人工智能系统故障分析原理研究
2021-09-11崔铁军李莎莎
崔铁军,李莎莎
(1.辽宁工程技术大学 安全科学与工程学院,辽宁 葫芦岛 125105;2.辽宁工程技术大学 工商管理学院,辽宁葫芦岛 125105)
随着科技水平的进步,未来系统必将是无人化、智能化、信息化和数据化的复杂系统。人们设计系统必须解决两个问题:1)系统的功能性,2)系统的可靠性。它们都将导致系统故障[1-2]。系统的功能性是系统必须达到设计的功能和目的。现在设计制造系统都能达到这种要求,即实现系统功能性是相对简单的,技术是成熟的。系统可靠性指系统在规定条件下和规定时间内完成预定功能的能力。可靠性强调系统在完成功能的前提下保持功能的稳定性。例如:系统可以完成一项工作,但该类系统中每个实例系统完成该工作的能力不同。在技术不足时系统对功能性的要求一般大于可靠性;而在技术成熟后对可靠性要求大于功能性。而且一般可靠性和功能性难以兼得。例如,某型坦克的炮管规定发射2 000 发炮弹后必须更换。但实际情况可能发生3 000 发后仍可继续发射,但这时极有可能发生炸膛。因此必须在炮管可靠性较高时停止使用,以保证其可靠性,但牺牲了它的功能性。这种情况对简单系统分析是容易的,但对具有复杂特征的系统而言很困难。
这些困难当然与系统的复杂性有关,但更为重要的是方法论的天然缺陷。由于伴随着人类发展而建立的科学体系之前面对的系统都是较为简单的,进而形成了机械唯物主义科学观,即机械还原方法论。认为系统可不加限制地进行拆分,再研究拆分得到的子系统的功能性和可靠性,最终通过系统与子系统的结构关系叠加子系统功能性和可靠性,得到系统的功能性和可靠性。这种思路广泛应用于系统功能设计过程和可靠性分析过程,但忽略了子系统之间的相互作用,造成系统功能性和可靠性降低。特别是,复杂系统基于机械还原方法论将导致严重且频繁的系统故障。因此,对于具有无人化、智能化、信息化和数据化的复杂系统,其系统故障分析必须克服上述问题。
系统故障的智能化分析在一定程度上可解决该问题。这方面最新的国内研究包括:天文望远镜智能故障辅助诊断[3],使用强化学习的电力通信网故障恢复[4],智能变电站二次设备故障诊断[5],地铁车辆智能故障监测系统[6],多尺度熵滚动轴承故障可拓智能识别[7],高速公路机电设备智能维护[8],安全科学的故障信息转换[9],人工智能电网调控[10],继电保护智能运行管控[11],汽车发动机运行故障智能诊断[12]。国外也有大量研究,包括:机器学习与人工智能在复杂制造系统故障预测中的应用[13],分散群智能空调系统传感器故障检测[14],深度学习散热器智能故障诊断[15],轴承故障分类特征提取方法[16],基于RPVM 和神经网络的异步电动机转子断条检测[17],高速铁路故障诊断[18],风力发电机组先进人工智能保护技术[19],水轮机智能故障诊断[20]。虽然这些研究在相关领域取得了成果,但仍未摆脱方法论的本质问题。
目前人工智能研究主要有三大流派[21-24]。结构主义流派,认为信息与智能是人脑结构决定的,将人对信息的处理和智能行为归结于人脑结构,例如神经网络模型。功能主义流派,认为只需要在功能层面上对信息和智能进行处理,如专家系统。行为流派,通过感知客体的运行和行为来模拟智能行为。它们实质是对人工智能在三个角度的诠释,不同角度理解不同。人工智能应该是脑的结构、功能和行为的统一,而不是相互割裂,甚至对立的。这也是目前智能科学发展中使用机械还原论造成的结果。
