基于相关功率修正的地基GNSS-R 土壤湿度反演
2021-09-11洪学宝张波阮宏梁汉牟田杨东凯宋曙辉
洪学宝 张波 阮宏梁 汉牟田 杨东凯 宋曙辉
(1. 北京航空航天大学 电子信息工程学院, 北京 100083; 2. 金华职业技术学院 金义网络经济学院, 金华 321000;3. 北京市农林科学院 蔬菜研究中心, 北京 100097)
土壤湿度是全球水循环的重要组成环节,土壤湿度的观测对气候、气象以及农业等领域具有重要意义[1]。 全球导航卫星系统反射信号测量技术(Global Navigation Satellite System Reflectometry, GNSS-R)是一种利用地球表面反射的GNSS信号进行地物参数反演的遥感技术[2],在土壤湿度观测方面极具应用潜力[3-4],其中地基观测的研究工作由于资源消耗少、可重复性好而得到广泛关注[5-6]。
GNSS-R 土壤湿度遥感一般采用2 副天线分别接收直射GNSS 信号和地面反射的GNSS 信号,通过计算直反信号相关功率估计地表反射率,最终根据反射率与土壤湿度之间的映射关系反演土壤湿度。 然而,实际天线除可以接收前向主极化信号外,还会接收到背向主极化和全向交叉极化信号。 这些干扰信号会造成目标信号的相关功率观测偏差,进而影响土壤湿度反演质量。 在国内外研究中,文献[7] 指出了右旋圆极化(Right Hand Circular Polarization, RHCP)天线背向抑制不完全会造成直射信号的载噪比序列的振荡,文献[8]进一步讨论了RHCP 天线的左旋圆极化(Left Hand Circular Polarization, LHCP)增益分布对于接收信号功率测量的影响。 文献[9-10]在讨论地基GNSS-R 土壤湿度观测实验结果的过程中提及了多径信号会造成土壤湿度观测偏差,但并未具体给出解决方法。 