基于人机工程学的爬楼辅助电动轮椅设计研究
2021-09-13曹馨颖白宇王坤
曹馨颖 白宇 王坤


关键词:人机工程学;爬楼辅助电动轮椅;设计
1 人机工程学概述
人机工程学是研究人、机械及其工作環境之间相互作用的学科。该学科在其自身的发展过程中,逐步打破了各学科之间的界限,并有机地融合了各相关学科理论,不断地完善自身的基本概念、理论体系、研究方法以及技术标准和规范,从而形成了一门研究和应用范围都极为广泛的综合性边缘学科。因此,它具有现代各门新兴边缘学科共有的特点。人机工程学研究的内容及对工业设计的作用可以概括为以下几个方面:(1) 为工业设计中的“人的因素”提供人体尺度参数;(2) 为工业设计中“物”的功能合理性提供科学依据;(3) 为工业设计中的“环境因素”提供设计准则;(4) 为进行“人—机—环境”系统设计提供理论依据;(5)为坚持以“人”为核心的设计思想提供工作程序[1]。
2 国内外爬楼辅助电动轮椅设计现状
随着世界人口老龄化进程的加快,爬楼辅助电动轮椅的需求在逐年扩大,研究人员对爬楼辅助电动轮椅结构设计和智能控制等方面研究颇丰。如今,国内外有关智能爬楼辅助电动轮椅的研究成果非常多,例如美国麻省理工学院的WHEELESLEY 项目、法国的VAHM 项目、德国乌尔姆大学的MAID 项目、西班牙的SIAMO 项目和我国863 智能爬楼辅助电动轮椅项目等[2]。我国在智能爬楼辅助电动轮椅的研究上起步较国外略晚,在机构的复杂性和灵活性与国外相比有些许差距。爬楼辅助电动轮椅自动化程度高,所以造价较高,对于大部分轮椅使用者来说费用较贵,另外,在结构上,根据爬升结构的不同可以分为三种形式,分别为行星轮机构、履带轮式机构和腿足式机构[3]。近年来研究主要关注于履带式优化设计,但履带式体积较为庞大且在原理上存在缺陷,容易对楼梯造成破坏;腿足式速度较慢,结构复杂,控制系统繁琐;行星轮原理简单,容易实现[4]。
国外爬楼辅助电动轮椅品牌有美利驰、悍马、萨瓦瑞亚等,国内品牌有旭威、亨格力、互邦、AI、威之群等。表1 为各个品牌爬楼轮椅的特点。从中可以看到目前主流爬楼轮椅存在的问题为:不够轻便、人机性不足、造价高,而且结构复杂。无论是外挂式还是底部隐藏式,都影响整体外观的改进。此次研究采用行星轮结构,结构简单,实现了半自主化爬楼和平地行走功能,并利用自锁机构保证上下楼梯时不翻车。
3 基于人机工程学的爬楼辅助电动轮椅设计思路
3.1 尺寸设计
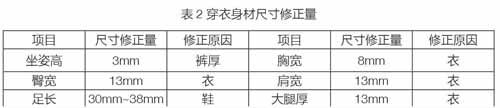
电动轮椅的尺寸主要参照国家标准轮椅车的第7 部分座位和车轮尺寸测量(GB/T18029.7-2009),整车长L1=1200mm,整车高H5=1050mm,整车宽W6=670mm。整体设计考虑轮椅的通用性,人体生理特性及舒适性能等综合因素,对轮椅进行系统设计与分析[5]。轮椅的整体尺寸设计需参考人体尺寸模型,并在设计中考虑衣服的厚度与余量[6],具体可参见表2。座面深应保证人体的臀部能够得到全部支承,并且保证电动轮椅的前缘部分过渡平滑,以避免其与大腿接触时引起人体的不舒适。结合坐姿人体模型尺寸如图1 所示,采用第5 百分位数据,使小身材用户的小腿后侧不受压,座深太深会使椅面外沿顶住腘窝处,长时间施压会导致过血困难,容易疲劳,人机尺寸应该是范围值,坐姿臀宽一般尺寸范围为380 ~ 420mm ;小腿加足高尺寸范围为380 ~ 400mm ;相当于为臀部至大腿全长的3/4 ;座深范围为400 ~ 420mm ;扶手在设计中不应过宽或过窄,坐姿肘高范围为200 ~ 250mm ;两扶手间距范围为380 ~ 430mm 之间;脚托宽度应为足长的3/4,尺寸范围为200 ~ 230mm。
