基于EMD和SVM 的机载燃油泵故障诊断研究
2021-09-11陈俊柏刘勇智陈勇聂恺
陈俊柏,刘勇智,陈勇,聂恺
(1.空军工程大学 研究生院,西安 710038; 2.空军工程大学 航空工程学院,西安 710038)
飞机的燃油系统作为重要的机载系统,可以为发动机提供符合需求的燃油。燃油泵作为燃油系统的核心部件,是保证系统正常运行的关键,一旦在飞行中发生故障,将会对飞机运行的稳定性产生重大影响,可能导致坠机等重大安全事故[1]。因此,为提高飞行的安全性与可靠性,必须采取有效措施对燃油泵故障进行准确的诊断和隔离,以保证飞机健康、稳定地运行[2]。
虽然在机载燃油泵上安装有压力传感器,但是并不能实现对压力信号的实时采集,在燃油泵发生故障时,无法提供充足的故障数据。并且,由于缺乏有效的故障诊断方法,在燃油泵发生故障后,一般采取拆解或返厂的方式进行维修,其周期长、代价高,会造成巨大的资源浪费。因此,如何节约成本并有效地提高燃油泵故障诊断效率已经得到了国内外的广泛关注。Muralidharan和Sugumaran[3]利用小波分析提取振动信号的故障特征,并且基于模糊逻辑分类方法实现了燃油泵故障状态的识别;Tian等[4]选取燃油泵的电流信号作为故障特征信号,通过遗传算法优化SVM,实现了燃油泵轴承不同损伤状态的识别;Hancock[5]和Gao[6]等选取燃油泵的压力信号作为故障特征信号,实现了燃油泵的故障诊断;焦晓璇等[7]针对燃油泵故障特征信号单一,无法充分表现故障特征的问题,通过小波包分析对振动信号和压力信号进行了故障特征的提取,并利用基于Adaboost算法的BP神经网络实现了机载燃油泵的故障诊断,提高了多故障模式下燃油泵故障诊断的效率。
针对机载燃油泵振动信号和压力信号非线性、非平稳的特点,文献[3,7]分别通过小波分析和小波包分析的方法对燃油泵故障特征进行了较为准确的提取,但是这2种分析方法均存在信号能量泄露、基函数选择以及不具备适应性的问题。针对机载燃油泵的多故障模式,文献[7]通过BP神经网络对其进行识别,但是神经网络存在对网络参数依赖程度大以及对结果不可解释性强的问题[8]。因此,为解决上述问题,提出了一种基于EMD和SVM的机载燃油泵故障诊断方法。
EMD方法是一种信号分解方法,且具备自适应性。EMD方法基于信号的时间尺度,将信号分解为多个表征其局部特点的固有模态函数(IMF)。并且,IMF的频率特征会随着采集信号的变化而变化[9]。因此,采用EMD方法作为故障特征的提取方法。
SVM是一种适用于小样本的机器学习模型,具备坚实的数学理论基础,对结果具有可解释性。与传统的机器学习相比,SVM 泛化能力更强,不存在维数灾难的问题[10]。机载燃油泵故障分类问题属于小样本、高维模式识别问题。因此,选择SVM作为机载燃油泵故障的分类模型。
由于SVM性能取决于惩罚参数c和径向基函数(RBF)参数g的选择,因此,选择合适的优化算法对两者进行优化是十分必要的。网格搜索(GS)算法是一种传统的参数寻优算法,由于在参数寻优的过程中该算法需要遍历指定范围内所有参数,因此GS搜索速度较慢,且容易陷入局部最优解,不利于保证故障诊断的效率。近些年,各种群智能优化算法被广泛应用于参数寻优,这些算法具备搜索速度较快、精度较高的特点,如粒子群优化(PSO)算法、遗传算法(GA)、樽海鞘群算法(SSA)等。尽管每一种群智能优化算法拥有各自的优势,但是群智能优化算法对具体问题应用环境的依赖性比较大[11],即不同优化算法的性能在具体应用背景下要具体分析。因此,结合采集的机载燃油泵振动信号和压力信号,在相同的研究环境下,采用PSO、GA、SSA优化SVM 参数,并与GS进行对比分析,来确定SVM参数的优化算法,最终实现机载燃油泵故障的高效诊断。
1 EMD及SVM 方法
1.1 EMD方法
EMD可以分解出信号中不同尺度的波动或趋势,产生具有不同特征尺度的IMF,IMF分量满足如下2个条件[12]:
1)IMF的极值点和过零点的个数相同或两者差值不超过1个。
2)局部极小值和局部极大值会产生2条不同的包络线,2条包络线之间所有点的均值都为0。
EMD方法的具体分解步骤如下[13]:
步骤1 确定信号x(t)的所有局部极值点,然后通过3次样条线分别将所有极大值和极小值连成上、下2条不同的包络线。由此,所有的数据点均分布在2条包络线之间。
步骤2 上包络线与下包络线之间的任一点均值记为μ1,求出:

步骤3 如果y1(t)不满足IMF条件,把y1(t)作为原始数据,重复步骤1和2,直到y1(t)满足IMF条件,此时,记y1(t)=c1(t),则c1(t)为信号x(t)的第1个满足IMF条件的分量。
步骤4 将c1(t)从x(t)中分离出来,得到差值信号r1(t),即有