文献[11]在实验数据处理过程中采用了二阶多项式拟合的方法对非理想RHCP 天线接收的直射信号进行修正,然而反射信号修正并未得到讨论。 因此,定量描述直反天线非理想性造成的相关功率偏差并开展偏差修正方法研究对于地基GNSS-R 土壤湿度反演具有重要意义。
本文介绍了土壤湿度反演原理,给出了实际天线接收信号的相关功率模型。 为了消除天线非理想性造成的信号相关功率振荡偏差,提出了基于多项式拟合的直反信号相关功率修正方法,设计和开展了地基GNSS-R 土壤湿度观测实验,验证了本文方法对土壤湿度反演性能提升的有效性。
1 地基GNSS-R 土壤湿度反演原理
地基GNSS-R 土壤湿度观测中,一般以RHCP天线指向天顶接收直射信号,以LHCP 天线指向天底接收反射信号。 天线架设高度较低时,可认为到达地面的直射信号与到达天线的直射信号具有相同的功率密度和载波频率。 给定时刻t,理想天线接收的信号可以表示为
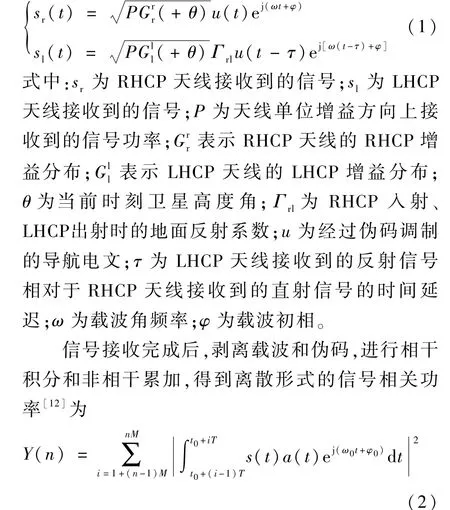
式中:s表示被处理的信号;Y表示该信号相关功率;a表示本地产生的伪码序列;ω0为本地生成的载波角频率;φ0为本地生成的载波初相;t0为相干积分起始时刻;T为相干积分时间;M为非相干累加次数。
假定处理过程中直射信号完全同步,那么两信号的相关功率可以表示为

根据电磁波反射理论,地表反射率由卫星高度角和土壤介电常数共同决定[13]。 由于卫星高度角可以通过定位解算得到,每一时刻的地表反射率与土壤介电常数一一对应。 如此,可以利用地表反射率估值计算土壤介电常数,进而根据土壤介电常数模型反演土壤湿度。 以上即为地基GNSS-R 土壤湿度反演的基本原理。
2 实际天线接收信号相关功率
