多传感器融合低成本农机自动导航方法
2021-09-13俞娟卢伟曾梦洁赵思佳
俞娟 卢伟 曾梦洁 赵思佳


摘要:针对现有大田农机高精度卫星导航成本高,且受气象环境影响较大的问题,该文提出了一种基于 D-S-CNN 的农田多传感器融合的自动导航方法,实现田间低成本、高精度定位导航。首先,将低成本卫星导航、惯性导航、视觉导航传感器的数据进行预处理,分别得到拖拉机的位置、姿态信息,然后通过 D-S 证据理论进行传感器失效检验,最后将三种传感器的位置、姿态信息以及 D-S 证据信任函数矩阵输入 CNN 神经网络进行信息融合实现田间高精度定位。实验表明,采用基于 D-S-CNN 的农田多信息融合导航方法,在离线测试中,无传感器失效情况下定位精度为4 cm,单个传感器失效情况下定位精度为10 cm,定位时间约17 ms;在实际测试中,无传感器失效情况下定位精度为6 cm,单个传感器失效情况下定位精度为13 cm,且该算法具有较好的鲁棒性和实用性。
关键词:智能拖拉机;导航;传感器信息融合;卷积神经网络
中图分类号: TP274.2文献标志码: A文章编号:1674–5124(2021)12–0106–08
Low-cost agricultural machinery intelligent navigation method based on multi-sensor information fusion
YU Juan1,LU Wei2,ZENG Mengjie2,ZHAO Sijia2
(1. Sanjiang University, Nanjing 210012, China;2. College of Artificial Intelligence, NanjingAgricultural University, Nanjing 210031, China)
Abstract: The existing agricultural machinery precise navigation method using GPS/BD costhighlyand also stronglyinfluencedbythecomplicatedfieldmicroclimate. Thispaperproposedafarmlandintelligent navigation method basedon multi-sensorand visualfusion usingD-S-CNN to realizelowcostand high precision positioning navigation infield. Firstly, satellite navigation, inertial navigation and visual navigation information were got after preprocessing. Then the sensors failure test was carried out and the D-S evidence trust matrix was calculated by using D-S evidence theory. Finally, the high precision position navigation was achieved by using sensors data of position, posture and D-S evidence trust matrix as input. The experiments results showed that the position accuracies were 4 cm and 10 cm in the cases of none and one failure sensor respectively. And the positioning time was 17 ms. The experimental position accuracies in actualworkcondition were 6 cm and 13 cm in the case of none and one failure sensor with good robustness.