将r1(t)作为原始数据,重复步骤1~3,得到第2个IMF分量c2(t),重复n次,得到n个IMF分量。这样就有式中:rn(t)为残余函数,代表了信号的平均趋势。信号从高频到低频的不同成分用本征模态分量c1(t),c2(t),…,cn(t)表示,不同频段的频率成分随信号x(t)的变化而发生相应的改变。
1.2 SVM 方法
假设有训练样本{(xi,yi)},i=1,2,…,N,训练样本数为N,分类标签y∈{-1,+1},x∈Rm表示m维特征空间。
则超平面为

式中:ω为法向量,决定了超平面的方向;b为位移项,决定了超平面与原点之间的距离。
可以通过求解以下约束优化问题来实现不同类之间的距离最大化,即
对于非线性问题,将特征向量x∈Rm映射到高维欧氏空间,并引入核函数:
式中:λi为拉格朗日乘子。
2 试验数据采集及故障模式
机载燃油转输系统实验平台如图1所示,各部件主要包括:供油箱、储油箱、离心式燃油泵、1个压力传感器(CY-YZ-001)、3个振动加速度传感器(CA-YD-182-10)、数据采集设备(亿恒MI-7008)等,电机壳相互垂直的3个位置安装了振动传感器,如图2所示。压力传感器安装在燃油泵出口处,如图3所示。机载燃油泵工作参数如表1所示。
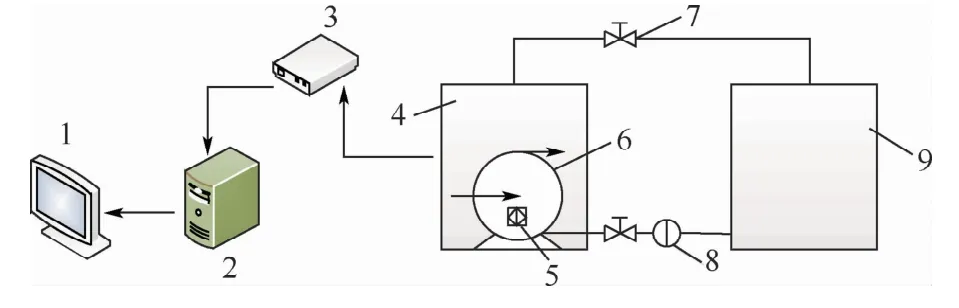
图1 机载燃油转输系统实验平台结构示意图Fig.1 Structureschematicdiagram ofexperimental platform forairbornefueltransfersystem

