基于光栅图像识别的目标定位优化方法研究
2021-09-13马海蓉丁飞章华涛张海涛庄衡衡张登银
马海蓉 丁飞 章华涛 张海涛 庄衡衡 张登银

摘要:高精度光柵测量系统和光谱识别定标对于大口径空间天文望远镜观测至关重要,将图像的智能识别与光栅测量系统相结合,可以解决传统光栅测试过程中目标识别困难和特征难以提取的问题。由于目标光源点光谱成像的特点以及背景噪声的干扰,图像目标的自动识别和位置提取精度受限。该文设计并构建基于观测图像识别的光栅测试分析系统,利用光栅的分光特性,结合图像传感器进行光电转换和特征识别,通过分析目标光栅图像的关键特征,利用图像预处理算法对光栅图像进行反色和模糊去噪,获得更清晰的光斑特征,通过密度质心法提取光斑中心,再由高斯曲面拟合提取光栅图像的目标中心和像素分布特征。实验结果表明,相比传统密度质心法,该文方法能够准确提取光栅图像中多目标的中心,像素幅值识别精度提升1个像素以上。
关键词:光栅测试;图像识别;密度质心法;高斯曲面拟合
中图分类号: TP391.4文献标志码: A文章编号:1674–5124(2021)12–0029–05
Research on optimization method of target location based on raster image recognition
MA Hairong1,2,DING Fei1,2,ZHANG Huatao3,4,ZHANG Haitao1,2,ZHUANG Hengheng1,2,ZHANG Dengyin1,2
(1. Jiangsu Key Laboratory of Broadband Wireless Communication and Internet of Things, Nanjing University of Postsand Telecommunications, Nanjing 210003, China;2. School of Internet of Things, Nanjing University of Posts andTelecommunications, Nanjing 210003, China;3. Nanjing Institute of Astronomical Optics &Technology,NationalAstronomical Observatories, CAS, Nanjing 210042, China;4. Key Laboratory of Astronomical Optics & Technology,CAS, Nanjing 210042, China)
Abstract: High-precision raster measurement system and spectral recognition calibration are essential for large- aperture space telescope observations. Combining intelligent image recognition with the raster measurement system can solve the problem of difficulty in target recognition and feature extraction in the traditionalraster process. Due to the characteristics of spectral imaging of target light source points and the interference ofbackground noise, the accuracy of automatic identification and location extraction of image targets is limited.This paper designs and constructs araster test and analysis system based on observation image recognition. It usesthespectralcharacteristicsof therasterandcombinestheimagesensortoperformphotoelectric conversionandfeature recognition. Byanalyzing the keyfeaturesof the targetgratingimage, theimage preprocessing algorithm is used to perform the raster image. Reverse color and blur and denoise to obtain a clearer spot feature. The spot center is extracted by the density centroid method, and then the target center and pixel distribution characteristics of the raster image are extracted by Gaussian surface fitting. Experimental results show that compared with the traditional density centroid method, this method can accurately extract the center of multiple targets in the raster image, and the pixel amplitude recognition accuracy is improved by more than 1 pixel.
