飞机除冰液加热与喷射系统管路压力模糊控制
2021-09-11原志翔
原志翔
(西安航空职业技术学院,陕西 西安 710089)
除冰液加热与喷射系统是保障飞机冬季航行安全的重要组成部分,而该系统在运行过程中往往伴随着管路压力的变化,对除冰系统的运行安全和加热温度产生一定的影响,这就需要在飞机除冰系统基本原理的基础上对引起管路压力的有关因素进行全面的分析。因此,本次研究通过模糊控制技术来调整除冰系统管路压力,进而实现对管路压力波动的有效控制。
1 飞机除冰液的基本特性
飞机除冰液是飞机除冰系统的热量流动载体,通过外部加热可以快速提升小型锅炉内的压力,进而使除冰液与水充分混合。由于除冰液具有较高的黏度,因此在升高温度的情况下,其黏度系数、阻力系数等液力特性会出现一定的变化,进而改变热系统管路阻力特性,最终表现为管路压力波动,对小型锅炉的安全和加热效果产生负面影响[1-3]。
2 飞机除冰车管路系统概述
2.1 管路布局
飞机除冰系统管路的基本布局如图1所示,在飞机除冰系统的作用下,小型锅炉中的水和除冰液会按照一定比例充分混合,并通过加热装置以混合溶液进行加热处理,同时通过加热升压的方式喷射混合溶液,喷枪自身也可以调节混合溶液的喷射流量。由此可见,飞机除冰系统是管路系统、泵、小型锅炉、储液箱等设备的集成体系[4-6]。
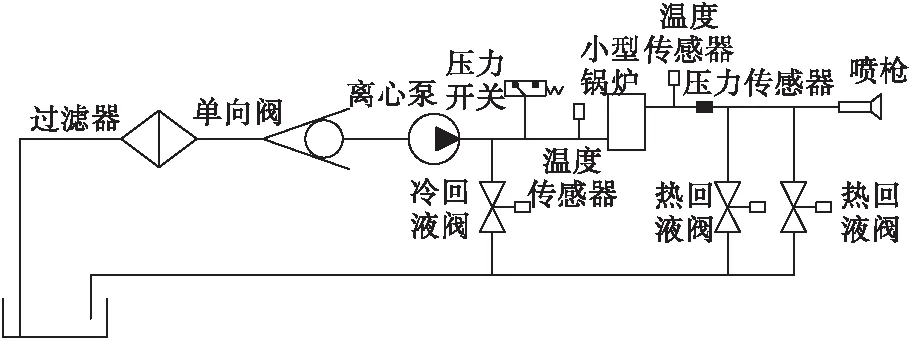
图1 飞机除冰系统管路布局
2.2 管路系统运行模式
在飞机除冰车管路系统的实际应用中,其运行模式可以划分为加热模式、喷射模式和等待模式三种。
1)加热模式
在储液箱温度较低的情况下,系统会对小型锅炉进行预加热处理,同时将热回液阀打开,使除冰液回流至储液箱,进而增加除冰液温度,在除冰液温度提升至5 ℃的情况下停止加热,系统开启等待模式[7-8]。
2)喷射模式
当需要进行除冰操作时,系统将由等待模式转换为喷射模式。喷枪启动后,管路系统会接收到来自喷枪的启动信号,小型锅炉开始运作,热回液阀门自动关闭并喷射除冰液。待结束喷射后,锅炉熄火,喷枪关闭,系统自动将回液阀打开并重新开启等待模式[9]。
3)等待模式
管路系统在进入等待模式的情况下会自动调整喷射位置以准备下一次除冰,水泵继续维持开启状态以提高作业效率,此时热回液阀开启,小型锅炉停止点火,防止锅炉因加热过度而出现气化问题。在完成调整之后喷枪再次开启,进而恢复喷射模式[10-11]。
3 管路压力波动控制
3.1 引起管路压力波动的有关因素
管路系统在加热管路的同时,压力与温度是相互关联、相互耦合的一对参数。小型锅炉升温的过程同时也是压力损失增加的过程。出于一般作业需要的考虑,除冰系统需要依照冰雪状况来对喷枪的水花和流量进行调整。通常情况下,喷枪会在50~23 L/min的流量范围内设置6个挡位,每一次挡位的变化均会使管路系统的压力发生变化。尤其是在管路系统运行模式发生变化的情况下,系统需要切换冷、热回阀,同样会使管路产生压力波动[12-13]。
3.2 控制方案
在喷枪流量发生变化的情况下,管路负载也会发生相应的改变,进而引起水泵工作点波动,出于管路系统压力恒定方面的考虑,还需要在结合系统压力偏差的基础上通过调整变频器来维持合理的系统压力。在小型锅炉管路不断升温的过程中,锅炉在运行状态下的流量与沿程阻力也会发生明显的变化,致使管路系统体现出非线性的压力变化,数学模型的建立难度也相应增加,因此需要基于实验数据为管路压力控制建立模糊控制策略。
4 模糊控制器设计方案
模糊逻辑是模糊控制的核心理论,模糊控制器本质上是一种基于现有知识而建立起来的控制路径,通过语言变量对受控对象的特征加以描述,无需精确的数据指导,能够基于人为设定的控制规则和系统的动态信息输出控制信号,其应用优势主要表现在动态响应快、鲁棒性强、对参数变化不敏感等方面,在结构上主要包括模糊规则、被控对象、输入量化和输出量化等部分,基本原理如图2所示。