0引言
随着农业自动化的进一步发展,导航技术在农机应用中更为广泛。目前导航定位技术包括绝对定位和相对定位两种。其中常用的绝对定位技术是卫星导航定位[1],主要为全球定位系统(globalpositionsystem, GPS)和北斗卫星导航系统(BeiDou NavigationSatellite System, BDS)。GPS 和 BDS 能够提供定位物体的绝对位置信息,由于在复杂多变的农田中存在小气象环境和偏僻的地理位置,常因恶劣天气导致卫星信号弱、树木遮挡卫星信号等因素,造成卫星信号短时丢失甚至中断。差分全球定位系统(differential global position system, DGPS)[2]虽然精度较高,但是由于天线放置于拖拉机顶部,当农田中车体倾斜时,定位位置与车轮实际位置产生较大误差,且成本较高,不适用于农田导航。农机中相对定位技术应用较为广泛的是惯性导航、视觉导航以及激光雷达。惯性导航器件的特点是体积、质量、功耗都较小,但目前对于惯性导航系统的姿态角测量一般采用航位推算原理,其积分运算使导航误差迅速积累,无法满足长时间工作的高精度导航系統的指标要求。Liu[3]等提出一种根据最优导航控制原理自动跟踪目标路径的系统,系统硬件由两个 GPS 模块,两个 Zigbee 无线传输模块和一个惯性传感器组成,利用 GPS 模块对惯性导航数据进行修正,实验表明最大横向误差分别为0.16 m 和0.27 m,实际应用中误差较大。为实现大田的精确导航,激光平地机作为一种新型农田平整技术[4]被研究出来用以提高农机的导航精度,并作为标准化农田的前道工序[5]。此外,近年来,单目视觉 SLAM(simultaneouslocalization and mapping)技术发展迅速,由最初的基于滤波的方法逐渐发展到基于关键帧的方法。齐乃新等[6]提出了一种基于辅助匹配的1点 RANSAC 单目视觉导航算法,解决了主动视觉匹配失效问题,提高了1点 RANSAC 单目视觉导航算法的导航精度,SIFT 求解的有效匹配点精度在5个像素之内, 减小了航向角、俯仰角、滚动角的平均误差;但仅靠单一视觉导航作业,导航精度难以有较大提升。视觉导航成本低廉,具有短距离导航精度高的特性,但是由于田间光照环境复杂多变,有时会造成视觉定位的失效。由于摄像头的局部感知特性,在复杂多变的作业环境下常常使用视觉导航实现局部的环境感知[7],辅助其他导航系统减小导航数据误差以提高导航精度。Bengochea-Guevara[8]等设计了一种田间自主导航车辆,该车辆通过视觉跟踪作物行并遵循车辆定位路径规划进行自动导航,在平缓地面有较好的导航效果,但在不规则及起伏较大的地面效果不佳。目前智能无人驾驶车辆[9]多采用激光雷达等进行导航,但其安装高度较低,在农田中易受污而影响检测且成本较高,且其高速转动部件难以适应农田强振动环境。
为了增强导航系统在环境复杂多变的农田中的适应性和鲁棒性,许多学者开始将多传感器信息融合方法作为农机导航研究的重点方向[10]。Zaidner[11]等提出了一种用于传感器数据融合的高精度定位系统的方法,利用似然比检验作为选择最可能状态估计的决策技术,实现了 DGPS,IMU 和视觉传感器的数据融合,与标准卡尔曼滤波器相比定位效果更好,但仅停留在仿真阶段。张铁民[12]等设计了多传感器信息融合的导航控制系统,实现小车的路径跟踪控制,但对规范路径依赖性高。黄钰平[13]设计了一种 GNSS/DR 组合导航系统,该系统使用自适应扩展卡尔曼滤波器进行优化,能够在卫星失效的区域内获得可靠的定位信息,但成本相对高昂。张京[14]等提出一种 GNSS/INS 航向信息融合导航系统,实验结果表明,融合后的导航精度有了明显提高,并且能够消除 GNSS 航向角的测量噪声,GNSS 航向角解算值的更新速率也得到了有效提高,但对于复杂多变的农田环境应用性相对较低。