图2 振动传感器实物图Fig.2 Physicalinstallationofvibrationsensor

表1 产品主要工作参数Table1 Mainworkingparametersofproduct
在测试时,打开阀门,使燃油注入油箱;在油箱中注满燃油后,打开电源,使燃油泵切换至工作状态;当燃油泵运行到稳定阶段后,对油泵的出口压力信号以及振动信号进行采集;采集结束后,断开电源并关闭阀门,使燃油泵逐渐停止工作。由此循环往复,通过更换不同的故障件,获取相应的故障信号。
通过外场维护的实际经验发现,叶片损伤、扩散管损伤、密封圈老化导致的渗漏、轴承磨损等都属于典型故障。实验针对9类典型故障进行故障诊断的研究,分别为:叶片损伤1片、叶片损伤2片、叶片损伤10片、扩散管损伤、叶片损伤10片加扩散管损伤、渗漏、扩散管与叶轮刮蹭、泵口与叶轮刮蹭、轴承磨损0.02mm。
3 故障特征提取
3.1 振动信号特征提取
以叶片损伤1片为例,图4为叶片损伤1片的燃油泵故障振动信号。经EMD处理的振动信号共有10个IMF分量,由于处理后的信号能量主要集中在前几个IMF,因此,图5仅列出了选取的前4个IMF分量的时域特征,并将这4个IMF分量作为故障特征向量的分量。图6表示的是叶片损伤1片4个IMF分量的频域特征。
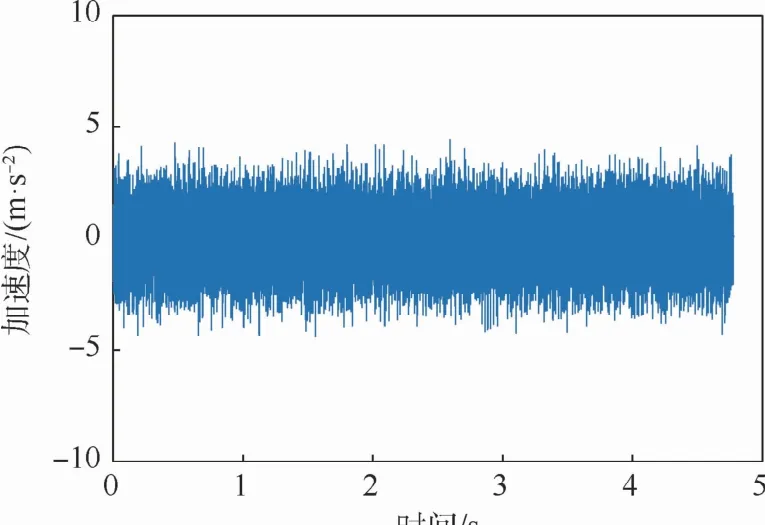
图4 叶片损伤1片振动信号Fig.4 Vibrationsignalwithonedamagedblade
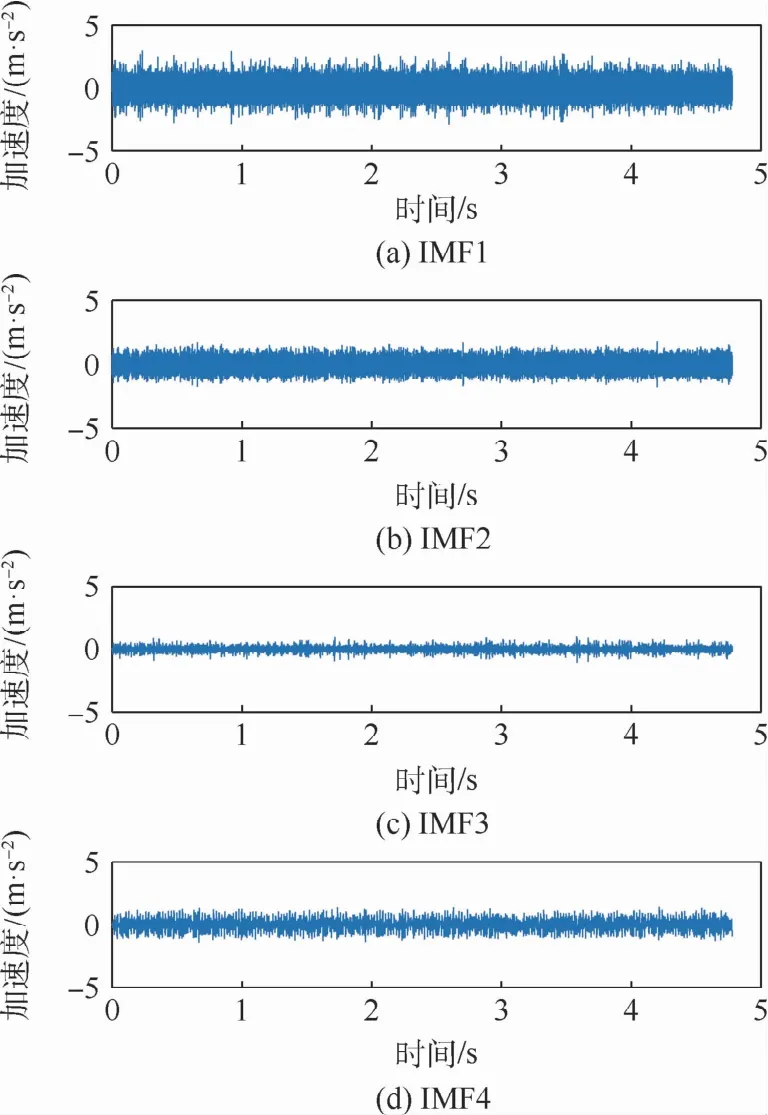
图5 叶片损伤1片EMD分解Fig.5 EMDwithonedamagedblade

