的光谱反射散射特性,建立在光学传输的理论基础之上,具有严密的物理逻辑推演过程,但是所需辅助数据众多,模型构建过程繁琐且具有一定的区域局限性。而经验法建立在样本数据与光谱数据的统计关系之上,模型构建成本低,指定区域季节内精度较高,但采样难度高难以与卫星影像同步匹配[7-8]。
近些年来无人机的应用领域在不断拓展,其中有针对叶绿素相对含量反演,还有在水环境中应用于水土流失状况分析,但目前针对水质反演的研究还较少,基于此,本文以上海市青浦区金泽镇淀山湖部分区域为实验区,利用样本点、地面光谱仪、纵横无人机及K6多光谱相机构建DO(溶解氧)、CODMN(高锰酸盐指数)、TP(总磷)、TN(总氮)、NH3(氨氮)的遥感反演模型,并验证其精度。
2研究区及数据
本文以青浦区金泽镇淀山湖风景区为实验区,水域以淀山湖和元荡为主,2019年7月31日飞行一个架次,覆盖面积约3平方公里。
与此同时,在无人机飞行期间,同步采取40个水样并在当天送检,检测指标为总磷、总氮、氨氮、高锰酸盐、溶解氧。
3水质参数反演模型构建
3.1等效反射率计算
对于多光谱及高光谱传感器,每个波段都有一定的光谱响应宽度,同时在该波长宽度范围内的入射辐亮度并没有被完整的记录,一般会有一个单峰函数来描述该波段的辐射接收情况,即为光谱响应函数,是传感器在每个波长接受的辐亮度与入射的辐亮度的比值。
那么传感器在每个波长接收到信号时,利用以下这个公式求出无人机多光谱通道(波段)信号的等效反射率值。
其中g函数代表传感器的光谱响应函数,X代表着在该波长的实测反射率值。共获得450nm、490nm、550nm、615nm、650nm、685nm、725nm和808nm八个通道地的光谱响应函数,如图1所示。
将实测的水体反射率曲线与各通道的光谱响应函数按照上述公式计算即可得到对应于该多光谱相机的等效反射率。
3.2水质参数敏感性分析
通过分析单波段及组合波段与实测水质参数之间的相关性,挑选相关性较高的组合,从而为设计相应的模型提供支持。其中单通道相关性如下图所示。
由上图可以看出,除DO(溶解氧)外,CODMN(高锰酸盐指数)、TP(总磷)、TN(总氮)、NH3(氨氮)与单波段等效反射率的相关性都不高(<0.5),无明显相关性,需要进行波段比值的相关性分析。除此之外对各波段组合也进行相关性分析。
3.3反演模型构建
3.3.1 CODMN反演模型构建
CODMN于725/550波段处有较强的相关性,因此选择725nm和550nm作为特征波段,使用波段比值构建模型。
在建模之前并不是所有的样本点数据都可以用于建模,如果建模数据中存在一些异常点都会对模型性能造成较大的影响,因此需要在建模之前对异常点进行剔除。将725/550比值与CODMN分别进行排序,再根据平均值和标准差设定阈值,将数据点与平均值差值绝对值大于阈值的点删除。
对数化后的CODMN与特征波段比值有明显的线性关系,通过最小二乘求解可得。
3.3.2 TN反演模型构建
TN与单波段相关性都较低,但是从550-615相关系数有明显下降,从685-725有明显上升,结合615/550、725/685的比值相关性较高,选取该比值为特征波段。随后去除异常值并取对数,采用多元线性回归构建模型。
4水质反演结果
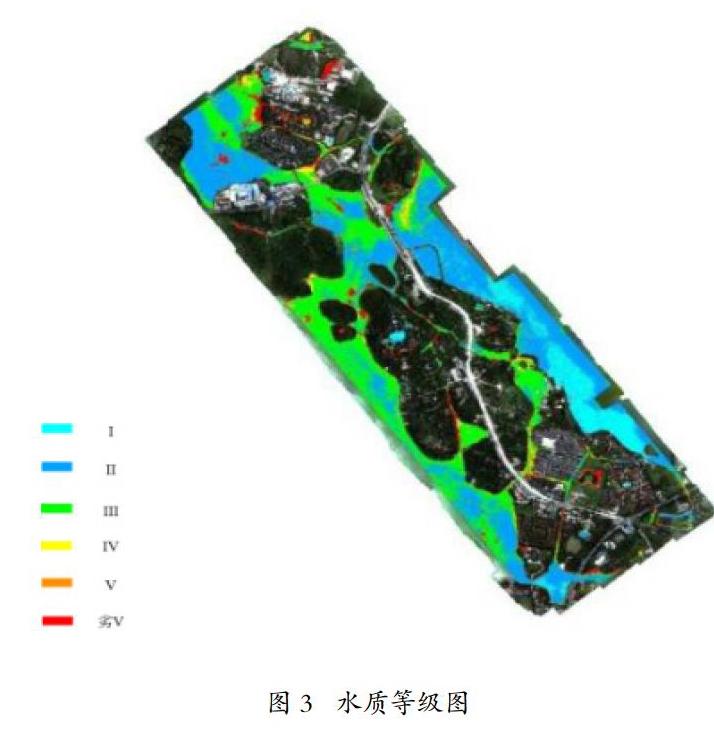
对预处理过后的无人机遥感数据,针对各水质参数进行遥感水质反演,得到研究区域内个水质参数浓度,再根据国家标准及单一指标评价法,生成水质等级图,分为I类至劣V类共六类水质等级。