由于目前农业稻麦作物行距正常在10~20 cm以内,不同的农作物的理想行距会有细微差异,农机导航精度要求已经逐渐提升到厘米级。文献[15]中以东方红 X-804拖拉机为平台,开发了一种基于 RTK-DGPS 定位和双闭环转向控制相组合的农业自动导航系统,横向跟踪误差不超过9 cm,但针对 DGPS 信号短时丢失问题没有较好处理。文献[16]针对视觉导航系统在果园环境中面临的图像背景复杂、干扰因素多等问题,提出了一种基于 U-Net 网络的果园视觉导航路径识别方法,平均距离误差为4.4 cm,但其适用范围小。文献[17]针对农机在环境干扰情况下 BDS 失调、INS 单独导航误差大的不足, 以 BDS/INS 两者间位置、速度差值为模型,提出蜂群算法优化 BP 神经网络辅助卡尔曼滤波的算法组合导航,精准定位农机位置速度信息,使速度误差小于0.6m/s,位置误差小于30 m,其导航精度偏低。
针对目前农田环境复杂传感信号短时失效、农机导航精度不高以及导航设备价格昂贵的问题,本文提出一种基于 D-S-CNN 的农田多传感器/视觉信息融合导航方法,将 D-S 证据理论与 CNN 神经网络相结合,实时获取传感器的故障概率,提高数据融合可靠性,减小数据融合误差,从而提升导航数据的精度至厘米级。在复杂环境下实现大田农机的高精度、低成本导航。
1实验装置
实验装置由拖拉机本体(常发 CFD504A)和北京合众思壮公司的 MG858S 高精度 GIS 采集器、HiPNUC公司的 H1219M 陀螺仪以及视觉摄像头(PC CAMERA)组成。由于可见光摄像头的感知距离有限,摄像头选择安装在农机前方,摄像范围是农机前方几米内的距离,安装位置如图1所示。传感器具体数据如表1所示。实验选取部分小麦田进行导航实验研究。
2基于多传感器/视觉信息融合的定位导航技术
考虑到融合的多传感器信息为多输入、非线性强,且田间复杂环境中个别传感器可能存在实现状态,传统的融合模型精度较低,因此,本文拟采用 D- S 证据理论结合卷积神经网络(convolutional neural network, CNN)进行多传感器信息融合,技术框架如图2所示。
2.1基于 GPS 的田间导航
GPS 定位技术用于农田信息采集和作业时,为了方便地计算距离和速度,常常需要将 GPS 测定到的拖拉机的经纬度坐标数据转换为以地平面上平面直角坐标系中的X、Y 坐标。
已有研究表明,GPS 数据通过卡尔曼滤波处理后效果较好,因此本文先采用卡尔曼滤波对采集的经度数据进行处理,具体步骤如下:
1)首先建立采集系统状态方程
式中:Li、Ni——经度系统状态与测量向量; Oi、Fi——状态噪声与测量噪声向量;
Ai、Gi与Ji——系统状态转移矩阵、输入关系矩阵与测量关系矩阵。
2)卡尔曼滤波假定Oi和Fi为零均值、不相关的高斯白噪声,即满足
式中:Ki、Zi——Oi和Fi的协方差矩阵;
dij——克罗内克函数。
3)测量更新方程
4)时间更新方程
式中:i| j——经度状态估计值;
Pi|j?系统状态估计误差△i|j = Li? i|j的方差矩阵。
纬度数据 B 也采用上述方法处理。然后采用高斯-克吕格投影法来将椭球面上的经纬度坐標转为平面坐标。高斯—克吕格投影族通用公式,如式 (5)和(6)所示:
其中,c =0.99996为比例因子,S 为从赤道开始的子午线弧长,l 为地理经度与中央经线的经度之差,B 为地理纬度,a 为地球长半轴,bl为地球短半轴,g 为重力加速度,c =a2/ bl,t =tan B,η= e\2gcos2 B,N = c/√l +η2,e\=√a2? bl2/c。得到的平面坐标( xp,yp)记为PG。
2.2基于惯性技术的田间导航