图6 叶片损伤1片IMF1~4频域特征Fig.6 Frequency-domainfeaturesofIMF1-4withone damagedblade
重复叶片损伤1片的故障特征提取步骤,可获得叶片损伤2片的4个IMF分量的频域特征,如图7所示。
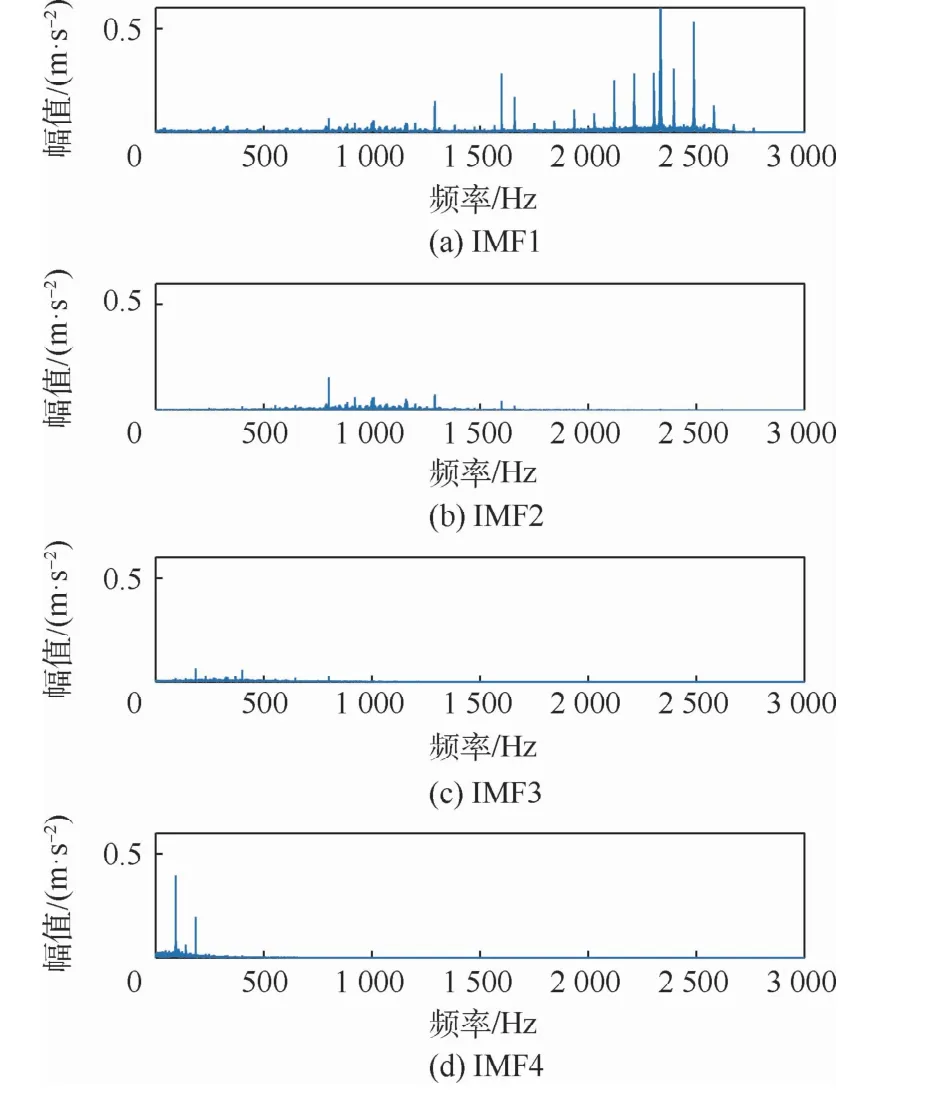
图7 叶片损伤2片IMF1~4频域特征Fig.7 Frequency-domainfeaturesofIMF1-4withtwo damagedblades
经EMD分解后的各IMF分量分别代表了一组特征尺度下的平稳信号,由于各分量对应的不同频带能量(见表2)表征了燃油泵的不同故障模式,因此,各尺度下IMF分量的频带能量可以作为故障特征来识别故障。IMF分量的频带能量通过式(10)计算得出
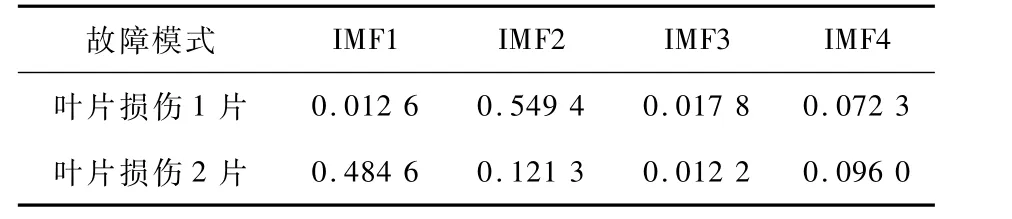
表2 不同故障状态的归一化IMF能量Table2 NormalizedIMFenergyindifferentfaultstates

式中:ω为角频率;X(ejω)为IMF分量的频域特征。
3.2 压力信号特征提取
压力信号能够在一定程度上反映燃油泵不同的工作状态。当燃油泵发生不同故障时,压力信号均值会有所区别。燃油泵压力信号的正常状态和几种典型故障状态的时域特征如图8~图14所示。

