基于共轭成像技术的助航灯光强检测方法分析
2021-09-10杨威
杨威
摘要:在目视助航系统中,机场助航灯具是非常关键的构成部分,它的光度学参数能够对灯具工作情况进行检验,是关键的参考依据,通常会运用的检测方法包括,在拆卸完成之后,开展离线检测,借助巡检车辆实现在线检测,但是第一种检测方式需要比较长的维护周期,第二种检测方式的使用成本相对较高。基于此文章给出了如下文所述的检测系统,以期能为相关人员提供借鉴。
关键词:助航灯具;光强检测;CCD测量元件;LED阵列
引言:在目视助航系统中,助航灯光起着关键性作用,它包含多种灯具,比如跑道上对起降起一定引导作用的灯具,亦或是在滑行道上发挥指示作用的灯具,它的作用是为了在夜间等的状况下,对跑道与滑行道情况进行标示,给予驾驶者一定的地面参考,防止出现飞行事故。助航灯光属于信号光源,它对光度学参数有着非常高的要求,与此同时,其中心光强也很高,在出射角范围上也有着苛刻的要求。对此,有必要对助航灯具开展定期维护及检测工作。伴随航空业的发展,在运输安全方面越来越重视,这就亟需迅速及准确地完成助航灯光检测工作。
1.系统构成
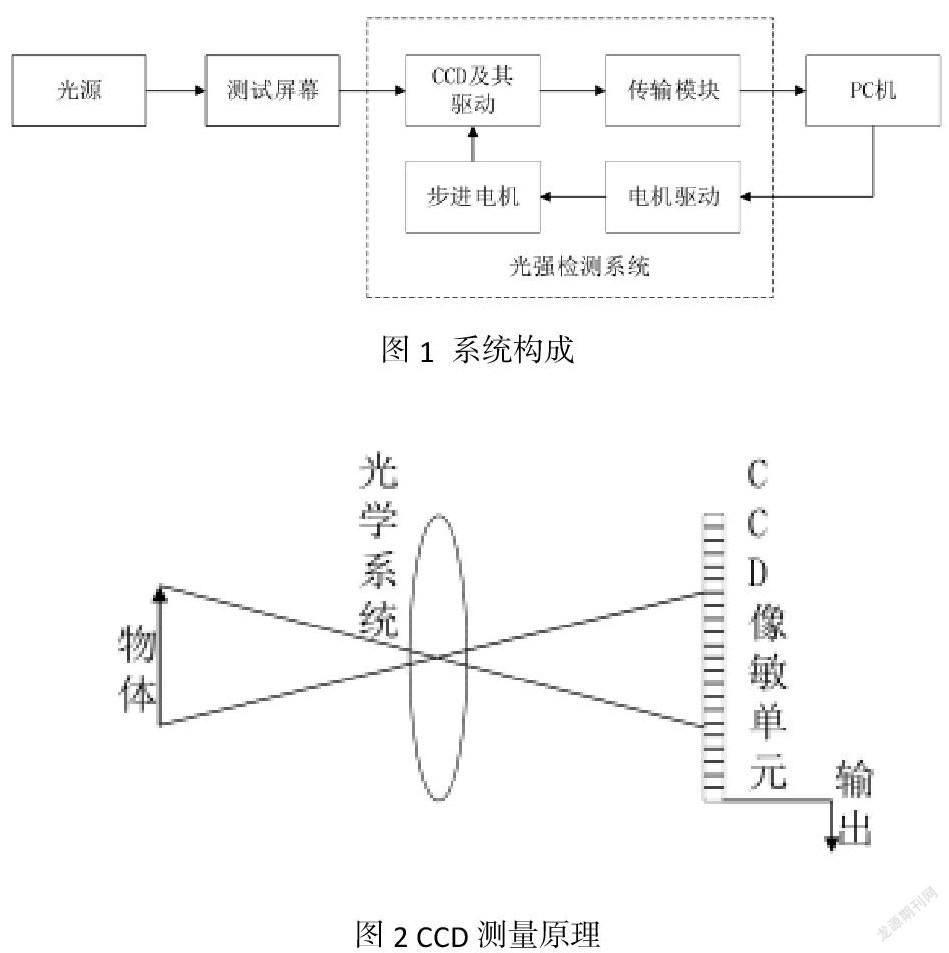
对于照度检测系统来讲,其包含着较多的构成成分,例如PC机以及步进电机等,图1所示为系统构成。针对助航灯具而言,在其前面放置检测装置,并把灯具当作电源,光线照射于测试屏幕,产生相应的光斑,接下来通过线阵CCD(电荷耦合器件),对光斑微元开展成像及取样,从下到上对屏幕开展采样。无论是器件还是测试屏幕,因为二者的位置是固定的,所以在进行采样时,所对应的面积微元,在把灰度值传到PC机的时候,通过PC机针对每一个像素点,根据位置开展标记,同时借助线阵CCD参数,对灰度值进行转换,以便能够形成照度,将其运用于光强分布计算[1]。CCD属于一种光电传感器,在其硬件部分中包含着较多的成分,例如光敏单元,在可以传递信息的同时,也能达到光电转换的目的,主要是用来采集以及采样光信号,图2所示为测量原理。