图2 模糊控制器基本原理
如图2所示,r为输入变量的给定值;U为输出语言变量(解模糊化后);u为实际控制信号输出值(经输出量化后);e为输入变量的误差;ec为误差的变化率;e与ec在经过输入量化处理后,分别以E和EC为各自的语言变量。
4.1 精确量的模糊化
通过离散化处理的方式将输入量偏差e划分为几个不同的等级。在设计过程中,本次研究分别对于误差e的基本论域、模糊子集论域和语言变量的设定方案如表1所示。

表1 误差e的变量设定方案
对于误差ec的基本论域、模糊子集论域和语言变量的设定方案如表2所示。

表2 误差ec的变量设定方案
对于误差u的基本论域、模糊子集论域和语言变量的设定方案如表3所示。
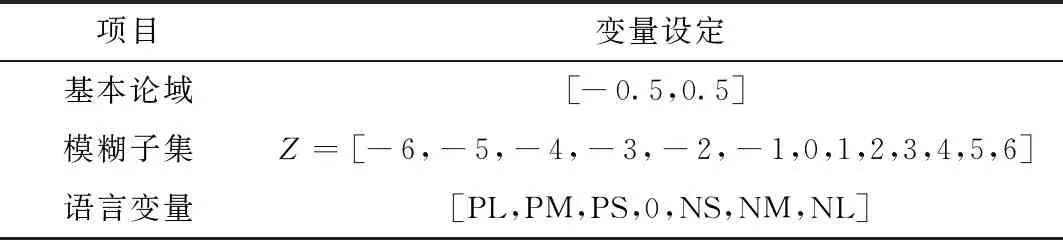
表3 误差u的变量设定方案
出于计算便利性方面的考虑,本次研究通过三角形隶属函数来描述各语言变量模糊子集的隶属度函数。为了进一步提高管路系统压力的响应速度,还需要通过隶属函数曲线的形式来为语言变量E,EC,U赋值。另外,为了降低U语言变量值在零附近的覆盖面积,增强系统的灵敏度和稳态精度,适当地提升了PL与NL的覆盖面积,进而形成如图3所示的语言变量赋值方案。

图3 语言变量E、EC和U的赋值
4.2 模糊规则与推理
为了使模糊控制器达到最佳的静态性能水平,需要在误差较大的情况下及时将误差消除,而在误差较小的情况下,则需要通过对控制量的调整来降低稳态误差。本次研究基于既有的管路压力控制工作经验以及相应的实验观察,总结出以下几项控制规则:
IFE=PL ANDEC=PS THENU=NL
IFE=PL ANDEC=PL OREC=PM THENU=NL
…
在上述规则的基础上,借助模糊集合对语言变量加以转换,进而建立如下所示的模糊关系矩阵:
R=U∪(E×EC)
该模糊关系可用来对模糊控制器的输入、输出特性加以描述,在完成模糊关系的建立工作后,根据模糊合成规则和输入变量的语言值即可生成如表4所示的模糊控制表。

表4 管路压力模糊控制规则表
4.3 建立控制查询表
建立控制查询表,首先要将模糊子集U转换为明确的控制信号,在实际操作中可以通过重心法对模糊控制器所生成的模糊子集加以明确,最终生成模糊控制器查询表,由计算机根据查询表向受控对象发出指令,最终实现对于飞机除冰车管路压力的模糊控制。