Keywords: raster test; image recognition; density centroid method; Gaussian surface fitting
0引言
光栅是一种把入射光束的振幅、相位或两者同时加上一个周期性的空间调制的光学装置,具有抗干扰性强、体积小、耐腐蚀等突出优点[1]。光的波动性引起的衍射现象最早由意大利的弗朗西斯科·格里马第发现[2]。光栅测量系统常用于激光光源波段特性分析,如波长测量和光栅常数测量等,其基本原理是光源透过光栅发生色散,投影到图像传感器上实现成像,再对采集到的光栅图像进行图像识别[3]。
图像传感器是将光信号转换为电信号的装置,选择一款合适的图像传感器来将光栅分出的光进行光电转换是非常重要的[4]。CMOS 图像传感器采用了 CMOS 工艺,可将图像采集单元和信号处理单元集成到同一块芯片上,完成复杂的光电信号处理功能。随着CMOS 工艺的不断发展,CMOS 图像传感器的性能也在不断提高[5]。
在图像识别技术方面,目前已有多种光斑中心的亚像素提取方法,常用的有中心法、质心法、拟合法等单一方法,也有共同使用几种单一方法的组合方法,如互相关和高斯曲面拟合相结合的方法[6]。王敏等[7]提出,质心法可以看成是以灰度为权值的加权方法,只有灰度分布对称的目标才能获得理想的效果。原玉磊等[8]提出,由于光学成像带来的离轴星像具有非对称性,因此使用质心法计算单个星像的位置中心精度难以获得很大提高。拟合法主要有多项式拟合、高斯曲面拟合和椭圆拟合等。冯新星等[9]提出利用高斯曲面拟合法进行星图分析,利用高斯函数模拟成像过程的点扩展函数 PSF( Point Spread Function )[10],從而进行目标中心定位,该方法可以获得较精确的目标中心位置,同时具有较高的稳定性。
传统算法在检测速度、抗干扰性和精度上各自都存在一定的不足。例如经典的质心法适用于光斑形状规则和灰度比较均匀等场景下的特征识别,否则识别出的光斑中心会与实际位置存在一定的误差。由于目标光源点光谱成像的特点以及背景噪声干扰,造成了目标光斑中心存在偏离的情况。在本文介绍的 CMOS 光栅系统中,由于 CMOS 相机拍摄的光栅图像存在底噪,图像中的光斑灰度分布函数可近似看作高斯分布,为了更好的增强光栅图像中的光斑特征并获取较为精准的光斑位置,采用密度质心法和高斯曲面拟合组合的图像识别方法。首先通过密度质心法进行图像预处理,然后采用高斯曲面拟合的方法提取光栅图像中的单个或多个目标的中心,从而为光源特性分析奠定良好基础。
1光栅测试分析系统设计
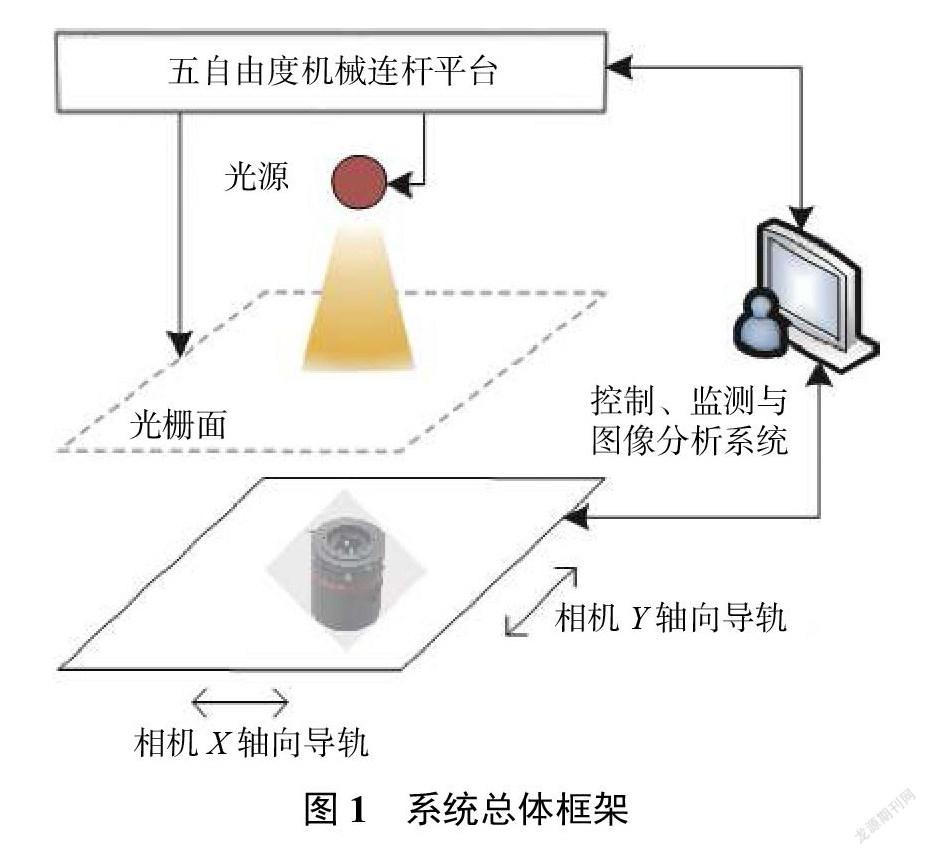
本文提出的基于观测图像识别的光栅测试分析系统包括4个功能模块,分别是:五自由度机械连杆平台、光源、光栅面、CMOS 相机,系统组成如图1所示。