综上,将以系统故障分析为主线,利用钟义信教授提出的信息生态方法论作为智能分析方法论,讨论人工智能系统故障分析原理。进而规避分而治之的机械还原方法论对系统故障分析带来的问题。最终保障系统的功能性和可靠性,使系统安全运行。
1 系统故障的智能分析思路
随着科技进步和人类发展,人造系统势必将代替人的大部分功能。系统在完成这些功能的同时需要面对另一个重要问题,即完成这些功能的可靠性,或者说是否有阻碍完成这些功能的事件,即系统故障。在未来系统必将拥有高度的人工智能,那么如何满足系统正常实现功能,预测、预防、控制和恢复系统故障是必须提前考虑的问题。
为研究该问题,将研究对象划分为人系统、功能系统、人工智能系统故障分析系统及环境系统。人系统指正常的自然人。功能系统是人设计的,完成预定目的的系统。人工智能系统故障分析系统指人设计的,帮助人分析功能系统故障的,具有人工智能特征的,能代替人的系统,简称智能系统。环境系统指人系统、功能系统、智能系统所在的环境的总和。以智能系统为核心研究对象,论述人工智能系统故障的分析原理。
传统的且现在主流的方法论是机械还原方法论,是一种机械唯物科学观。认为复杂系统拆分后所得子系统的功能之和与原系统相同。认为个体与个体,个体与主体相互独立,具有封闭性和确定性。但系统故障分析显然不这么简单。美国科学院院士,系统安全知名专家南希·莱文森教授[25-26]指出,目前系统故障分析方法得到的系统故障概率远小于实际系统故障发生概率。他给出的原因是:子系统与子系统、子系统与系统之间的相互作用往往是意外的,不知情的。这导致系统设计时完全无法考虑这些联系。即是作者想说明的使用传统机械还原方论研究系统故障情况、演化过程及其结果难以适用的根本原因。这种方法论割裂了子系统之间的联系,相反大多系统故障是子系统之间能量、信息、物质传递错误引起的。而这些错误在机械还原方法论中不能体现。
幸运的是钟义信教授提出了信息生态方法论,其是辩证唯物科学观,认为事物具有普遍联系,个体与个体及主体有着相互作用,是开放的、具有生态演化的方法论。智能系统作为保障功能系统完成功能的控制系统,与其余系统的相互作用是一种普遍存在的联系。智能系统作为主体,客体分为人系统、功能系统和环境系统。这种划分也考虑到安全领域对研究对象的划分,即人(人系统)、机(功能系统)、环(环境系统)和管(智能系统)。未来复杂系统中,智能系统必将成为整个系统的核心,将调解功能系统、环境系统与人系统的关系,如图1 所示。

图1 研究对象系统的划分Fig.1 Division of research object system
文献[9]指出,故障信息转化定律可描述为本体论故障信息—认识论故障信息—故障知识—智能安全策略—智能安全行为。本体论故障信息指客体系统状态及变化的方式,是客体系统本身表现出来的信息,即人系统、自然系统和功能系统给出的信息。认识论故障信息指主体系统能够感知到的客体系统的本体论信息,是主体系统能接收的故障信息,即为智能系统接收的信息。故障知识指认识论故障信息由主体系统进行智能加工、分析和记忆,形成可处理客体系统故障的规则。智能安全策略指主体利用基础故障意识、情感和理智综合决策生成的智能策略,用于指导主体实施带有减少故障目的智能安全行为。智能安全行为指主体根据智能策略对客体实施的带有防止故障目的行为。智能系统要完成上述故障信息转化,必须根据故障控制目标,且具备故障知识的前提下完成。文献[27]给出了人工智能系统通用模型,提出了人工智能系统故障分析原理,如图2 所示。