图8 正常状态压力信号时域图Fig.8 Timedomainofpressuresignalinnormalstates

图14 轴承磨损压力信号时域图Fig.14 Timedomainofpressuresignalinwear bearingstate
从表3中可以看出,不同工作状态下的压力信号均值在时域范围内发生了一定程度的变化。因此,可选取压力信号均值EP作为故障特征,压力信号均值EP表达式如下:
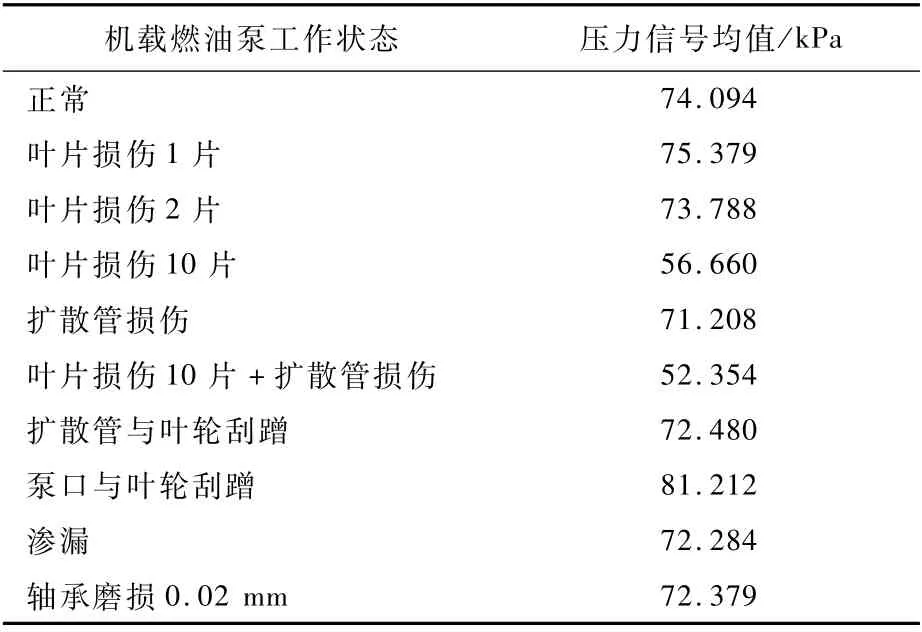
表3 各工作状态下压力信号均值Table3 Averagepressureunderdifferent workingconditions
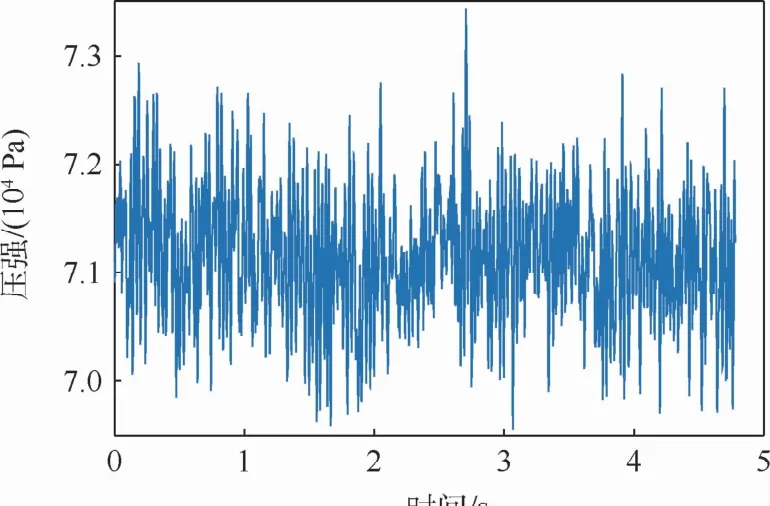
图10 扩散管损伤压力信号时域图Fig.10 Timedomainofpressuresignalwithdamaged diffusiontube
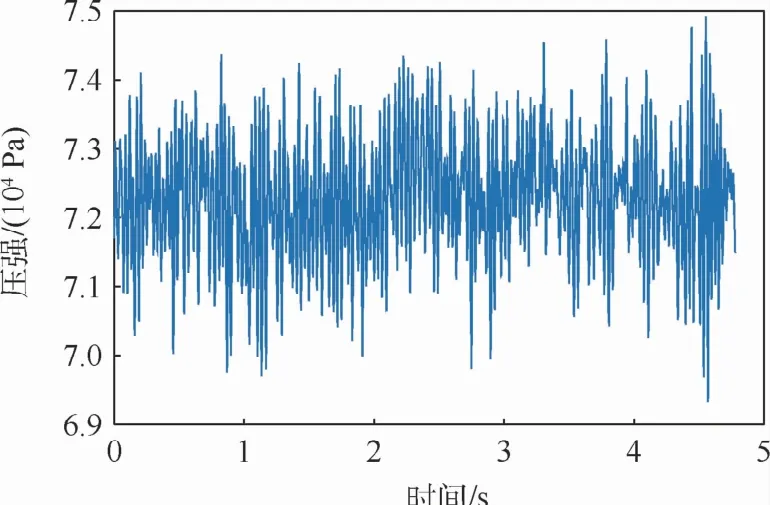
图11 扩散管与叶轮刮蹭压力信号时域图Fig.11 Timedomainofpressuresignalwhendiffusion tubeandimpellerrub
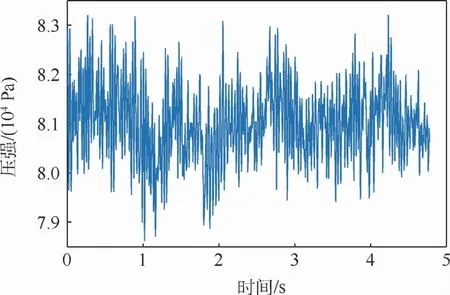
图12 泵口与叶轮刮蹭压力信号时域图Fig.12 Timedomainofpressuresignalwhenpump portandimpellerrub
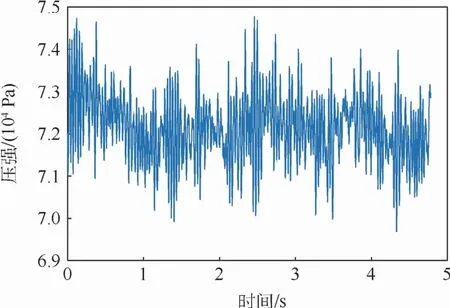
图13 渗漏状态压力信号时域图Fig.13 Timedomainofpressuresignalinleakagestate

式中:n为压力信号的采样数目;Pk为每个采样点的压力值。
4 试验结果
首先,利用机载燃油泵转输系统实验平台获取故障数据,采样参数如表4所示。

表4 燃油泵数据采集参数Table4 Fuelpumpdataacquisitionparameters
其中,每种工作状态记录100组,因此共有1000组故障样本。为构造故障特征向量,首先利用EMD方法对提取的压力信号和振动信号进行处理,然后,对故障特征向量进行归一化处理。表5为燃油泵不同工作状态下归一化故障特征参数。