在设计座面时主要是参考当用户坐下时两臀之间或两股之间的距离,当座位太窄时,上下轮椅会比较困难,体重中心落于坐骨上,大腿组织易受压迫;而当座位太宽时,人们不易坐稳,同时在操纵轮椅时也不方便。而且由于轮椅用户需要适时的调节就坐姿势以避免脊柱的持续性压力和肌肉的疲劳,座面以宽为好,男性座宽一般大于女性,故采用男性座宽P95 百分位数382mm,另外这个尺寸还要受到轮椅结构的限制,考虑轮椅用户的着装修正量。轮椅车座宽尺寸为W3 = 420mm,坐深为L2 = 410mm,靠背高度为H6 = 450mm,小腿加足高尺寸为H2 = 400mm,坐姿肘高为H3 = 220mm,坐面到轮子底部高为H1 = 590mm,a 把手到地面高度H4 = 950mm,椅面靠背与座面夹角α = 100o。
在轮椅的实际应用中,必须考虑用户着装的情况,所以需要给衣物留一定量的余量,就相当于在人体尺寸的基础上增加着装修正量。
3.2 座面和靠背设计
用户使用轮椅时,分为直立坐姿和倚靠坐姿(成角度倾斜坐姿)两种,不同坐姿对于座面和靠背的施压效果不同。根据人体解剖学可得知,人体的坐骨粗壮,能够承受更大的压力,然而大腿根部有很多血管和神经系统。当承受的压力过大时,会影响到大腿根部的血液循环和神经传导,进而引起人体的不适,所以坐垫的压力应该按照臀部各个部位承受的压力不同进行设计,即人体坐骨处的压力增大时,压力逐渐向四周减小[7]。因此,轮椅的坐面设计采用的是与臀部形状相适应的曲面形态,并使用记忆棉材料辅助增加弹性提高座面舒适度。如图2 中a 区表示直立坐姿座面压力分布,红色区域表示压力最大,橙色、黄色、绿色、蓝色到紫色区域呈现压力递减的趋势。由于直立坐姿,如图2 中b区所示,腰靠起到支撑作用,而肩靠基本不受力。
如图3 所示,人体在放松状态下,脊柱成自然生理弯曲,不同坐姿时腰部受力不同,腰椎越接近自然弯形其受力就越小。如果坐姿形成正常的腰曲弧线,躯干与大腿之间必须有大于90°的角度,并在腰部有所支撑,保证腰弧曲线的正常形状是获得舒适坐姿的关键[8]。腰靠应满足腰椎弯曲曲线,以保证腰部得到充分支持,因此腰靠进行了可回弹设计,可根据人体上半身重心分布自调角度。腰椎部的中心位置约在座位上方165 ~ 210mm 处,腰椎支点略高于此高度,腰靠的高度至少要等于腰椎支点的高度,从而支持背部重量,所以腰靠的高度在轮椅座面上220mm 处,为了使背部下方骸骨和臀部有适当的后凸空间,座面上方与靠背下部之间应留有一定空间。如图3 中a 区依靠坐姿的座面压力分布比直立坐姿大,这说明依靠坐姿椅面压力分布更广泛,属于大变形弹塑性有限元分析[9]。人体重量被分摊到椅面上,有利于用户长时间保持坐姿,而不易产生疲劳。红色区域表示压力最大,正好是坐骨的施压点,橙色、黄色、绿色、蓝色到紫色区域呈现压力递减趋势。依靠坐姿在椅背体现的最大变化是肩靠支撑明显,整个上身由肩靠和腰靠共同支撑,有效支撑面积明显增大,分摊支撑压力效果好,适于久坐。
3.3 把手和扶手设计
爬楼辅助电动轮椅主要有a 把手和b 扶手,如图4 所示,a把手为上楼时辅助人员抓握使用,b 扶手为轮椅用户日常使用。
考虑到爬楼时需要辅助人员,a 把手前端直径D 的一般范围在25 ~ 30mm,把手中间部分最大直径小于40mm,手部抓握长度范围应为100 ~ 125mm 左右,否则如图5 中(a)所示把手太粗或如图4 中(c)所示把手太短都不好抓握。设计时不应采用硬度较高的材质,否则会增加手部疲劳感。把手与水平之间角度为10°左右,a 把手的离地高度H4 = 950mm 左右。