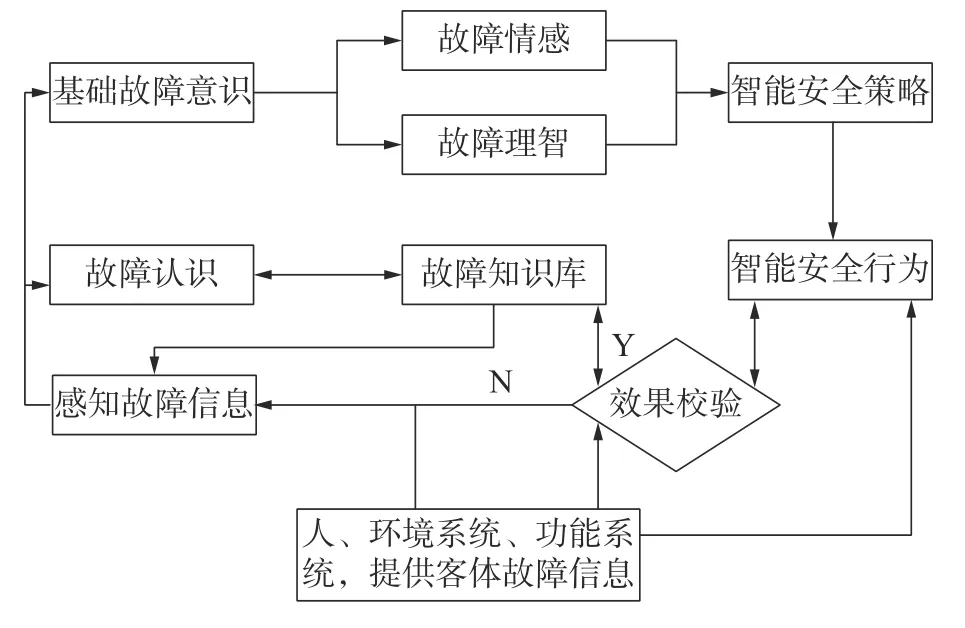
图2 人工智能系统故障分析原理Fig.2 Fault analysis theory of artificial intelligence system
图2 的思路钟义信教授称为信息转化与智能创生[27],本文将其称为故障信息转化与智能故障分析,即故障分析原理。如果运用结构主义(如神经网络)、功能主义(如专家系统)或者行为主义(感知系统)进行故障分析,那么形成的故障分析原理图只是图2 展示流程的一部分[27]。因为上述3 种主义都是机械还原方法论,割裂了子系统之间的关系,得到的故障分析原理图是图2 在某一方面的化简。其结果并不完全,也不能适用于图1 给出的系统结构划分。
因此研究适应未来智能和数据环境下的人工智能系统故障分析原理,只能使用辩证的信息生态方法论。其具备了机械还原论对于各子系统的研究特点,即人系统、功能系统、环境系统、智能系统各自特征;也能够辩证地讨论各子系统之间的相互作用,即能量、信息、物质的相互传递。信息生态方法论满足系统故障分析特点,适合于无人化、智能化、大规模、数据化的系统故障分析。
2 故障信息、故障知识和智能安全生成原理
根据信息生态方法论,系统故障分析所使用的智能系统的任务应为研究故障信息的整体变化过程,即本体论故障信息—认识论故障信息—故障知识—智能安全策略—智能安全行为的过程。进一步可简化为信息—知识—智能[9],对应的3 个主要过程为故障信息生成、故障知识生成和智能安全生成。
2.1 故障信息生成原理
基于第1 节对主体(智能系统)和客体(人系统、功能系统和环境系统)的划分给出定义1、2。
定义1客体故障信息:人系统、功能系统和环境系统状态及其变化过程体现出的信息。
根据文献[28],客体信息包括因素流和数据流。因素流为表征人系统、功能系统和环境系统的所有状态类别的连续状态。数据流是蕴含在因素流中,连续不断的人系统、功能系统和环境系统的各因素状态变化的数据。这两个概念是笔者提出的空间故障树理论的第四部分系统运动空间与系统映射论的研究成果。
系统运动空间认为人建立的人工智能系统是对自然系统(包括人工系统或自然系统)的无限功能接近,但无法达到[28]。期间自然系统与人工智能系统存在着对应关系。自然系统以数据流为先,智能系统接收数据流,进而归类数据确定因素,形成因素流;智能系统改变因素流,进而对自然系统进行控制。由于科技水平的限制,智能系统无法辨识所有的数据流,现有手段也无法控制所有的因素流,智能系统只能模仿自然系统功能的一部分。因此因素流和数据流可表征客体系统(人系统、功能系统和环境系统)的存在,进而表征系统故障。
定义2感知故障信息:主体(智能系统)能够感知的客体状态及其变化过程中散发出来的因素流和数据流,包括故障信息的形式(语法信息)、内容(语义信息)和效用(语用信息)。
故障信息形式又称为语法信息,包括因素流和数据流,描述故障过程变化和特征;故障信息效用又称为语用信息,描述在具备故障信息形式时对应的故障变化情况;故障信息的内容称为语义信息,代表了故障形式与故障效用的对应关系,即一种映射。文献[28]中类似的研究称为系统映射论,认为系统内部结构是因素流与数据流的对应关系。这种系统内部结构就是系统外部影响与系统目标的对应关系,对应于这里的语义信息。主体对于客体的认识是语法、语义和语用三位一体的认识。故障信息生成过程:客体发散出数据流给主体,主体分辨出因素流,因此主体感知到客体的存在,并由数据流和因素流形成故障信息形式;对应的在此情况下客体表现出主体设定目标的达成情况,形成故障信息效用;故障形式和效用组成了对应关系,形成了故障信息内容,即映射关系。这就生成了一条故障信息。故障信息经过处理将进一步形成常识故障知识、经验故障知识和规范故障知识,加之本能故障知识就建立起了故障知识库。