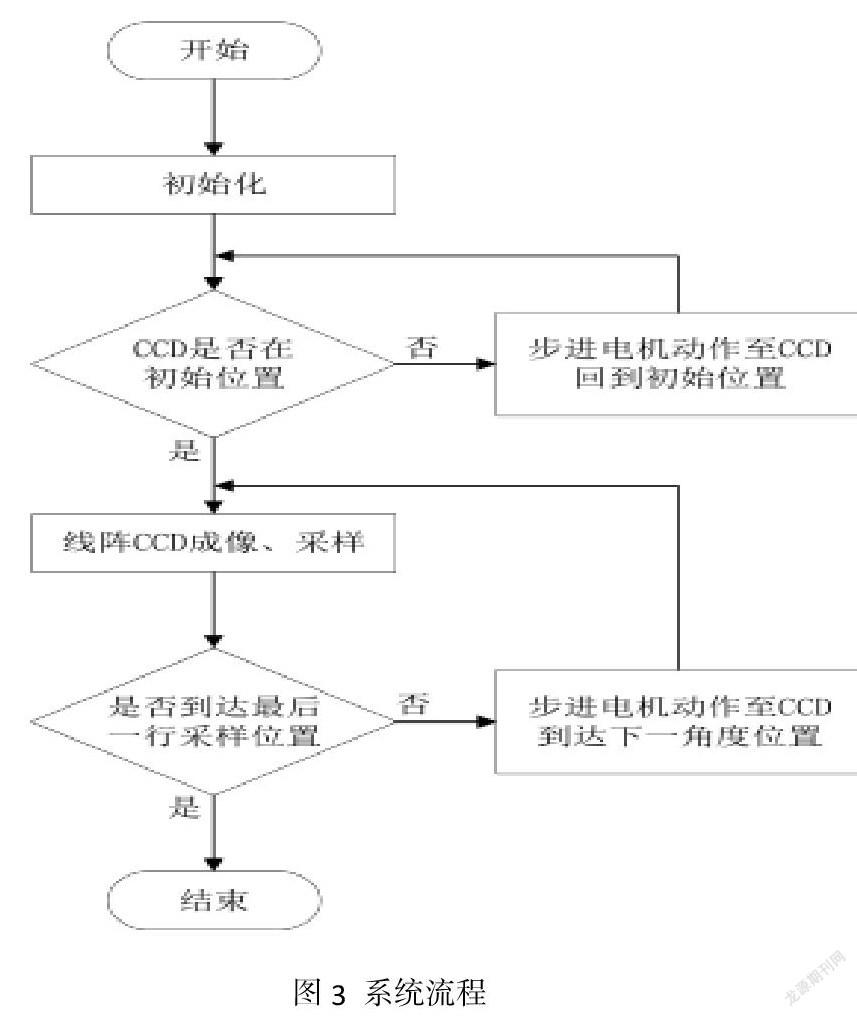
光线通过屏幕反射之后,借助光学系统的作用,成像于像敏单元,然后对光强进行转换,从而产生电荷包,同时通过驱动信号,形成电压信号输出。对于信号幅值来讲主要和两个变量有联系,一是光信号大小,二是照射时间。通过对CCD的使用,进一步来拍摄测试屏幕,并且产生相应的电信号,这样易于进行上传,而对于传输模块,就是用来暂存电信号,通过对PC机的利用,除了能够接收该信号,也可以实现存储,同时借助已有的参数,对该组信号进行转换,以便能够形成照度数据,结合驱动信号,判断步进电机需不需要动作,并且让CCD转向测量角度。图3所示为系统流程。
开展光强检测时,应当借助传感器收集强度,并在基础上对光强进行计算,当选取传感器时,CCD由于具备一系列优势,例如稳定性理想、成像所需时间短,从而被看成光度学传感器,而对于CCD一般主要有两类,也就是面阵以及线阵,基于对现场检测的考虑,对于检测系统来讲应当满足这样的条件,即方便、经济以及快速,与线阵CCD进行比较,面阵CCD需要投入更多的成本,并且在采样之后,数据偏多有碍于进行处理,因此选择线阵CCD[2]。为测试屏幕上的信号,当传至上位机的时候,朝着PC机传输有关的中断信号,表明采集已经结束,接下来通过PC机传输驱动信号,促使CCD到达测量角度。文章将把LED阵列当作例子,对光强检测开展探讨。
2.光强检测方法的确定
现如今针对助航灯具,關于对其光强的检测,一般可以选择两种方法,也就是传统检测以及在线检测。不过就前者而言,要对灯具进行拆卸处理,移到实验室里面,把灯具固定于转台,二者间确保一定的距离,也就是远场条件,接下来通过透镜等进一步来分束光线,针对探测元件光线,确保其属于空间角里的光束。把获取到的数据代进有关公式,基于某一空间角,就可以获取相应的发光强度。