由于背向抑制和交叉极化抑制性能的不理想,实际RHCP 天线和LHCP 天线接收到的信号均包括3 种成分:直射RHCP 信号、反射RHCP 信号以及反射LHCP 信号。 那么实际天线接收的信号表达为
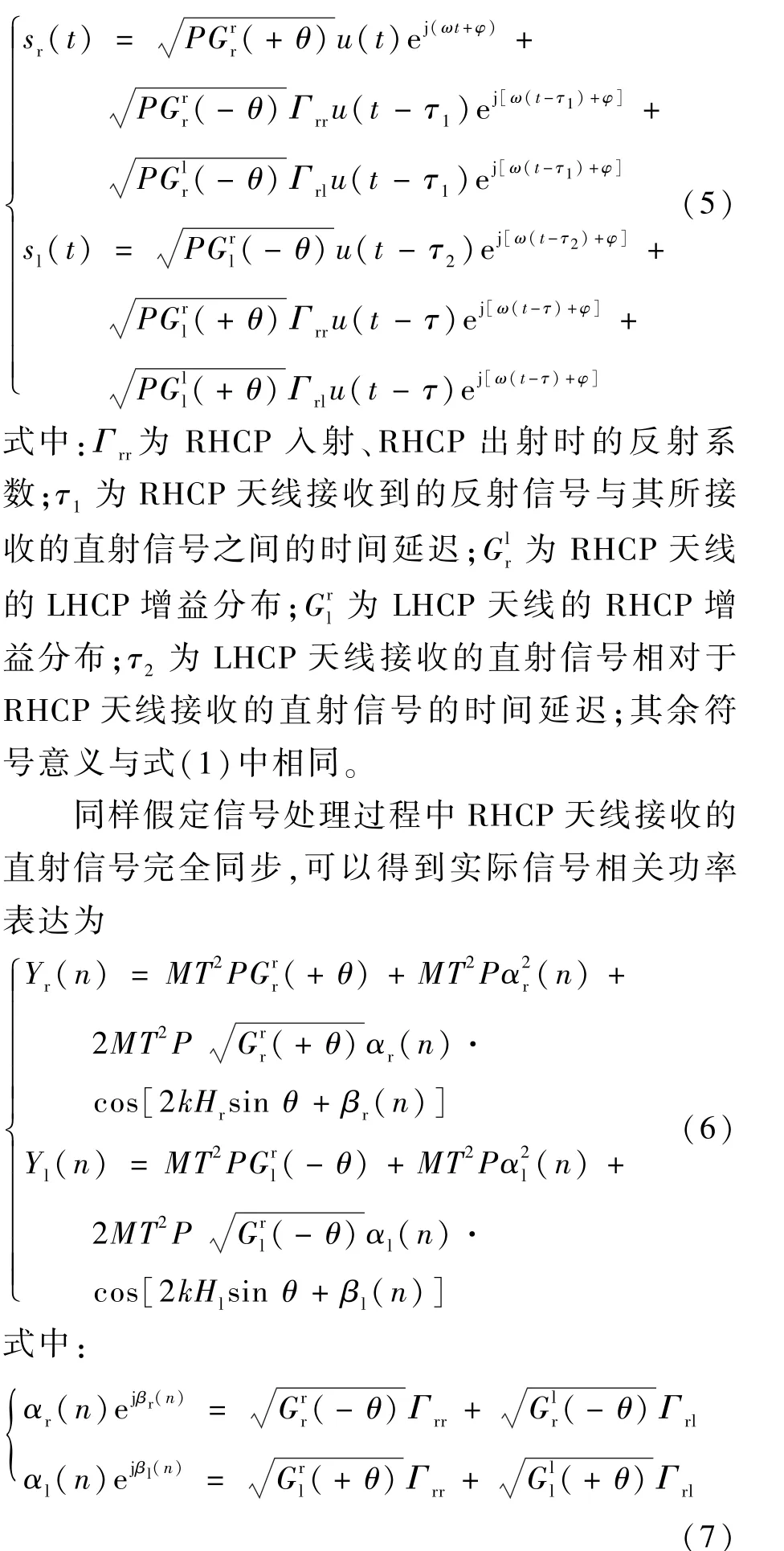
其中:k为GNSS 信号波数;Hr和Hl分别为RHCP天线相位中心和LHCP 天线相位中心距离地面的高度。
对比式(3)和式(6)可见,实际信号相关功率相对于目标信号相关功率产生了一定偏移并伴随类余弦振荡,其中类余弦振荡项对相关功率测量影响尤为严重。 因此,本文拟通过多项式拟合方法对信号相关功率中的类余弦振荡偏差进行修正。
3 基于多项式拟合的相关功率修正
在卫星上升或下降期间,卫星高度角正弦值与时间一一对应,将其视为离散时间自变量n,那么两信号相关功率表达可以统一为如下形式:

式中:A为趋势项;B为振荡包络;F为振荡频率;Φ为振荡初相。
显然,式(8)描述的是一类具有缓变趋势并伴随余弦振荡的非平稳序列,那么本文所讨论的相关功率修正本质上是这种非平稳序列趋势项提取问题,可以通过多项式拟合的方法实现[14]。 考虑以如下多项式对信号相关功率进行拟合:
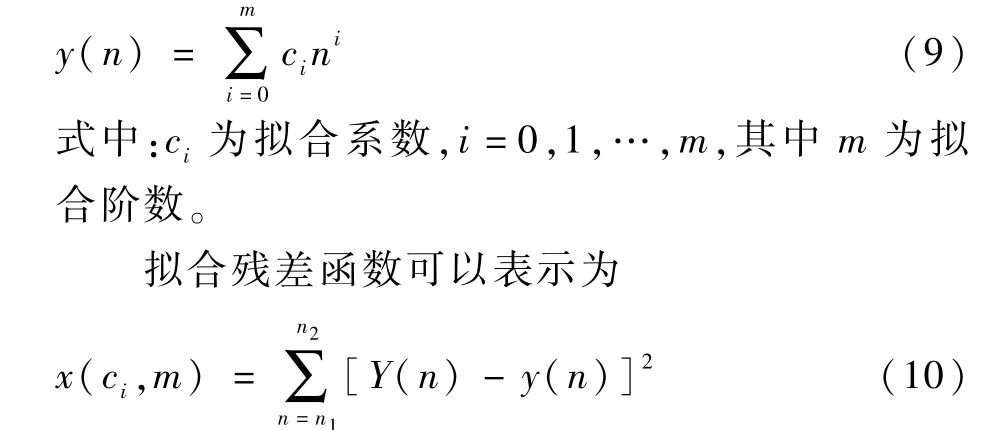
式中:n1为相关功率曲线起始时刻;n2为相关功率曲线终止时刻。
在拟合阶数确定的情况下,最优拟合系数可以在最小二乘准则约束下得到,即在残差函数对各拟合系数偏导为零时取得:

如此,可以确定观测序列在特定拟合阶数下的最优拟合表达。 接下来结合地基GNSS-R 土壤湿度观测中信号相关功率随卫星高度角变化特点,给出基于多项式拟合的信号相关功率修正流程。