2.2 故障知识生成原理
将故障信息转化为故障知识即为故障知识的生成原理。故障信息与故障知识是有区别的。故障信息是表面的,是客体变化过程中散发出的因素流和数据流。由于技术限制,故障信息往往是离散的、随机性和模糊性,并伴随着错误信息,是系统故障变化的表象。故障知识是在因素流与数据流基础上得到的对应关系,可表征根本的系统故障变化过程。可对新出现的故障语法信息,在没有语义情况下进行预测和判断与语法对应的语用,从而采取应对措施。从故障信息到故障知识的生成过程主要通过归纳总结完成,形成故障知识后存入故障知识库,如图2 所示。
2.3 智能安全生成原理
智能安全包括智能安全策略和智能安全行为。钟义信[27]指出,智能安全至少包括故障意识、故障情感和故障理智3 个概念层次。它们都涉及知识的获取并做出对应的反应,但不同层级的知识和反应是不同的。
定义 3基础故障意识[9]:根据主体本能故障知识和常识故障知识产生的基础意识反应。
主体对客体故障的认识包括本能故障知识和常识故障知识:本能故障知识是主体自有的,不需要经验积累形成的知识;常识故障知识是通过故障知识反复校验客体系统得到的。则故障意识过程如式(1)所示:

式中:M代表从信息和知识到反应的映射;I代表主体对故障的语义信息;F为因素流;D为数据流;Kic表示本能故障知识和常识故障知识;G表示系统故障最少的目标;Ric表示基础意识反应。
定义 4故障情感:主体根据本能故障知识、常识故障知识和经验故障知识产生情感反应。
经验故障知识可从故障语义信息(它是感知信息/认识论信息的代表)归纳得到。故障情感比基础故障意识利用了更多的经验故障知识,故障情感只在基础故障意识之上才能发生。则故障情感过程如式(2)所示:

式中:Kice表示本能故障知识、常识故障知识和经验故障知识;Rice表示情感反应。
定义 5故障理智:主体根据本能故障知识、常识故障知识、经验故障知识和规范故障知识产生理智反应。
故障理智比基础意识利用了更多的经验故障知识和规范故障知识,故障理智只在基础故障意识之上才能发生。则故障理智过程如式(3)所示:

式中:Kices表示本能故障知识、常识故障知识、经验故障知识和规范故障知识;Rices表示理智反应。
3 4 种故障知识的获得、特性与应用
由于研究的主体是智能系统,它本身是由人设计的,通常情况下独立于人运行的,保证系统正常运行的智能故障分析控制系统。因此对于智能系统而言,使用故障意识、故障情感和故障理智是不恰当的。实际上钟义信教授认为智能应该包括这3 层次。进一步地,它们基于本能故障知识、常识故障知识、经验故障知识和规范故障知识,而智能系统获得这些知识是可行的、合理的。
本能故障知识对智能系统最难理解但确是最易接受的知识。它包含了人对于系统故障过程的最基本观点和看法。人可以将对系统故障的本能语义信息写入智能系统的故障知识库,作为智能系统最基本的反应规则,而不需要进一步处理和推理。由于上述特点,智能系统可利用本能故障知识最为快速地进行故障处理。
