基于BIM技术的运维点检路径规划研究
2021-09-10吉翔彭有刚李海敬少民彭冯杰
吉翔 彭有刚 李海 敬少民 彭冯杰

摘 要:本文以某光学元件基地为例,研究基于BIM模型的室内路径规划技术。首先建立建筑物BIM参数化模型,主要通过由轻能量转换、模型解析、楼层分解以及三角网格划分等方式,来构成室内的基础路网。基于此,通过优化传统的路径规划算法实现多楼层、障碍物自动规避的路径规划,并以HTML5/WebGL技术为基础,在web端浏览器展现三维可视化漫游路径,为运维业务提供场景支撑,因此其具有一定的直观性和实用性。
关键词:BIM;路径规划;运维;点检
中图分类号:TU17;TU71 文献标识码:A 文章编号:2096-6903(2021)01-0000-00
当前,国内外机构对室内路径规划进行了一定程度的研究,并取得了一定成果。研究发现,国内室内路径规划主要基于二维平面图,运用基于导航网格的A*算法或传统的Dijkstra算法,存在障碍物边缘识别效果不理想,路径不是最优的缺点[1]。
本文借鉴国内外研究思路,将GIS技术与BIM技术相融合,通过提取BIM模型的几何和语义信息,达到获取室内可通行区域的目的,以建筑信息模型为数据源,改进传统启发式A*寻路算法,进行路径规划及可视化展示,实现室内建筑路径规划的最优化。
1 项目背景
某光学元件基地项目占地面积约为133,000m2,建筑面积约为32,800m2,包括6幢单层建筑,其局部2层屋面为钢结构。本文选取1#楼作为路径规划及可视化展示的区域,如下图1所示。
2 创建参数化路径规划模型
采用Revit创建光学元件BIM模型,需要保证其构件以及属性星系的完整性,而模型所展现的精度,也必须符合运维模型的基本要求,并且能够以此模型提取的构建信息来作为障碍物识别,并将其可通行路径转化为数据源[2]。对于其构建信息中所饱含的几类元素信息,主要有以下几种:
(1)建筑物以及房间内部的各个出口以及入口;
(2)建筑物内各楼层平面以及竖向通道,包括楼层层次中各种楼梯;
(3)建筑物内空间构建,如横梁,墙面、地板以及走廊等;
(4)建筑物内日常运转的维护设备,如消防以及自控等。
对于BIM模型的解析,其前提是通过相关知识的构建来实现路径规划模型的构建,再通过对其中构建信息以及规划路径的提取,来选择更为高效和准确的解析方式。
通过自主研发的轻量化工具解析,对解析对象模型的几何信息、关系信息以及属性信息进行深入的研究,并通过对解析而来的这些信息经过三角网格化的方式进行处理。将其构建信息和路径规划数据通过JSON的形式储存于数据库中。
3 室内基础路网构建
Delaunay三角剖分是前苏联数学家Delaunay在1934年提出的:“对于任意给定的平面点集,只存在着唯一的一种三角剖分方法,满足所谓的“最大—最小角”优化准则,即所有最小内角之和最大”[3]。
Delaunay三角剖分廣泛应用于数值分析(比如有限元分析)以及图形学,室内路网的划分就运用到了三角剖分的原理。
对于包含障碍物的室内环境而言,在对BIM模型进行Delaunay三角剖分时,首先进行全局Delaunay三角化,再考虑障碍物区域,剔除障碍物区域的三角网,得到室内可通行区域,具体步骤如下:
步骤1:随机在参数化路径规划模型中插入离散点,采用Bowyer-Watson算法,进行模型初始Delaunay三角化。
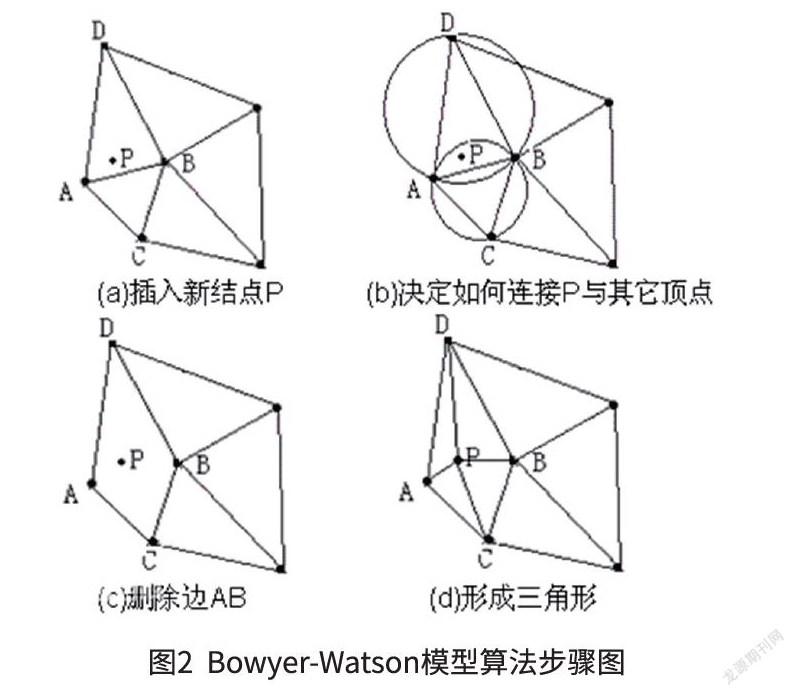
Bowyer-Watson算法,如下图2所示,过程步骤:
(1)通过构建三角模型,将数据点进行包围;
(2)通过引入新的定点,通过新顶点的外围圆找到其对应三角形;
(3)删除圆内部中间的边,围绕新点构成新多边形;
(4)将新顶点与新的多边形的每一个顶点进行连接,形成新的三角形;