表5 归一化特征参数Table5 Normalizedpartialcharacteristicparameters
4.1 故障特征选取
由于采集的机载燃油泵故障数据较少,故障特征维数较高,因此,选择适应小样本、高维模式识别问题的SVM 作为机载燃油泵故障的分类模型。由于SVM的惩罚参数c与RBF参数g会影响SVM的分类性能,因此通过网格搜索算法对两者进行优化,以达到较高的故障诊断率。经优化,选取c=18.3792,g=97.0059。
首先,仅以压力信号均值EP作为故障特征,随机选取并计算机载燃油泵10类不同状态共800组数据作为SVM 网络训练样本获得训练模型(其中,正常状态80组、叶片损伤1片80组、叶片损伤2片80组、叶片损伤10片80组、扩散管损伤80组、叶片损伤10片+扩散管损伤80组、扩散管与叶轮刮蹭80组、泵口与叶轮刮蹭80组、渗漏状态80组、轴承磨损0.02mm80组),训练样本编号及分类标签如表6所示。
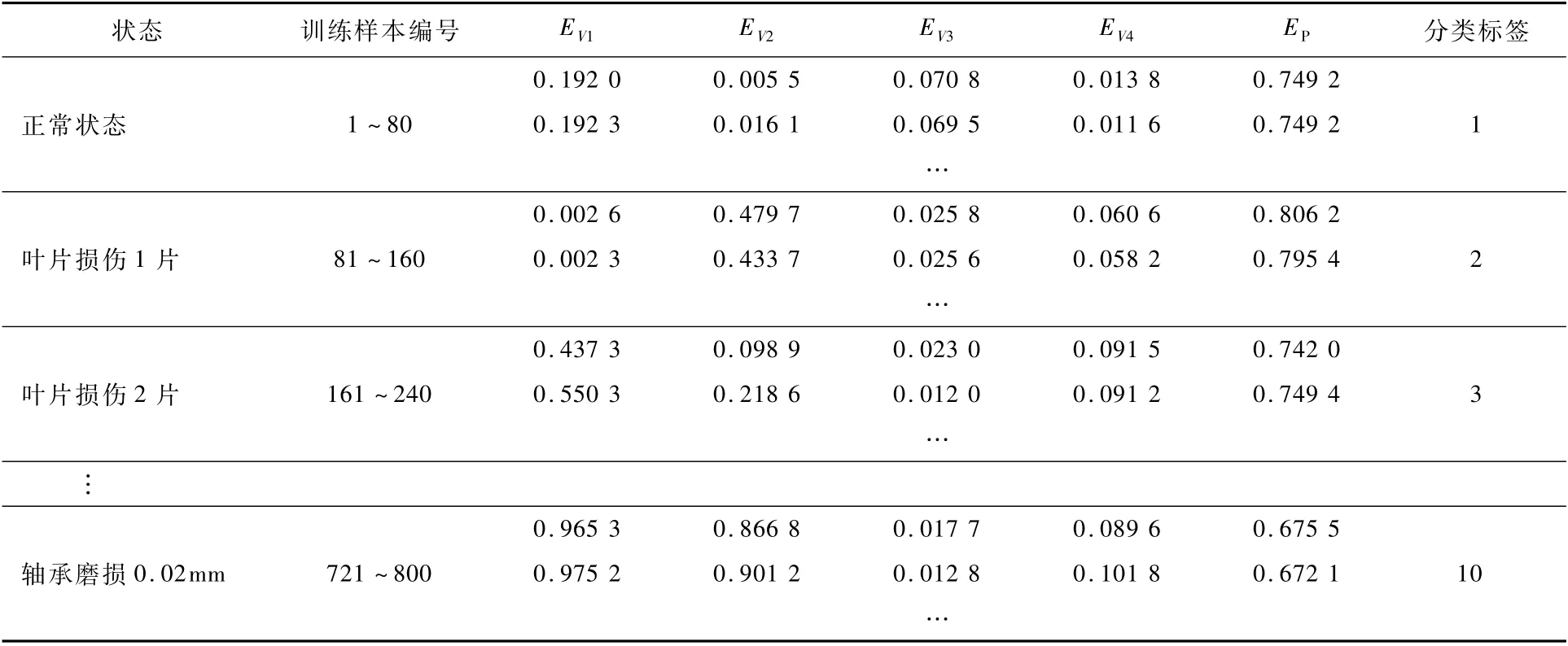
表6 故障特征参数Table6 Faultcharacteristicparameters
之后,将剩余200组数据作为测试样本输入训练模型中(其中,正常状态、叶片损伤1片、叶片损伤2片、叶片损伤10片、扩散管损伤、叶片损伤10片+扩散管损伤、扩散管与叶轮刮蹭、泵口与叶轮刮蹭、渗漏状态、轴承磨损0.02mm 各20组),测试结果如图15所示,故障诊断率为66.0%(132/200)。

图15 基于故障特征向量EP 的SVM测试结果Fig.15 SVM testresultsbasedonfaultfeaturevectorEP
随后,以振动信号IMF能量向量G =(EV1,EV2,EV3,EV4)作为特征向量重复上述方法。测试结果如图16所示,故障诊断率为95.5%(191/200)。