经验故障知识往往来源于系统设计者知识的直接写入,而系统运行后则来源于系统运行过程中的故障语义信息收集和写入。经验故障知识往往偏重于个体经验,可体现功能系统在特定条件下独有的故障语义信息,具有排他性。
规范故障知识是经过经验故障知识在同类的不同个体(同类功能系统对应的智能系统)之间传播,并经过智能系统验证、修正、提炼和写入故障知识库的故障语义信息。具有一定范围内的通识性。
常识故障知识是规范故障知识经过长期的、大量同类的不同个体验证,并达成一直且有统一认识的故障语义信息。一旦确定一般不进行修改。
因此这4 种故障知识都可以通过主体(智能系统)对客体(功能系统和环境系统)的学习,或客体(人系统)直接授予主体完成。对实际系统的故障分析、预测和控制,智能系统可根据实际情况(故障信息语法)运用基础故障意识、故障情感和故障理智和4 种故障知识进行应对。
基础故障意识根据故障语义信息利用主体本能故障知识和常识故障知识进行主体反应。首先考虑本能故障知识,其代表了智能系统最基本的趋利避害的原则目标,且本能故障知识相对较少,可直接通过识别以最快的响应速度给客体提供支持。常识故障知识较本能故障知识更多,通过寻找匹配条件完成对客体的支持,更为具体,但效率降低。
故障情感根据本能故障知识、常识故障知识和经验故障知识产生主体情感反应。本能故障知识和常识故障知识的处理与基础故障意识相同。经验故障知识往往是针对同一类故障的经验。由于经验本身具有一定的不确定性,智能系统可能会得到一些可选方案。作为主体的智能系统可根据客体的即时故障语法信息得到故障语义信息并采取行动,这是一种模糊决策过程,当然也可以使用其他方法。
故障理智根据本能故障知识、常识故障知识、经验故障知识和规范故障知识产生主体理智反应。与故障情感的区别在于故障理智拥有规范故障知识。当故障问题在上述层面难以解决,可利用规范故障知识进行逻辑推理获得主体理智反应。当问题更加困难时在规范故障知识基础上运用智能方法加以分析,如深度学习、神经网络等方法。
可见基础故障意识、故障情感和故障理智可处理逐渐复杂的故障问题,但处理效率则是降低的,反应时间变慢。虽然本能故障知识、常识故障知识、规范故障知识和经验故障知识对系统故障语义信息抽象的程度越来越低,但语义信息的数量则是增加的。
智能系统的核心任务是根据故障语义信息提供适合的智能安全行为保障系统完成预定功能。智能安全行为取决于智能安全策略。智能安全策略需要综合考虑基础故障意识、情感与理智。因此最终得到的人工智能系统故障分析原理可表述为基于信息生态方法论,考虑基础故障意识、故障情感与故障理智,及即时故障语义信息的综合安全决策与降低故障反应生成过程,目的是确保系统在规定条件下完成预定功能。
4 结束语
本文研究了利用信息生态方法论对系统故障进行智能分析处理的基本原理,主要结论:
1) 对系统的研究对象进行了划分,针对未来系统特点将智能系统作为研究主体。认为研究适应未来智能和数据环境下的人工智能系统故障分析原理,只能使用辩证的信息生态方法论实现。
2) 结合信息生态方法论和系统运动空间及系统映射论,提出了故障信息、故障知识和智能安全生成原理。它们涉及了本能故障知识、常识故障知识、经验故障知识、规范故障知识、故障语义信息的因素流和数据流,以及系统故障最少的目标。
3) 研究了4 种故障知识的获得和特性,及基础故障意识、故障情感和故障理智的特点和应用。认为人工智能系统故障分析原理是基于信息生态方法论,考虑了基础故障意识、故障情感与故障理智,及故障语义信息的综合安全决策与降低故障反应生成过程,目的是确保系统在规定条件下完成预定功能。