1) 数据筛选。 数据筛选原则:第一,剔除地球静止轨道(Geostationary Orbit, GEO)卫星观测数据,因为GEO 卫星高度角几乎不变,其信号相关功率不会表现为类余弦振荡,所以多项式拟合修正失效;第二,根据可见星高度角和方位角,估算镜面反射点位置,筛除镜面反射点不在目标观测区和天线覆盖区的相关功率样点,以保证反射信号数据有效;第三,根据卫星高度角变化将相关功率序列分割为上升或下降段,利用天线架设高度估算振荡周期,将分割后的各波形中振荡周期数量小于1 的数据段整体筛除,防止数据不足造成拟合误差过大。
2) 拟合修正。 首先,确定拟合阶数。 拟合阶数取决于信号相关功率波形趋势项。 直射信号相关功率趋势项与天线增益分布和天线最大增益方向指向有关,而反射信号相关功率趋势项还与反射面特性有关。 一般情况下,直射信号相关功率修正的拟合阶数可取1 阶或2 阶,反射信号相关功率修正的拟合阶数可取2 阶或3 阶。 然后,确定拟合系数。 以卫星高度角正弦值为自变量,以反射信号相关功率为因变量,利用最小二乘方法求解对应阶数下的多项式拟合系数。 将确定的拟合阶数、拟合系数和拟合自变量代入式(9)中,即得到修正后的信号相关功率。
至此,直射信号和反射信号修正完毕,二者在时间上进行匹配后即可根据式(4)进行地表反射率估计,进而实现土壤湿度反演。
4 实验验证
4.1 数据采集
笔者团队于2018 年11 月19 日下午在北京市农林科学院蔬菜研究中心实验农场(39.698 5°N,116.696 8°E)开展了地基GNSS-R 土壤湿度观测实验。 实验场地开阔、无植被,地面均方根高度约为0.01 m。 实验内容包括直反射GNSS 信号采集和土壤湿度数据采集。 GNSS 信号采集中,利用RHCP 天线和LHCP 天线分别接收直射和反射信号,以GNSS 信号采集器对天接收的信号进行连续采集,数字中频信号存储在PC 机中。 其中,14:36—15:36 采集GPS 信号,15:39—16:39 采集BDS 信号。 