惯性导航中用互补滤波的方式估计姿态效果较好,因此本文先将采集到的数据进行卡尔曼滤波,然后将滤波后的数据进行互补滤波得到拖拉机位姿信息。惯性导航系统中涉及的坐标系主要有导航坐标系、拖拉机坐标系、大地坐标系,本文分别用 n,b, e 表示以上3个坐标系。惯性导航系统中主要的姿态参数包括拖拉机的横滚角、俯仰角以及航向角,本文分别用θ,?,ψ表示。方向余弦矩阵反映两个不同坐标系之间的关联关系,使用Cn(b)体现拖拉机坐标转换为导航坐标的关系。四元数法是姿态解算过程中常用的方法,本文使用该方法对陀螺仪的信息进行解算。
四元数是空间变量,有4个自由度,由实数加上3个元素i,j,k 组成,一般可记为Q = q0+ iq1+ jq2+ kq3。
1)四元数与方向余弦矩阵的换算关系如下:
2)从四元数中获得重力向量和磁场向量
3)令bx =√hx(2)+ hy(2),bz = hz,得
4)计算误差得
5)利用误差修正陀螺仪
6)更新四元数
7)由此得出四元数与拖拉机姿态角关系:
将获得加速度信号去除奇异点以及强力去噪,再进行一重积分(采用梯形法求速度)获得拖拉机的运动速度信号,再通过对运动速度信号的一重积分获得拖拉机运动位移,结合位姿信息求解拖拉机在平面坐标系中的运动路径(xI,yl)坐标记为 PI。
2.3基于视觉图片序列的田间导航
近些年来,机器视觉伴随着图像处理技术,模式识别技术,人工智能技术和计算机控制技术的发展,技术方法逐渐完善,己经成为智能机器人的重要组成部分。目前,在农业机械视觉导航方面一般采用作物行直线检测,在复杂背景及杂草噪声较强的环境下不能准确提取作物行信息,对此本文采取使用单目摄像机采集视频信息,进行帧间图像特征匹配的视觉导航方法。由于成像系统和目标的距离和方位的原因,会导致形成的图像发生透视而不再是正视图,这对于图像的特征提取非常不利,需要进行图像矫正,同时在特征提取时又要保证特征点对于图像的尺度变换、仿射变换等具有特征不变性及较好的实时性,本文提出一种基于 Hough-PT- ORB 特征提取的图像序列匹配视觉导航算法,具体步骤如下:
1)利用张正友标定法对相机内参数进行标定,标定矩阵 K 如下:
2)利用标定之后的相机采集拖拉机在实验田间的运动视频,获取图像序列,进行图像矫正,具体步骤如下:
①一个二维图像经过透视变换成为另外一个平面图像,这个过程表示为:
式中:(x,y )——畸变图像的像素坐标;
(u,v )——正视图的像素坐标;
h,o,p,q,r,f,s,w ?透视变换(perspective transformation,PT)参数。
②把畸变图像中的各个像素点坐标记为(x1,y1),(x2,y2),(x3,y3),(x4,y4);相应的正视图中的点坐标记为(u1,v1),(u2,v2),(u3,v3),(u4,v4):
③可以得到透视参数 M
④用解出的透视参数对原透视图像进行透视变换,得到矫正图。
3)用 ORB(Oriented FAST and Rotated BRIEF)算法对矫正后的图像进行特征提取
①建立图像高斯金字塔,提取每一层图像的FAST (Features From Accelerated Segment Test)特征点。
②添加特征点的方向因子。以特征点为中心建立一个图像块,定义图像块各像素点的矩为
式中:α,β——矩的阶次;
I(x,y)——图像灰度表达式。
利用零阶矩和一阶矩来计算质心的坐标。建立一个从图像块的中心到质心的向量作为方向因子,向量的方向可简化为z = arctan(m01 , m10)。
③引入旋转因子。利用二进制鲁棒独立的基本特征(binary robust independent elementary features, BRIEF)方法描述特征点,并在此基础上采用方向因子驱动法实现二进制字符串向量的旋轉。在 BRIEF 方法中,对于一个Na×Na大小的图像块p,有如下定义:
选取nv个特征点得到的nv维向量如下:
定义一个2×nv的矩阵:s =),利用方向因子 e 和基础旋转矩阵Rλ,定义Sl = Rls。得到最终的特征点描述子如下式所示。只要λ确定了,便可快速获得描述子。