图16 基于故障特征向量G的SVM测试结果Fig.16 SVM testresultsbasedonfaultfeaturevectorG
最后,以特征向量V=(EV1,EV2,EV3,EV4,EP)作为特征向量重复上述方法,测试结果如图17所示,故障诊断率为100.0%(200/200)。
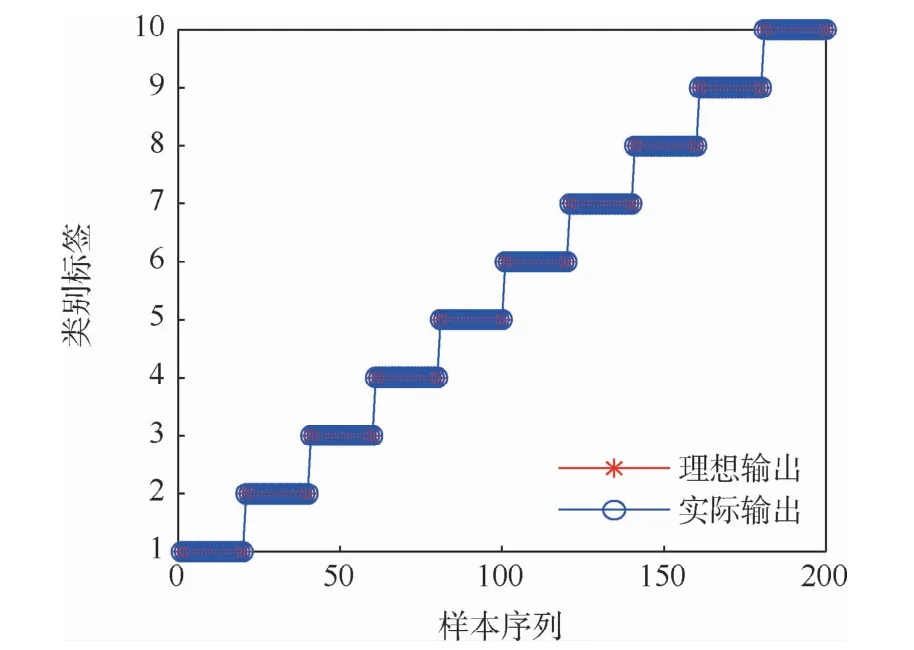
图17 基于故障特征向量V的SVM测试结果Fig.17 SVM testresultsbasedonfaultfeaturevectorV
由3次实验结果可以看出,以压力信号均值EP作为故障特征时,SVM 的故障诊断率较低,仅为66.0%,说明压力信号均值无法较好地反映各类故障的特征,此时容易出现故障识别错误的情况。
以振动信号分解的IMF能量向量G作为故障特征时,SVM 的故障诊断率为95.5%,说明相比于压力信号来说,振动信号能够更好地反映燃油泵的故障特征,但是故障诊断率还有待进一步提高。
当使用振动信号IMF能量向量G和压力信号均值EP组合而成的故障特征向量V时,SVM的故障诊断率为100%,说明相比于前2种故障特征来说,故障特征向量V更能反映机载燃油泵的工作状态,因此可以选择向量V作为故障特征。
4.2 故障诊断高效性对比验证
由于GS在寻优过程中要遍历所有可能的参数值,导致训练时间较长,而且容易陷入局部最优解,降低了故障诊断的效率。相较于传统的寻优算法,群智能优化算法的并行性和分布式特点能够更快地发现复杂优化问题的最优解。因此,分别采用PSO[14]、GA[15]、SSA对SVM的惩罚参数c和RBF参数g进行优化,并与GS优化的SVM进行对比,其中,群智能优化算法的种群内部个体数为10,终止进化代数为100,惩罚参数c与RBF参数g的范围均设置在0.1~100之间,评估指标分别为训练时间和故障诊断率(故障诊断率取20次平均值),结果如表7所示。

表7 算法寻优性能对比Table7 Comparisonofalgorithm optimization performance
由表7可以看出,采用4种优化算法的SVM故障诊断率都比较高,均为100%,说明4种寻优算法均未陷入局部最优解。基于GS的SVM需要遍历整个搜索空间,训练时间长,不利于保证故障诊断的效率;基于SSA或者基于PSO的SVM 训练时间也比较长,同样不利于保证故障诊断的效率。其中,GA的训练时间最短,为19.86s,惩罚参数c与RBF参数g分别为9.5531和15.8599。
图18~图20为基于3种群智能优化算法的适应度曲线。从图18可以看出,尽管基于PSO的SVM 最佳适应度从第1代开始就稳定在100%,但是平均适应度在96% ~100%之间波动,体现了寻优的必要性。
从图19可以看出,基于GA的SVM 最佳适应度和平均适应度从第1代开始就稳定在100%,说明种群中大部分个体属于“较优个体”,体现了GA“优胜劣汰”寻优机制的特点。