(5)重复第二步,直至所有的顶点增加完毕。
步骤2:识别障碍物边缘,初始三角网被障碍物边缘切割,将模型中各多变形分解切割为三角形,然后在以步骤1的方式进行模型的三角化,如此直到模型中的障碍物与其封闭空间再度呈现三角剖分,进而实现完全Delaunay三角化。
步骤3:将障碍物内部的三角形删除,得到室内可通行区域。
三角网划分得越精细,室内路网形成的路径越圆滑,三角网划分完毕后,选取Delaunay三角形的重心作为路径规划模型寻路节点,节点串联起来形成路径。
4 路径规划算法优化
对于室内环境下的路径规划,首先需要结合建筑内部的空间结构、楼层衔接等重要因素来考虑其路径规划的算法,其次再根据其建筑物内部建筑提点,自其算法原理以及室内寻路效率的角度,对其传统的路径规划算法如Dijkstra算法、Ant算法、A*算法等进行综合分析和比较,见表1。
通过对当前主流路径规划算法的使用场景以及优缺点进行相应的对比分析,结合其项目的实际需求,笔者最终选用传统启发式A*寻路算法作为建筑内空间关系的室内路径规划算法。
在对模型进行信息提取后,首先需要进行Delaunay三角剖分处理,形成参数化路径规划子模型,结合室内的障碍物分布情况以及各楼层的空间衔接关系,将建筑内路径规划分为单层寻路和多层寻路两种空间寻路类型进行考虑[4]:
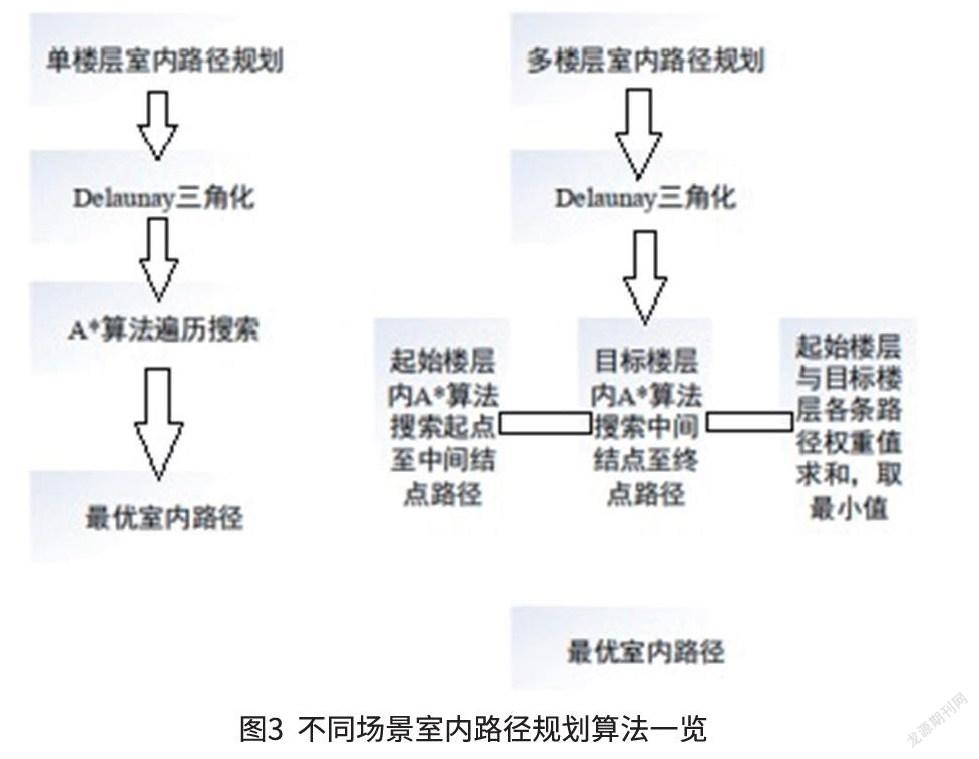
(1)单楼层寻路:通过对BIM模型进行Delaunay三角化后,识别障碍物,形成可通行区域,采用传统A*算法进行路径搜索算出多条路径,并通过路径评价方案确定最优通行路径,如下图3所示。
(2)多楼层寻路,分别对起点楼层和终点楼层进行Delaunay三角剖分,将室内的楼梯作为路径规划的中间节点,在此基础上,用A*算法分别搜索起点至中间节点路径,中间节点至终点楼层路径。最终通过对各楼层内路径进行最优评价,进行路径权重求和、汇总和比较,筛选最小值,将两条路径与中间节点连接起来构成从起始节点至终止节点的最优路径,其权重值就是该条路径的实际代价值[5]。
5 可视化路径展示
对于BIM的操作应用来说,其正常的开展都是需要在三维可视化的环境中进行的。
在BIM操作中,其应用均是在三维可视化的环境下展现出来的,对于其漫游、旋转、剖切、缩放等操作。通过对可视化平台的利用,建筑物整体的形态,室内的路进信息等数据会得以直观表达,并且还能够根据其对应的快速查询设备来帮助运维人员处理日常的巡检任务。
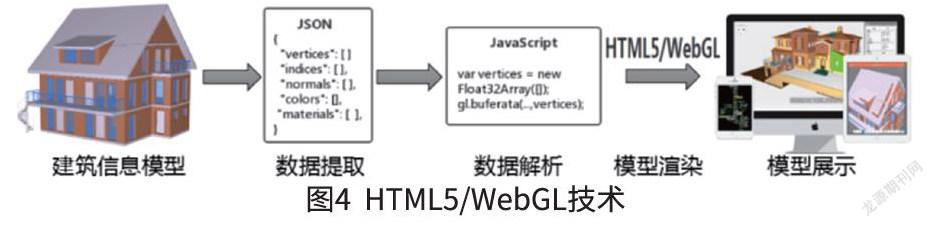
采用WebGL技术可实现路径导航三维可视化展示,WebGL属于一种3D绘图协议,全称写为Web Graphics Library[6]。该绘图协议中,将JavaScript和OpenGL ES 2.0结合到了一起,并通过让两者之间增加一个绑定,来使得WebGL能够为HTML5 Canvas提供对应的硬件3D加速渲染。如此也省去了对相应渲染插件的开发,通过借助系统显卡对其中的3D场景以及模型进行流畅的展示来创建出复杂的导航以及数据视觉效果。
在HTML5/WebGL技术的使用过程中,能将系统数据库内部如走廊、门、窗等的相关构件数据通过以JSON的格式进行提取解析,并在JavaScript中开始对应的图形渲染,从而达到对室内场景的可视化展示,如下图4所示。
通过对光学元件6#楼模型按楼层进行分解,完成Delaunay三角剖分,识别楼层内障碍物,构建室内基础路网,选取Delaunay三角形的重心作为寻路节点,计算出最优点检路径,在路径导航过程中可以通过点击模型构件查询路径所经过的消防设备、自控设备等信息[7]。
6 结语