光源、光栅面和 CMOS 相机三者的空间位姿由五自由度机械连杆平台和相机导轨进行协同控制,从而对三者之间的空间姿态关系进行微调及标定。五自由度机械连杆平台将光源驱动至预定空间点位,光源发射的多波段光线经光栅面折射,将在 CMOS 相机拍摄的图像中产生光斑特征。通过对光斑图像进行处理,提取光斑图像中的光斑特征,从而为光源的多波段特性分析奠定基础。
如图2所示,从功能逻辑来看,基于观测图像识别的光栅测试分析系统分为控制层和分析层,控制层负责光源预定点位的驱动、光栅面的控制以及 CMOS 相机的配置与拍摄控制等;分析层负责 CMOS 光斑图像的处理、特征识别及光斑的中心定位优化分析等。图中五自由度机械连杆平台为独立系统,生成的控制策略用于获取光栅面 X 轴向参数,关于五自由度机械连杆平台的功能不做具体描述。
系统控制功能模块及业务流程如下:
1)设置光源的初始位置,通过五自由度组合电机的正向和逆向运动进行空间点位驱动,经过空间的转换获取出光源坐标。
2)光栅面 X 轴的轴向控制策略同步于五自由度组合电机的控制策略,即五自由度的控制策略确定了光源的空间点位和光栅面的空间位置。
3)CMOS 相机进行参数配置和标定后,其空间位置由高精密位移台进行驱动。
当光栅测试分析系统的控制部分执行完成后,执行光栅图像分析部分的功能,包括:
1)通过 CMOS 相机采集光源经过光栅面折射的光波,输出CMOS 光栅图像。
2)设计光栅图像识别算法,对图像中的光斑特征进行识别。
2光栅图像识别方法
2.1光栅图像识别框架
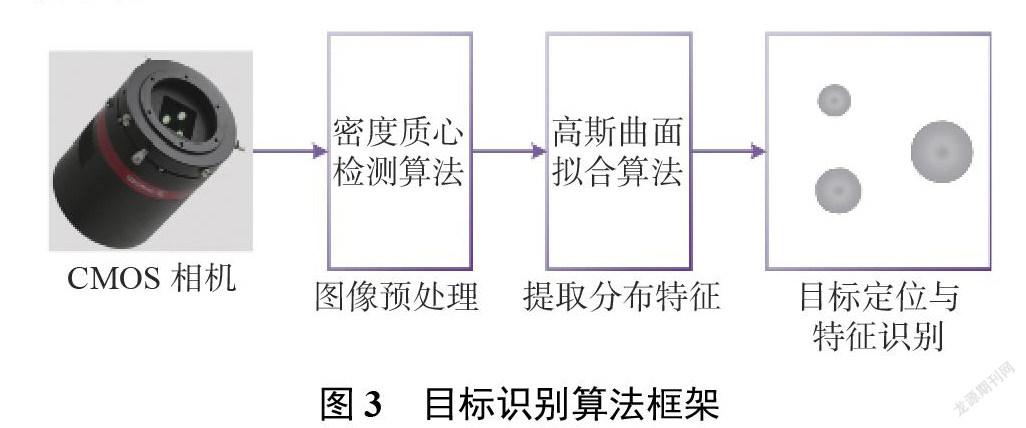
光栅图像目标识别的算法框架如图3所示。考虑到 CMOS 相机拍摄的光栅图像存在底噪,为了获得较优的光斑识别性能,本文采用基于密度质心法[11-13]的图像预处理和高斯曲面拟合[14-16]的组合方法。
首先采用 VS 和 Open CV[17]环境实现基于密度质心法的图像预处理,对光栅原始图像进行灰度化和反色,然后进行模糊去噪,消除图像底噪和不均匀特征,最后进行阈值选择,从而获得更清晰的光斑区域。图像经密度质心法预处理后提取光斑中心区域,通过高斯曲面拟合对特征光斑进行中心提取,并获得光斑的像素分布特征,从而获得光栅图像的增强特征。
2.2光栅图像高斯曲面拟合
采用高斯曲面拟合方法确定光斑的前提是:目标在图像中有较亮的斑点,受传感器的限制、成像特性以及大气的干扰等,成像过程具有 PSF 模糊效应。受 PSF 模糊的影响,目标表现出从中心向四周灰度逐渐降低的弥散效应。
高斯曲面拟合法基本原理[18-19]:高斯曲面拟合法将成像过程的 PSF 使用高斯函数拟合,假定 f (x,y)为图像中位于(x,y)的亮度值,(x0 ,y0)为目标中心,则目标的弥散处的像元亮度为
式中:A——幅值;
x0,y0——理论上的中心坐标;
x,y——成像光斑的位置坐标;