天线架设情况为:RHCP 天线中心距地面高度约1.85 m,最大增益方向指向天顶;LHCP 天线中心距地面高度约1.80 m,最大增益方向斜指地面,指向方位角约180°,俯仰角约45°。土壤湿度数据采集中,利用预置的3 个频域反射(Frequency Domain Reflectometry, FDR)土壤湿度传感器实时监测和存储目标区域土壤湿度,传感器掩埋深度5 cm,相邻2 次测量间隔5 min。 实验场景如图1 所示。

图1 实验场景Fig.1 Experimental scenario
4.2 数据处理
首先,利用软件接收机对数字中频信号进行后处理,完成位置解算以及直反信号相关功率的计算。 图2 给出了实验期间的可见星空视图。
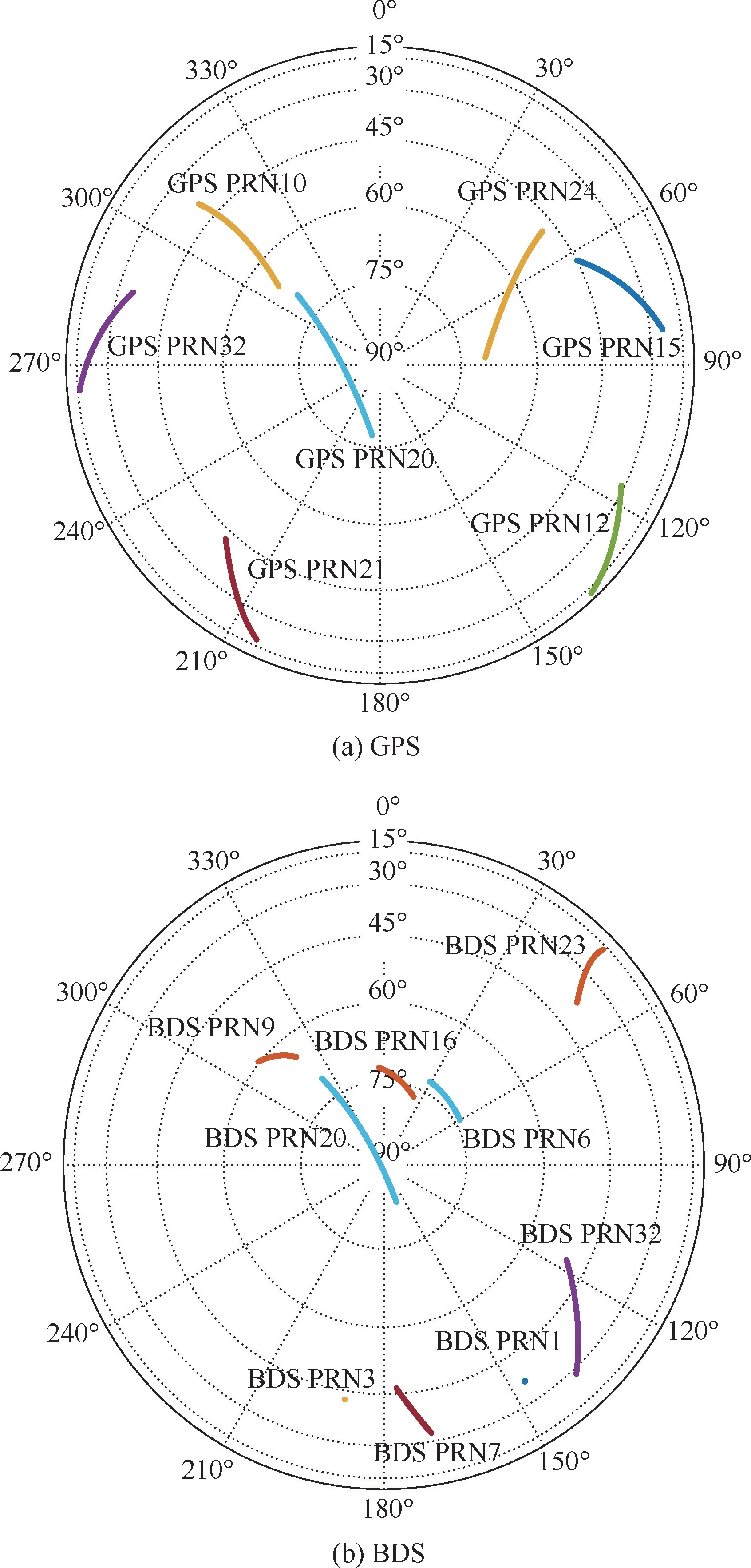
图2 GPS 与BDS 可见星空视图Fig.2 Visible starry sky plots of GPS and BDS satellites
然后,根据第3 节给出的方法对直反信号相关功率进行数据筛选和拟合修正,这里直反信号相关功率修正拟合阶数分别为2 和3。 图3 给出了修正前后直反信号相关功率曲线,可见天线性能的非理想性造成了信号相关功率的类余弦振荡,而多项式拟合可以修正这种偏差。
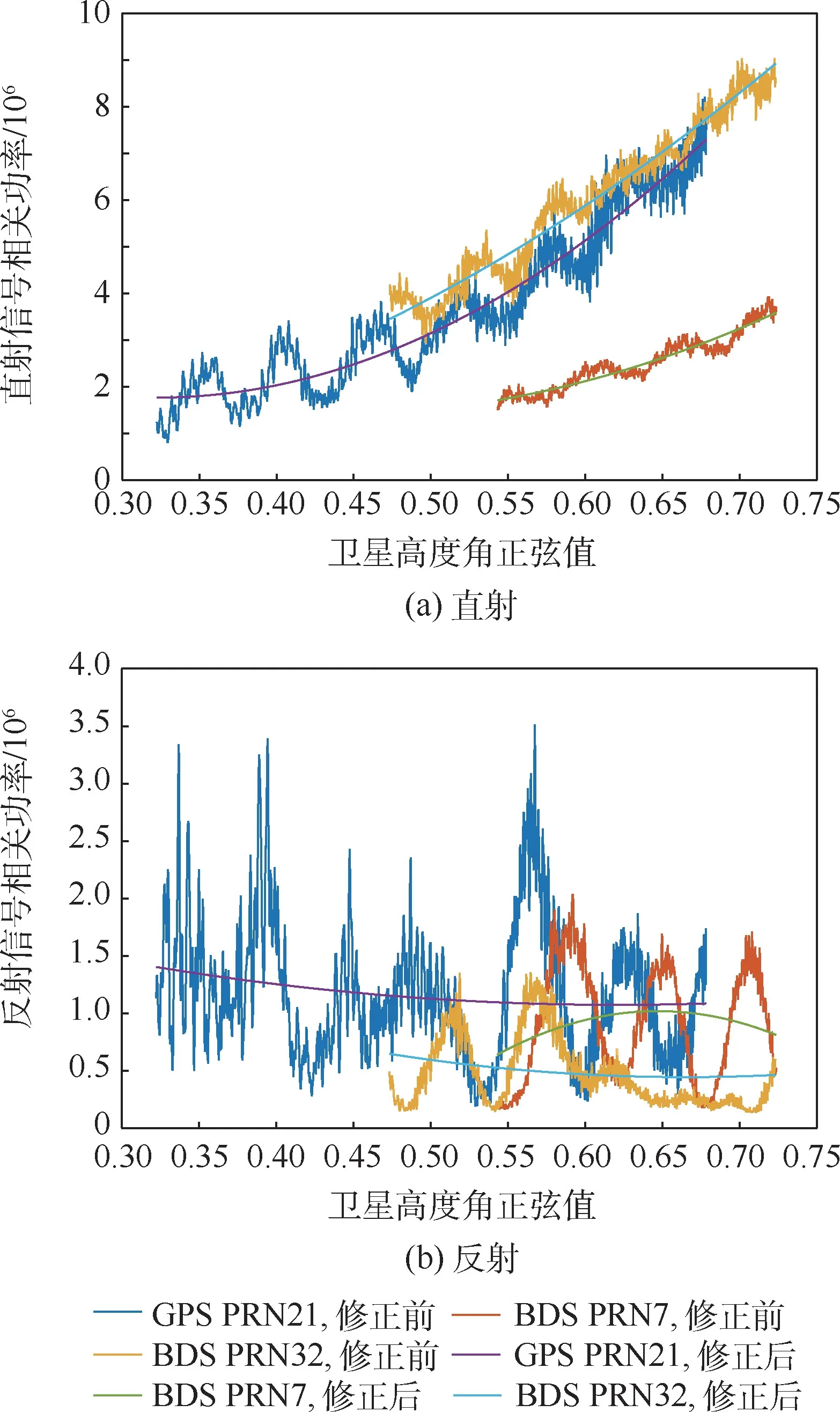
图3 修正前后直射和反射信号相关功率Fig.3 Correlation power of direct and reflected signals before and after correction
最后,利用修正后的直反信号相关功率估算土壤反射率,进而计算土壤介电常数,再依据文献[15]中采用的Wang 模型完成土壤湿度的反演。 图4 给出了修正前后GNSS-R 土壤湿度的反演结果以及FDR 传感器实测土壤湿度值,其中横轴刻度值对应14:30—16:45 共8 100 s。