4)利用提取的特征进行匹配推算位移,得到的平面坐标(xv,yv)记为 PV。
3基于 D-S-CNN 的农田多传感器/视觉信息融合导航模型
3.1基于 D-S-CNN 的多传感器信息融合算法
CNN 具有良好的容错能力、并行处理能力和自学习能力,运行速度快、自适应性能好,且具有较高的分辨率,可以用于多传感器导航信息融合,提高定位精度。但是由于大田复杂的小气象环境和偏僻的地理位置,以及农田恶劣的作业环境,田中 GPS、惯性导航以及视觉导航可能会出现短时间单个甚至多个失效的现象,从而导致导航模型输出结果误差较大,鲁棒性差。同时,D-S (dempster/shafer)证据理论能够较好地鉴别信息的可信度。因此,本文提出一种基于 D-S-CNN 的多传感器信息融合算法,通过 D-S 证据理论同步分析多个传感器实时可信度,减小训练模型中误差数据输入,再利用 CNN 结合实时可信度进行多传感器信息融合,从而提升导航系统的准确性和鲁棒性,具体结构如图3所示。
其中,融合结构分为两级,第一级功能为基于证据理论信息融合,将三种传感器采集的拖拉机位置信息作为证据,经过证据理论综合产生决策信息,输出判决结果矩阵 KC。第二级功能为将三种传感器的拖拉机位置信息及决策结果矩阵 KC 输入 CNN 神经网络进行信息融合建模,具体过程为:
1)采集传感器信息,并进行相应预处理,得到 GPS 数据记为 PG,惯性导航数据记为 PI,视觉导航数据记为 PV;
2)将传感器数据进行归一化处理后作为证据,用证据组合规则进行证据组合,产生新的信任函数矩阵,记为 KC 。具体步骤如下:
①基本信任分配函数:定义集合 E,E 为集合 D 的子集,G 为2D上的基本信任分配函数(mass 函数),G(A)表示对 E 的信度程度大小。G:2?→[0,1],则函数 G 满足:
中全部元素的基本概率之和为1
②合成规则:G1,G2,G3是2?上三个概率分配函数,其正交和 G=G1+G2+G3定义为:G (?)=0, E =?;
其中信任函数矩阵 KC 的取值为?3={0, 1},矩阵中1表示传感器判决为有效,0表示判决为无效。
3)将 PG,PI,PV,KC 作为输入,离线训练 CNN 神经网络,其中训练集1000个,测试集392个;
①CNN 卷积层计算过程如下:
式中:
第 n 层第 j 个节点的计算结果;
激活函数;
第 n 层第j个输出特征图所对应的多个输入特征图的索引集合;
偏置项,所有输入特征图共用这一个偏置项;
卷积核。
②池化层为特征映射层,每个池化层由多个特征映射组成,每个特征映射为一个平面,平面上所有神经元的权值相等。经过池化层,可降低特征的维数,也可防止过拟合。池化层的计算过程如下:
式中:down(·)——下采样函数;
βj(n)——乘性偏置。
4)利用训练好的神经网络进行传感器信息的综合,求出神经网络的输出拖拉机的位姿信息 P*。
3.2基于 D-S-CNN 的多传感器组合导航算法
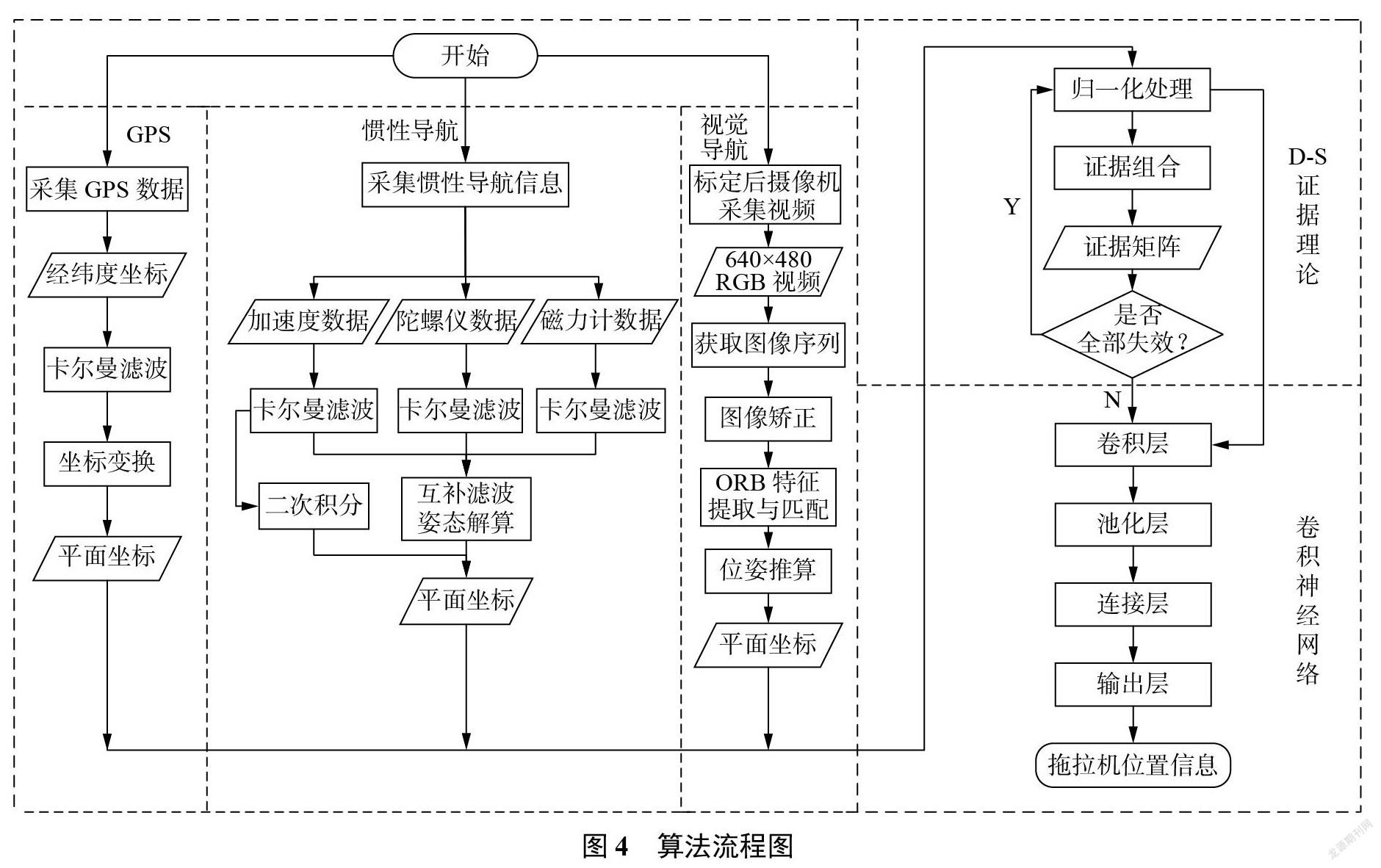
基于农田环境复杂,本文提出一种基于 D-S- CNN 的多传感器组合导航算法,该算法能够有效结合三种导航传感单元,增强导航精度以及抗干扰性。该算法首先同时运行 GPS 定位算法、惯性导航算法以及视觉导航算法,分别获取三种导航的实时导航坐标。而后将三种方法的平面坐标同步输入 D-S 证据理论网络中,获取三种算法的实时可靠概率,经诊断来确定是否将数据输入 CNN 网络。最后在 CNN 网络中,结合每种数据的实时可靠概率来进行信息融合,得到拖拉机的准确位置信息。基于多传感器信息融合导航的算法总流程如图4所示。
4实验结果与分析
实验在南京农业大学浦口校区试验场进行,场地内部路面平坦,周围存在有一些树木,实验采用白粉画线设置预期路径,如图5所示。周围树荫遮挡可能会造成 GNSS 信号丢失,同时烈日强光偶尔也会造成摄像头信息失效,接近大田实际环境。实验过程中使用华硕 X555L 笔记本电脑,操作系统 Windows7,电脑64位、处理器为 Core(TM)i5双核2.4 GHz、系统内存为4 GB,软件基于Matlab R2017b 编写。