然后通过转台控制,进入既定的空间,通过不断重复这样的操作,就能够获取整个光强分布。对于这一种方法来讲,无论是转台控制还是检测空间,都有着相对高的要求,一般被运用于学校以及研究所等,检测所需周期相对长,需要投入较多的成本,伴随运转时间的延长,再加上航班密度的提高,若没有设置一定的备用灯具,此方法无法达到当班检测,并且也不易满足维护需求。
而对于在线检测,能够符合检测速度要求,不过无论是购买成本还是维护费用,都是相对高的。除此之外,近几年还诞生了光强检测装置,基于近场条件,可以实现光强检测,很大程度上节约了空间,并且存在着相对理想的测量度,不过当进行检测时,需对亮度数据开展积分,这样方可获取光强数据,不但费时间费精力,而且亮度计相对昂贵。本文给出这样的一种方法,即:基于近场条件,通过照度开展光强检测,把光源分成一系列子光源,同时设相应的光强分布,针对照度接收面所有点,算出有关的照度分布,和具体采集值实行对比,并及时反馈两者间的误差,对光强分布进行修正处理,让设计值趋近于实际值。
3.CCD及照度标定
当开展光强检测时,难以直接获取光强,一般情况下利用别的光度学参数进一步来实现,例如照度,由于选择光通量等,不得不积分以及分光,所需检测时间相对长、装置便携性不理想,所以选择照度参数,将其当作检测量,在此基础上算出光强分布。对于照度数据的获取,因为基于近场条件开展测量,所以需要点间隔相对近,就普通元件尺寸而言,难以符合阵列间距需要,所以选择CCD,将其当作照度接收元件[3]。基于近场设计一定的发射光,通过CCD促进光斑成像,然后针对全部像素的灰度值进行转换,从而形成相应的照度值。
4.光强计算方法
就光源的发光强度来看,其分布一般是把光源当作点光源,它的分布特征同空间角存在很大的联系,而实施上根本没有真正的点光源,通常情况下,若是探测元件与光源的距离相差较远,会让其反比定律接近满足,把光源看成点光源,其作用条件是远场条件,在进行光强检测时,是比较常见的传统方法。