x, y——X方向和Y方向的标准差。
对式(1)两边分别取对数并简化为多项式,即可得到下式:
其中各参数对应关系为:
通过最小二乘法求解,使残差的平方和系数最小,取残差为":
根据最小二乘法原理,a,b,c,d,e可由下式确定:
从而可求出高斯函数的各项参数,获得高斯曲面的极值点,该极值点即可看成成像光斑的中心位置。
3 系统实验与分析
本系统通过光栅图像预处理算法对光栅原始图像进行矩阵化,通过反色和模糊去噪处理获得清晰的光斑区域。为了更好地呈现图中的连续光斑点,在图像处理环节剔除了零极点光斑。在此基础上,通过中值滤波去噪[20-22]、密度质心法分别提取光栅图像的光斑特征,识别对比结果如图 4 所示,其中图 4(a) 是原始局部图像,图 4(b) 和 4(c) 分别是中值滤波去噪和密度质心法特征提取效果图,可以看出,密度质心法的光斑中心提取性能优于中值滤波去噪方法。进一步,通过高斯曲面拟合获取光斑中心和像素分布,识别结果如图4(d)所示,其中光斑中的黑色小方块是密度质心法获得的光斑中心,红色五角星是高斯曲面拟合获得的光斑中心,从图中可看出,由于光斑的非规则特征(即非标准圆形),密度质心法和高斯曲面拟合法获得的光斑中心位置不重合。
下面对光栅图像的单光斑场景进行进一步对比,基于密度质心检测法和高斯曲面拟合检测法分别提取光斑的特征,二者对单个光斑的二维和三维特征识别结果分别如图5所示。从图5(b)中标注可以看出,密度质心法和高斯曲面拟合提取的光斑中心不重合,并且高斯曲面拟合可以更准确表达光斑的像素分布特征,其获得的光斑中心位置更能准确的反映识别效果。
为了验证本文算法的精度,选用图4(d)中12个光斑来进行密度质心法和高斯曲面拟合的数据检测,并计算出两种不同方案获得的光斑中心结果的误差,如图6所示。可以看出,各个光斑在 X 轴向的识别误差为蓝色实线与虚线之间的偏离距离,各个光斑在 Y 轴向的识别误差为小圆圈和叉号之间的偏离距离。本文方法可以将识别精度提升至少1个像素以上。
4结束语
在本文介绍的基于观测图像识别的光栅检测分析系统中,首先采用密度质心法对 CMOS 相机图像进行灰度化、反色和模糊去噪等预处理,增强光斑特征,其次通过高斯曲面拟合方法提取光斑中心。实验结果证明,与中值滤波去噪方法相比,经过密度质心法进行预处理后的光斑特征更加明显;由于光斑的非规则特征,相比于传统密度质心法,高斯曲面拟合法提取光斑中心位置结果更加精准,同时还可以获得光斑像素的分布特征。现有研究成果为下一步光源特性的进一步分析及天文观测系统建设奠定了良好基础,在光栅测试系统中的光栅常数测量、系统误差校准等方面研究都能够有广泛的应用,也可以为衍射和散斑测量、光谱分析等光电测试系统研究提供有价值的参考。
参考文献
[1]马游春, 马子光, 苏庆庆, 等.基于光栅传感器的空间靶标定位技术研究[J].中国测试, 2019, 45(6):109-113.