由于环境因素的影响,会造成单个甚至多个传感器短时失效的情况。通过对比不同分类算法在无传感器失效时、单个传感器失效、两个传感器失效的导航精度,建立最优的信息融合导航模型,分别如图6~图8所示。
实验结果对比分析如下:
1)基于 BP、CNN 信息融合的导航结果如图6所示。基于 CNN 信息融合导航精度为4 cm,基于 BP 信息融合导航精度为10 cm,因此,CNN 信息融合导航模型优于 BP 信息融合导航模型。
2)由于环境因素的影响,会造成单个传感器短时失效的情况。单个传感器失效时基于 CNN、D-S- CNN 信息融合的导航结果如图7所示,基于 CNN 信息融合导航精度为89 cm,基于 D-S-CNN(其 D-S 证据信任函数矩阵为[1,1,0]/[1,0,1]/[0,1,1])信息融合导航精度为10 cm,因此,在单个传感器失效时基于 D-S-CNN 信息融合的导航仍然具有较好的预测精度。
3)在两个传感器失效时,基于 D-S-CNN 融合导航结果如图8所示,其 D-S 证据信任函数矩阵分别为[0,1,0]/[1,0,0]/[0,0,1]。由于 D-S 证据可有效地判別出失效的传感器信息,并将信任函数矩阵及三种传感器的位置、姿态信息作为 CNN 输入,由图8(a)可见,当 GPS 和视觉导航失效时,误差较大,无法满足导航作业需求,但这种情况几率较小,除此情况外,如图8(b)、(c)所示,D-S-CNN 均可实现较高的导航精度。
不同条件下,不同传感器信息融合模型的导航定位精度如表2所示,在大尺度上的定位采用低成本的 GPS 定位方式,其定位精度在5 m 左右,再结合惯性导航将信息融合可将精度提高至分米级。在此基础上再结合机器视觉,通过神经网络进行信息融合可以实现厘米级的田间精确定位导航,基于 D- S-CNN 的农田多传感器/视觉信息融合导航方法的导航精度可达4 cm,且在气象、光照、地形变化等复杂的环境下均具有较强的鲁棒性。在实际使用中,传感器发生失效主要因为环境干扰,而由于农机的移动,传感器的失效为短时失效,且发生两个传感器同时失效的概率较低,本文所提的 D-S-CNN 的农田多传感器信息融合导航方法可通过 D-S 证据信任函数动态判断传感器信息的有效性,选择有效信息输入 CNN,实现农机高精度、可靠导航。
5结束语
针对现有田间农机高精度卫星导航成本高且受气象环境影响较大、惯性器件积分运算使导航误差迅速积累、视觉导航受限于田间光照突变等问题,本文提出一种基于 D-S-CNN 的农田多传感器信息融合导航方法,其中视觉导航采用基于 Haugh-PT- ORB 的视觉导航算法,在此基础上,采用 D-S 证据理论进行传感器失效检验,将三种传感器的位置、姿态信息以及 D-S 证据信任函数矩阵输入 CNN 神经网络进行信息融合,通过1000个训练集建立基于 D-S-CNN 的农田多传感器信息融合导航模型,通过392个测试集进行验证给出优化模型,该模型在无传感器失效情况下定位精度为4 cm,单个传感器失效情况下定位精度为10 cm。在实际环境中,由于树荫遮挡、强光照射等环境因素影响,其在无传感器失效情况下定位精度为6 cm,单个传感器失效情况下定位精度为13 cm。采用 D-S 证据信任函数矩阵的农田多信息融合的田间导航方法,可有效避免单个传感器失效引起的大误差。文献[14-16]提出了几种适用于不同农田状况下的田间智能导航方法,与上述已有方法相比,本文导航硬件成本低、精度高,鲁棒性好,可适用于复杂环境农田环境下农机的高可靠精确导航作业。本文研究表明,基于D-S-CNN 的农田多传感器信息融合导航方法能满足农田树荫遮挡、强光照射等复杂情况下的高精度、低成本导航作业需求。
参考文献
[1]庄春华, 赵治华, 张益青, 等. 卫星导航定位技术综述[J]. 导航定位学报, 2014, 2(1): 34-40.