b 扶手部分的高度和间距尺寸在一定范围内会影响轮椅的舒适性,同时适当的轮椅扶手高度有利于保持正确的身体平衡和正确的坐姿,并可以放松上肢。当扶手太高时,上臂会被迫抬高,容易产生疲劳感;当扶手太低时,则需要上身前倾影响呼吸[10]。这取决于用户肘部的平放高度,根据百分位选择的原则和坐姿时肘高尺寸,选取第50 百分位的数据,并且要考虑着装修正量、人手臂自然下垂的舒适程度,一般会低于第50 百分位的数据值。参见表3,男性舒适扶手高度(高出轮椅座面)为250mm 左右,女性的舒适扶手高度230mm 左右(直立坐姿),但考虑到座面与靠背的倾斜角度即倾斜坐姿,一般会在扶手高度为220mm 左右比较合适。
3.4 功能结构设计
在功能上将辅助爬楼与自动行走结合起来,当用户上楼梯时其他人可以辅助轮椅爬楼如图6 所示,从而保证用户安全,而平地行走时可实现自主行走如图7 所示。因此,轮椅采用行星轮式设计。平地行走时,行星轮通过主轴马达带动行星轮前进,爬楼时,通过顺时针摇臂结构及人力方向辅助,使其缓慢平稳的爬楼。
3.5 色彩设计
运用感性工学对产品色彩进行评价,并结合语义差分法(SD法)对用户的色彩感受进行测量。从外观色彩入手,爬楼辅助电动轮椅比较常见的色彩搭配是以黑色为基色,灰色为辅色。在爬楼辅助电动轮椅设计时应适当增加橙、绿、蓝等色彩,使爬楼辅助电动轮椅附以温暖、宁静的情调,缓解使用者的孤独感[11]。结合整体的轻质感,采用绿灰黑、蓝灰黑、橙灰黑三种配色方案如图8 所示。在广泛收集感性词汇的基础上,经过研究分析,将感性词汇确定为:轻快—沉稳、温暖—寒冷。基于这四种外观色彩和两组感性词汇使用语义差分法,编写调查问卷,共发放125 份调查问卷,收回调查问卷120 份,其中有效问卷有118 份。
在数据整理中设外观色彩为X1、X2、X3、X4,设感性词汇为Y1、Y2,通过加权平均法将各样本中不同形容词的评分进行统计,根据加权平均值的计算式为:
从图9中可以看出用户对白、灰、黑的评价偏沉稳和寒冷,相比之下橙色和绿色体现了一种轻质感,同时给人温暖的感觉,该研究表明橙色和绿色的配色方案更符合市场的实际需求。
3.6 材质设计
爬樓辅助电动轮椅的材质讲求轻便,所以选用的靠背不易过重,可以选择强度较好、质量较轻的材料,并且材料要具有一定的弹性,从而增加人体的舒适感,同时靠背的硬度也要适中,才能满足其舒适程度[12]。
以航空铝或其他铝合金型材料为主,并配不锈钢辅件,这样在造价和耐用性上更有优势,碳纤维等复合材料虽然更轻且强度好,但是造价过高,只适用于高端用户。
爬楼电动轮椅坐垫采用记忆棉材料,保证舒适和质轻,钢架采用无缝钢管,通过液压弯管机折弯工艺一次成型,然后通过氩弧焊接,使焊缝均匀美观,整体呈流线型,体现出圆润之感,增加了视觉舒适性,如图10 所示。而在行星轮和传动装置采用模组化设计中,要避免使用连接件,通过轻量化设计优化结构和强度,使轮椅的重量更轻、结构更强,同时通过减少组件数量,降低工人组装强度,便于批量化生产。通过集成化设计使电池模组植入两根斜架主梁内部,如图11 所示,爬楼辅助电动轮椅主体框架结构轻盈,采用一体化成型方式,避免了外观的繁杂与凌乱感,并提升了用户的安全性。
4 结语
文章设计了一种半自主化行星轮爬楼辅助电动轮椅,并结合了电动爬楼辅助电动轮椅和手动爬楼的优势,通过人体工学分析和感性意象分析的方法,完成该轮椅的结构设计,提高了人机舒适性和感性意象匹配度。该定量加定性的人机工程设计研究方法适用于爬楼辅助电动轮椅设计,为爬楼辅助电动轮椅的造型、人机、色彩等设计提供了参考。