图4 土壤湿度测量结果Fig.4 Soil moisture measurement results
4.3 结果分析
本节将从数据有效性和结果准确性2 个方面对修正前后的结果进行对比分析。
首先,统计各卫星观测数据量和修正前后有效反演数据量。 根据第1 节所述的反演理论,在卫星高度角确知的条件下,由土壤湿度变化范围可以确定地表反射率变化区间,超出区间的反射率数据视为无效。 这里取土壤湿度范围为0 ~60%,得到的数据有效性统计结果如表1 所示。
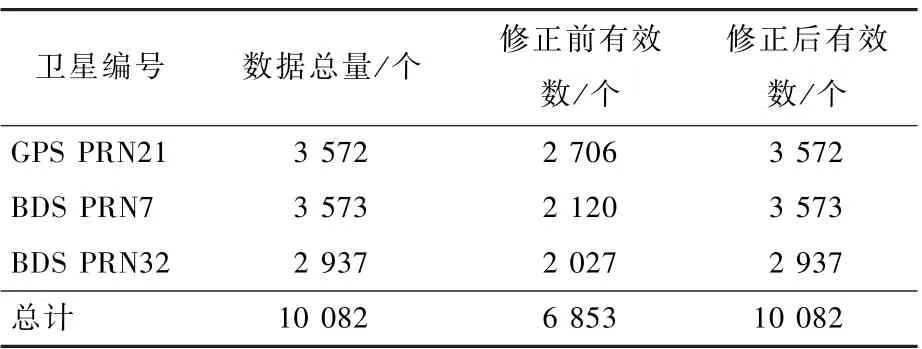
表1 数据有效性统计结果Table 1 Statistical results of data validity
从表1 中给出的统计结果可见,相关功率修正前,可见星GPS PRN21、BDS PRN7 和 BDS PRN32 的观测数据有效率分别为76%、59% 和69%;而相关功率修正后,3 颗可见星的观测数据有效率均为100%。 整体来看,相关功率修正使观测数据总有效率由68%提升至100%。 上述结果说明,基于多项式拟合的相关功率修正方法可以提高GNSS-R 土壤湿度反演过程中的观测数据有效性。
然后,计算相关功率修正前后反演结果的误差。 考虑整个观测时段内FDR 传感器测得的土壤湿度几乎不变,本文在处理过程中取传感器数据均值作为土壤湿度真值。 表2 给出了相关功率修正前后反演结果的均方根误差(Root Mean Square Error, RMSE)情况。 可见,经过相关功率修正,利用GPS PRN21、BDS PRN7 和BDS PRN32信号反演得到的土壤湿度结果RMSE 分别减小2.2%、0.4%和6.5%,总体观测结果RMSE 减小3.2%,说明相关功率修正提升了GNSS-R 土壤湿度反演结果的准确性。