[2] HALLAR. Beyondthefringe: diffractionasseenbyGrimaldi, Fabri, Hooke and Newton[J]. Notes and Records of the Royal Society of London (1938-1996), 1990, 44(1):13-23.
[3]于海, 万秋华, 孙莹, 等.一种自适应安装的高精度图像式角位移测量装置[J].中国光学, 2020, 13(3):510-516.
[4] ElGAMALA,ELTOUKHYH. CMOSimagesensors [J].Circuits& Devices Magazine IEEE, 2005, 21(3):6-20.
[5]姚立斌.低照度 CMOS 圖像传感器技术[J].红外技术,2013, 35(3):125-132.
[6]连月勇, 张超, 谢宗特.星点亚像元细分定位精度分析[J].测绘科学技术学报, 2015, 32(6):578-582.
[7]王敏, 赵金宇, 陈涛.基于各向异性高斯曲面拟合的星点质心提取算法[J].光学学报, 2017, 37(5):218-227.
[8]原玉磊, 郑勇, 杜兰.星点中心高精度质心定位算法[J].测绘科学技术学报, 2012, 29(2):122-126.
[9]冯新星, 张丽艳, 叶南, 等.二维高斯分布光斑中心快速提取算法研究[J].光学学报, 2012(5):70-77.
[10]贾瑞明, 马晓蕾, 郝云彩.基于偏正态分布的星点细分定位方法研究[J].激光与光电子学进展, 2016, 53(5):140-147.
[11]张小艳, 王晓强,, .白福忠等基于改进灰度重心法的光带中心提取算法[J].激光与红外, 2016, 46(5):622-626.[12]唐冠群.几种激光光斑中心定位算法的比较[J].北京机械工业学院学报, 2009, 24(1):61-64.
[13]周中亮, 周冰,何永强, 等.成像型激光探测系统中光斑精确定位方法研究[J].激光技术, 2008(3):248-251.
[14]范新坤, 张磊, 佟首峰, 等.一种改进的相机灵敏度测试系统[J].中国测试, 2017, 43(6):65-69.
[15] ANTHONY S M, GRANICK S. Image analysis with rapid and accuratetwo-dimensionalGaussianfitting[J]. Langmuir:the ACS journal of surfaces and colloids, 2009, 25-.(14):815260
[16] WAN X, WANG G, WEI X, et al. Star centroiding based on fastgaussianfittingforstarsensors [J]. Sensors (Basel, land)Switzer, 2018, 18(9):2836.
[17]秦小文, 温志芳, 乔维维.基于 OpenCV 的图像处理[J].电子测试, 2011(7):39-41.
[18]李为民, 俞巧云, 胡红专, 等.光点定位中的曲面拟合迭代算法[J].光学技术, 2004(1):33-35.
[19]王丽丽, 胡中文, 季杭馨.基于高斯拟合的激光光斑中心定位算法[J].应用光学, 2012, 33(5):985-990.
[20]曹远佳, 尉广军, 李先龙.激光光斑的图像处理及边缘检测的改进[J].激光与红外, 2016, 46(9):1160-1164.
[21] SINGHKM,BORAP. Adaptivevectormedianfilterfor removalofimpulsenoisefromcolorimages[J]. Istanbul University- Journalof Electrical & Electronics Engineering,2011(1):1063-1072.
[22]张爱玲, 李鹏, 刘晟.基于粒子群算法的图像椒盐噪声去除算法[J].计算机科学, 2017, 44(8):301-305.
(编辑:刘杨)