由上图可以看出,淀山湖区域水质以II类为主,而元荡则以III类为主,其中V类及劣V类主要分布在细小河道和水体边缘地区,一方面原因是岸边地区是排污区域,所以一定程度上反映排污分布情况,另一方面原因则是岸边有河岸、植被、阴影的影响,同时混合像元现象普遍存在,造成类别的误判。
5精度验证
采用样本数据进行相对误差验证,结果显示CODmn的相对误差最低,DO的相对误差较高,综合来看相对误差都在30%以下,具有较高的精度。
6结论
利用无人机多光谱数据以及准同步水质采样数据,构建水质反演模型,反演总磷、总氮、氨氮、高锰酸盐、溶解氧五类水质参数,结合单一因子评价标准得到水质指标。本文实验结论表明,各类水质参数相对误差率均低于30%,错分像元主要集中于河岸区域,大部分区域误差在一个类别以内,展现了较高的精度。
除此之外,本模型主要针对夏季的水质样本,是否有全季节适用性还未进行探究,未来面向全季节的水质反演依然有可提升的空间。
参考文献:
[1]马荣华,段洪涛,唐军武等.湖泊水环境遥感[M].北京:科学出版社,2010.
[2] A. G. Dekker,S. W. M. Peters. The use of the Thematic Mapper for the analysis of eutrophic lakes: a case study in the Netherlands.[J]. International Journal of Remote Sensing,1993,14(5).
[3] Han, L., and D. C. Rundquist. The Response of Both Surface Reflectance and the Underwater Light Field to Various Levels of Suspended Sediments: Preliminary Results. Photogrammetric Engineering and Remote Sensing, vol. 60, no. 12, 1994, pp. 1463–1471.
[4] Buckton, Daniel, et al. “The Use of Neural Networks for the Estimation of Oceanic Constituents Based on the MERIS Instrument.” International Journal of Remote Sensing, vol. 20, no. 9, 1999, pp. 1841–1851.
[5] Han, L., and D. C. Rundquist. The Response of Both Surface Reflectance and the Underwater Light Field to Various Levels of Suspended Sediments: Preliminary Results. Photogrammetric Engineering and Remote Sensing, vol. 60, no. 12, 1994, pp. 1463–1471.
[6]武文波,劉正纲.一种基于地物波谱特征的最佳波段组合选取方法[J].测绘工程,2007(06):22-24+33.
[7]杨振,卢小平,武永斌,苗沛基,周俊利.无人机高光谱遥感的水质参数反演与模型构建[J/OL].测绘科学:1-8[2020-06-11].
[8]邹凯,孙永华,李小娟,邢瑞.基于无人机遥感的水质监测研究综述[J].环境科学与技术,2019,42(S2):69-75.
基金项目:上海市科学技术委员会,基于高分遥感的近海水环境监测关键技术研究及示范应用(19511100900)。