若是距离条件不能满足时,可将其看作近场条件。一般来讲,其探测距离应超出光源的五倍,建议将光强测量误差控制在5%上下,从而构建远场条件。在进行工作时,飞行员可将助航灯具看作点光源。针对发光面比较大的光源,对于现场灯具的运用,若是不进行拆卸及移动,需进行大规模的移动及采样,利用该方法获得面光源光强分布是存在一定难度的,对此需综合分析近场环境下,开展光强检测工作,同时借助近场的一系列计算,对灯具远场光强分布进行推导。
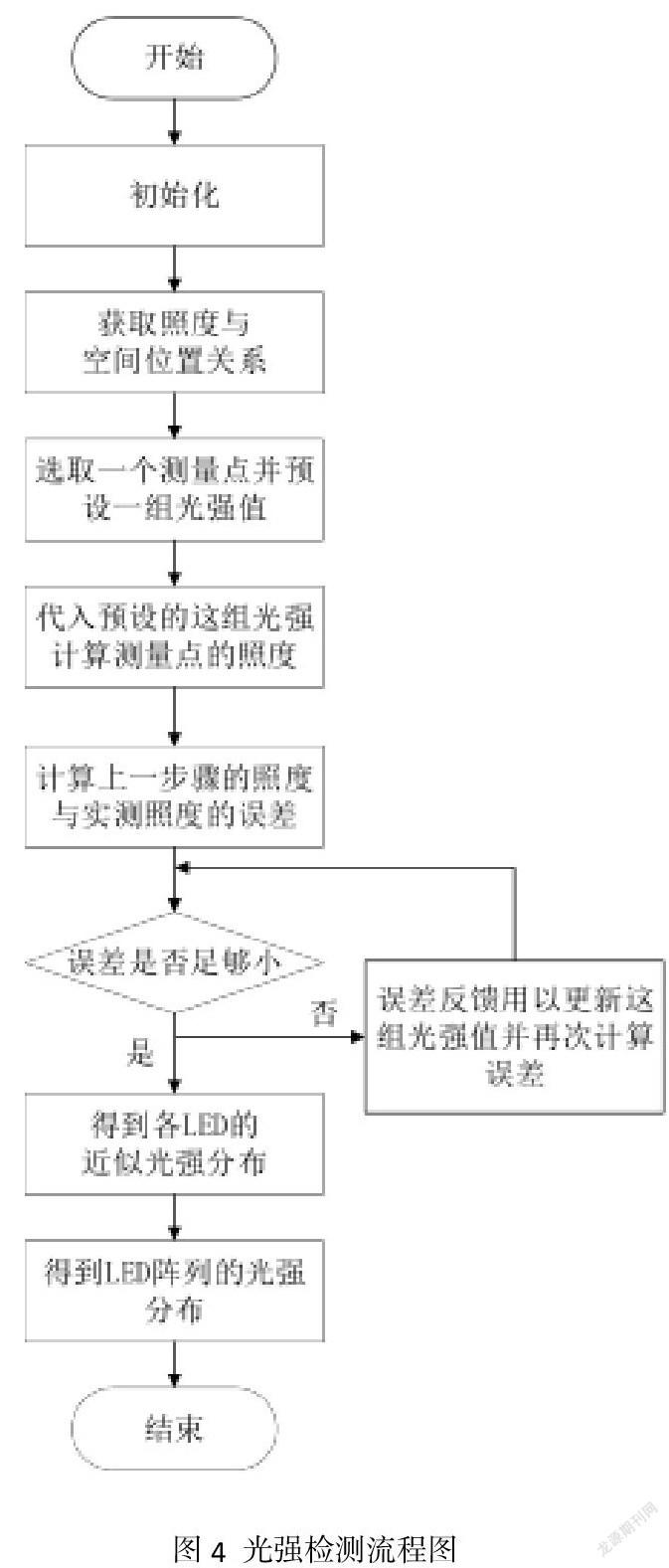
在灯具利用现场,由于全部LED形成一个整体,难以借助单个光强分布,针对阵列面光源,获得与之相关的光强分布,对于每一个LED,不知道它们的光强分布状况,并且就这个时候测量点而言,其照度值属于叠加和,因此难以开展光强计算。面对这样的情况,基于照度误差,文章给出这样的一种方法,即:在近场区域内选择合适的平面,将其当作测量平面,借助照度探头开展移动以及采样,从而获取相应的照度,接下来预设光强分布,在此基础上对平面照度进行计算,获得有关数值之后,与实际照度开展对比,同时算出存在的误差,并及时反馈这样的误差,以便对光强分布进行更新,在误差足够小的情况下,能够获得近似光强分布,随之可以获得空间光强分布。图4所示为光强检测流程。
结论:针对光强检测系统,文章阐述了其硬件构成以及检测流程,着重探讨了测量元件CCD,基于近场条件,分析了通过照度开展检测的难点,基于照度误差,给出了一种行之有效的方法(如上文所述),借助照度和空间位置关系,可以获取近似光强分布。
参考文献:
[1]马秉正. 基于共轭成像技术的助航灯光强检测方法研究[D].中国民航大学,2020.
[2]罗杨. 基于共轭梯度法的环形组织阻抗成像技术研究[D].重庆邮电大学,2017.
[3]王智鹏. 时序拼接光学合成孔径成像技术研究[D].中国科学院大学(中国科学院光电技术研究所),2017.