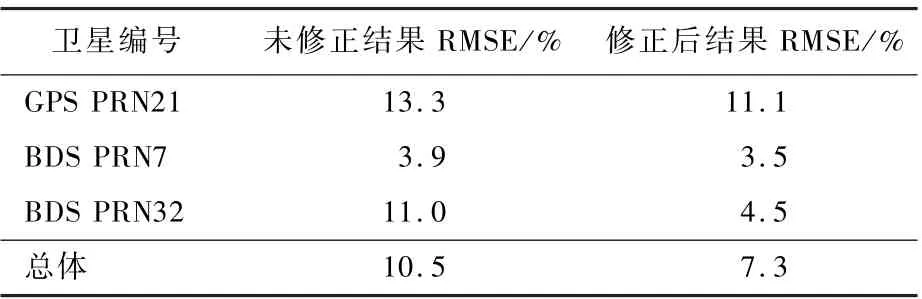
表2 反演结果均方根误差Table 2 RMSE of retrieval results
从上述分析可知,基于多项式拟合的相关功率修正可以提升GNSS-R 土壤湿度反演过程中的观测数据有效性以及反演结果准确性。 然而注意图4 中给出的结果,修正后反演结果仍然存在偏差,偏差与时间(卫星高度角正弦值)具有相关性,尤其是在结果序列始末位置偏大。 本文对此的解释是:首先,多项式拟合逼近的是相关功率序列的趋势项,而趋势项中除目标信号成分外还有缓变的干扰信号成分,映射到土壤湿度反演结果中即为时变偏差;其次,方法本身引入了拟合偏差,由于拟合自变量是与时间相关的卫星高度角正弦值,拟合偏差引起的反演结果偏差同样具有时变特性,而且拟合偏差在序列始末位置普遍偏大,造成了对应位置的反演结果偏差偏大。
5 结 论
1) 地基GNSS-R 土壤湿度反演中,天线非理想性会造成目标信号相关功率测量偏差,偏差包括振荡项成分和趋势项成分。 基于多项式拟合的相关功率修正方法可以有效消除偏差中的振荡项成分,提高观测数据有效性和反演结果准确性。
2) 相关功率修正后反演得到的土壤湿度与实测土壤湿度数据仍存在一定偏差,尤其是反演序列始末位置偏差较大。 反演偏差是由相关功率趋势项中的干扰信号成分和拟合偏差共同造成的,而反演结果序列始末位置偏差主要源自拟合偏差,实际应用中可以选取序列中段位置的反演结果以获得更优的反演性能。
3) 相关功率修正通过多项式拟合实现,存在一定应用限制。 第一,拟合自变量为卫星高度角,该方法无法应用于高度角几乎不变的GEO 卫星。第二,为了避免欠拟合,该方法也不宜应用于数据长度过短的非GEO 卫星。 第三,该方法为数据后处理方法,不适用于实时处理场景。