本文通过解析BIM模型语义,通过对其中的轻能量转换问题、楼层解析以及分解问题以及三角网格划分问题的处理以此形成室内的基础路网。在此基礎上,优化传统的路径规划算法实现多楼层、障碍物自动规避的路径规划。以HTML5/WebGL的操作技术为基础,通过浏览器可三维可视化展示其对应的漫游路径,为运维业务提供场景支撑,因此具有一定的借鉴价值。
参考文献
[1] 高媛,王勇,崔恒东,等.BIM与物联网技术在综合管廊设备运维管理中的应用[J].智能建筑与智慧城市,2020(11):101-104.
[2] 李谧,贺晓钢,李博涵,等.基于BIM+GIS的市政工程规建管一体化应用研究[J].地下空间与工程学报,2020,16(S2):527-539.
[3] 张阳.基于国内BIM运维管理研究综述[J].城市建筑,2020,17(30):191-193.
[4] 尹成福,陈小锐.BIM技术在526国道改建工程建管养全过程中的应用[J].四川水力发电,2020,39(5):118-121+130.
[5] 唐多琼.BIM技术在IDC数据中心的应用[J].信息通信,2020(10):228-230.
[6] 王凡,李铁军,刘今越,等.基于BIM的建筑机器人自主路径规划及避障研究[J].计算机工程与应用,2020,56(17):224-230.
[7] 何磊.基于BIM的建筑消防疏散路径规划分析[J].消防界(电子版),2019,5(12):16.
收稿日期:2020-11-21
作者简介:吉翔(1982—),男,四川成都人,本科,工程师,研究方向:电气工程自动化。
A Study on Path Planning of Operation and Maintenance Spot Inspection Based on BIM Technology
JI Xiang,PENG Yougang,LI Hai,JING Shaomin,PENG Fengjie
(Laser Fusion Research Center, China Institute of Engineering Physics,Mianyang Sichuan 621900)
Abstract: This article takes an optical component base as an example to study the indoor path planning technology based on the BIM model. First, establish a BIM parameterized model of the building, and form the basic indoor road network through lightweight conversion, model analysis, floor decomposition, and triangular grid division. On this basis, the traditional path planning algorithm is optimized to achieve multiple floors and obstacles. Based on HTML5/WebGL technology, the three-dimensional visual display of the roaming path is displayed on the Web browser to provide scene support for the operation and maintenance business, therefore,which is intuitive and practical.
Keywords: BIM;path planning;operation and maintenance;spot inspection