图19 GA适应度曲线Fig.19 GAfitnesscurves
从图20可以看出,基于SSA的SVM 最佳适应度和平均适应度从第1代开始就稳定在100%,说明种群中“领导者”和“追随者”属于“较优个体”,体现了该算法“追随”寻优的特点。
综上,4种优化算法均未陷入局部最优解,故障诊断率均达到了100%。并且,从图18~图20可以看出,尽管3种群智能优化算法初始阶段的参数随机性较强,但是依然能够很快地找到参数的最优解,说明EMD方法提取的故障特征精确度高,降低了SVM中惩罚参数c和RBF参数g的影响。在基于3种群智能优化算法的SVM分类模型中,GA_SVM分类模型的训练时间最短,可以选择该分类模型实现机载燃油泵故障的高效诊断。

图18 PSO适应度曲线Fig.18 PSOfitnesscurves
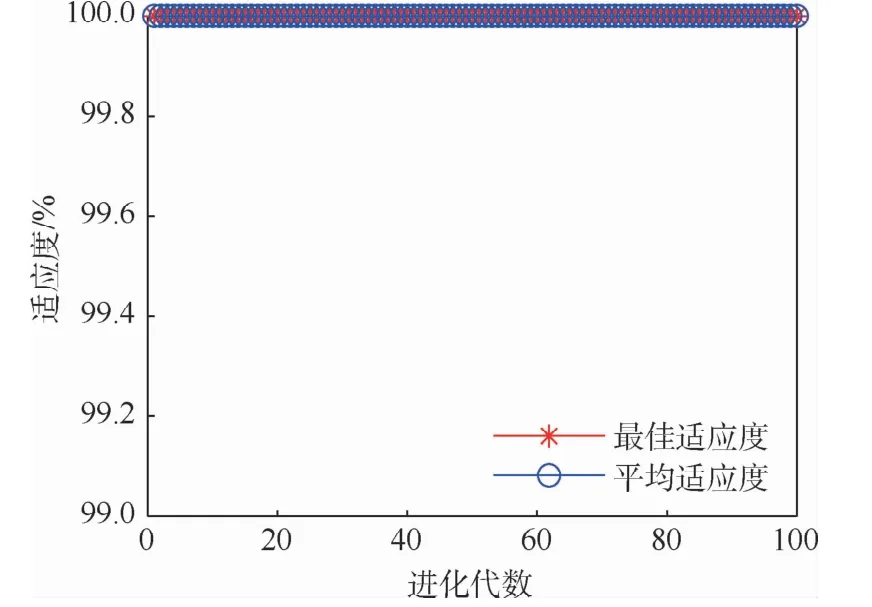
图20 SSA适应度曲线Fig.20 SSAfitnesscurves
4.3故障诊断准确性对比验证
分别采用BP神经网络、极限学习机(ELM)、常规SVM对相同的数据样本进行训练与测试,随机选择训练样本与测试样本,并和基于GA优化的SVM(GA_SVM)进行比较,评估指标分别为用时(包括特征提取时间和测试时间)、故障诊断率(故障诊断率取20次平均值)、诊断方差(20次测试结果的总方差),结果如表8所示。

表8 各分类器评估指标Table8 Evaluationindexofeachclassifier
由表8可以看出,BP神经网络用时较长,为3.0000s,不利于保证故障诊断的效率,并且BP神经网络的诊断方差较高,说明诊断稳定性较低,不利于工程实际的应用。ELM 的故障诊断率较低,为86.95%,不利于工程实际的应用。常规SVM虽然未对惩罚参数c与RBF参数g进行优化,但是诊断方差较低,仅为0.0203,说明EMD方法能够提取较为准确的机载燃油泵故障特征,使得SVM在不同的惩罚参数c与RBF参数g下仍然保持较高的诊断率,降低了SVM参数对故障诊断率的影响。GA_SVM 的用时短,故障诊断率高,达到100%,诊断方差为0,诊断稳定性较好。
虽然常规SVM 和GA_SVM 在用时、故障诊断率、诊断方差3个方面优势相当,但是常规SVM没有对惩罚参数c与RBF参数g进行优化,由于这2个参数在一定范围内的取值存在偶然性,可能会导致训练的SVM 模型性能较差,在工程中需要尽量避免这种偶然性,否则会导致诊断效果较差,所以对两者的优化是十分必要的。
5 结 论
针对机载燃油泵故障数据来源较少、诊断效率较低、维护费用较高、缺乏有效故障特征的问题,设计开发了机载燃油转输系统实验平台,模拟燃油泵10种工作状态,监测振动信号和压力信号,通过时频特性和统计特性,构造故障特征向量,提出基于EMD和SVM 的机载燃油泵故障诊断方法,结果表明,本文方法可以有效地提取故障特征,并提高故障诊断效率。通过对实验进行分析和验证,得到以下结论:
1)压力信号无法较好地反映机载燃油泵的故障特征,故障诊断准确度较低。而振动信号能够较准确地反映出机载燃油泵的各种故障特征,故障诊断准确度较高,但还有提升的空间。通过2种信号的结合,故障诊断的准确度得到了进一步的提升。
2)采用3种群智能优化算法的SVM故障诊断率均达到了100%,寻优过程中均未陷入局部最优解,且寻优速度相当。但是在训练时间上,GA优于其他3种算法,从节约计算资源以及时间耗费上考虑,可以选择GA对SVM 参数进行优化,提高机载燃油泵故障诊断效率。
3)SVM的故障诊断率和诊断稳定性均高于人工神经网络,证明了SVM在小样本、非线性、高维模式识别问题的优势。