[2]ROHANI M, GINGRAS D, GRUYER D. A novel approachfor improved vehicular positioning using cooperative mapmatching and dynamic base station DGPS concept[J]. IEEETransactions on Intelligent Transportation Systems, 2016,17(1): 230-239.
[3]LIU J, YUAN J, CAI J, et al. Autopilot system of agriculturalvehicles based on GPS/INS and steer-by-wire[J].Transactions of the Chinese Society of AgriculturalEngineering, 2016, 32(1): 46-53.
[4]胡炼, 殷延勃, 杜攀, 等. 水稻田激光平地技术研究与展望[J]. 中国稻米, 2020, 26(5): 16-18.
[5]郭成洋, 张硕, 赵健, 等. 基于 RTK-BDS 的果园农用车辆自主导航系统研究[J]. 农机化研究, 2020, 42(8): 254-259.
[6]齐乃新 , 张胜修 , 曹立佳 , 等 . 基于辅助匹配的 1 点RANSAC 单目视觉导航算法[J]. 系统工程与电子技术,2018, 40(5): 1109-1117.
[7]张青春, 王旺, 杨广栋. 基于多目立体视觉的机械臂智能控制系统设计[J]. 中国测试, 2020, 46(12): 79-85.
[8]BENGOCHEA-GUEVARA J M, CONESA-MU?OZ J,AND?JAR D, et al. Merge fuzzy visual servoing and GPSbased planning to obtain a proper navigation behavior for asmall crop-inspection robot[J]. Sensors, 2016, 16(3): 276.
[9]郭利强. 在无人车辆中激光雷达的关键技术及应用研究[J].科学技术创新, 2020, 35(1): 72-73.
[10]王中立, 牛颖. 基于多传感器信息融合的机器人障碍物检测[J]. 中国测试, 2017, 43(8): 80-85.
[11]ZAIDNER G, SHAPIRO A. A novel data fusion algorithm forlow-cost localisation and navigation of autonomous vineyardsprayer robots[J]. Biosystems Engineering, 2016, 146: 133-148.
[12]张铁民, 李辉辉, 陈大为, 等. 多源传感器信息融合的农用小车路径跟踪导航系统[J]. 农业机械学报, 2015, 46(3): 37-42.
[13]黄钰平. 基于卡尔曼滤波的组合导航系统 [C]//第九届中国卫星导航学术年会论文集——S02 导航与位置服务. 中国卫星导航系统管理办公室学术交流中心, 2018: 118-122.
[14]张京, 陈度, 王书茂, 等. 农机 INS/GNSS 组合导航系统航向信息融合方法[J]. 农业机械学报, 2015, 46(S1): 1-7.
[15]黎永键, 赵祚喜, 高俊文, 等. 基于 DGPS 定位与双闭环转向控制的农业自动导航系统[J]. 农业现代化研究, 2016,37(2): 387-394.
[16]韩振浩, 李佳, 苑严伟, 等. 基于 U-Net 网络的果园视觉导航路径识别方法[J]. 农业机械学报, 2021, 52(1): 30-39.
[17]張晓寒, 赵景波, 董振振. 农机 BDS/INS 组合导航算法研究[J]. 中国农机化学报, 2021, 42(2): 171-177.
(编辑:谭玉龙)
