基于单片机的智能小车的设计与制作
2021-09-10刘丹妮朱凯
刘丹妮 朱凯


摘要:智能小车由STC89C52为核心,并且使用一台单片机来控制l298N电机的驱动模块并可以直接控制一辆智能驾驶小车。它利用超声波传感器来准确地识别道路上的障碍物并进行避障。它是使用红外线传感器来检测路径轨迹,并将被检测的信号回放到单片机以便实现追踪功能通过判断和分析单片机采集的信号并控制驱动马达以使得智能小车具备转向功能,智慧小车可以避开前方的障碍物,沿着路径行走并自动跟踪和躲避其他障碍物,来完成对智能小车的转向和避障。
关键词:单片机;智能小车;避障;寻迹红外
1、主控系统
STC89C52是一款采用带有高性能且低驱动功耗的8元的CMOS系列微控制器。它们还拥有一个可以内置于8K素微控制器接口中的32位可编程图形闪存。STC89C52使用了一个传统级的MCS-51内核;但是,为了能够繼续努力保持这种传统51单片机所可能没有的数位芯片设计特点,已经对其性能进行了许多新的改善,STC89C52是一个同时具有一种智能8位闪存处理器和一个系统级的可编程数位闪存设计特点的数位单芯片,为许多其他数位应用者系统提供了非常灵活和高效的软件解决模式方案,系统可以集成许多控件[1]。
一、复位操作
复位操作就是对微控制器进行的初始化。它的主要目标之一就是将pc初始值变成0000h,以便于微控制器自0000h单元起就可以执行该程序。除了需要启动正常的系统初始化以外,如果一个系统因程序的执行或者操作错误而自动崩溃,您还可以按下重新启动或者清除系统中的按钮。
二、复位信号及其产生
由两个集成模块一起组成此次功能复位的集成电路,那么它们就是一个芯片内部和就是芯片外部。外部复位电路所连接产生的一个内部复位检测信号(RST)同时发送给施密特触发器,并且片上的一个复位检测电路在每一块板的S5P2上板中都会同时显示施密特触发器的一个输出,以便于检测内部的一个复位电路操作。有两种方法使用户可以进行相位重置的过程:手动重置一个相位的按钮,以在其上电时自动进行相位重置,通过向外部的相位重置电路充电,可以在上电时自动重置。这就说明只要VCC功率的上升持续时间不可能超过1ms/秒,机器循环以在开机时获得自动重启。手动复位的工作方式主要有以下两种:第一种采用的是电平模式,而第二种采用的就是脉冲模式[2]。
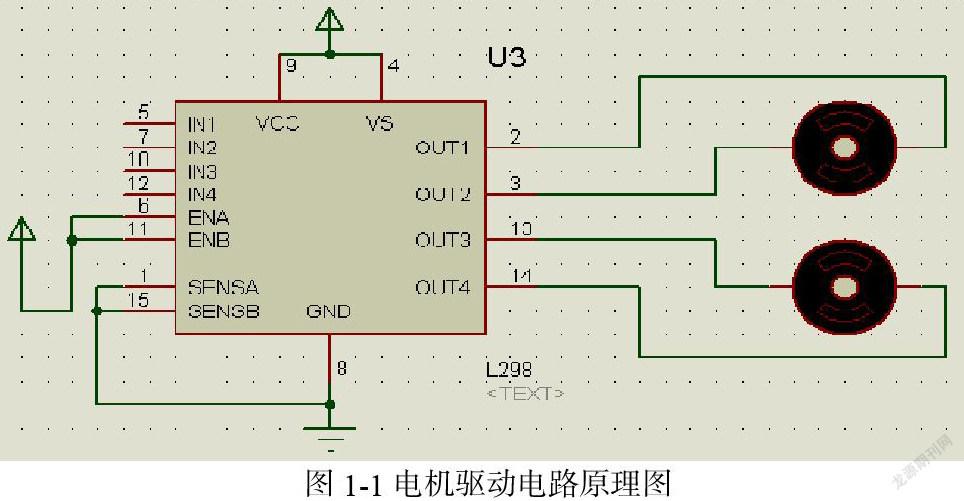
2、电机驱动与避障模块
功率控制晶体管信号可以直接用来控制作为一个直流功率信号放大器的一个输入,以用来控制一个直流电的发动机。线性驱动电路,不仅加速强,而且构造简略不复杂,加速的能力也很不错。使用由达林顿管制成的H桥电路。
两对红外灯管分别布置在车身前部和轨道的各一侧。根据接收黑线和白色光电的两个开关进行选择,控制轿厢方向以设置轿厢方向。测试结果表明,只要正确地安装了光电开关的位置,就可以提供足够的跟踪能力。
3、硬件设计
使用前驱作为智能型小车进行驱动,前轮的左侧和右侧由一台电动机进行驱动,并通过调节其前轮速度以便于启动和停止来控制方向。后轮是通用的支撑轮。把左右两根光电耦合管分别放置于身体下方。此时,当位于车辆底部左侧的传感器被检测为黑线,主控制芯片将命令左轮马达停止,然后车辆再次向左进行校正。此时,当汽车右下方的传感器被检测至黑线位置时,主控制芯片将命令右轮马达停转,汽车则向右下方进行校正。
避障原则与追赶原则相同。一对光电管安装在主体的右侧。当检测到障碍物时,主控制芯片会发出信号并警告车辆正在倒转并避开障碍物。
小型直流发动机的专用驱动器,l293芯片是采用的方式是一个集成H桥电路。它的输出电流范围为1000mA,最大输入电流范围为2A,最大的工作电压范围为36V,具有很强的实用性,因为它能够控制单片机的电感负载,特别是它可以连接到一个单片机的两个输入端。由微控制器很方便的控制。
4、信号检测模块及主控电路
当智能小车行驶到路线内时,会通过检测路面反射光线的大小来判断并监控,因为路面上有不同的反射大小系数。在信号检测模块中,运用了红外探测,这种检测方法应用非常广泛,红外探测会采集红外线检测到的不同物体的反射特性,简单可靠,而且它会持续地放射红外线。这便是智能小车的监控原理[3]。
主控电路的主要功能是对已经采集到的信号进行检测分析,并且要计算和控制电机的运行速度,以及起动和停止。检测障碍的功能也受到它的控制以及报警功能。
5、结语
本文系统设计是基于单片机和传感器原理,以STC89C52单片机为主控芯片,采用L298N和12V直流电机为驱动元件,通过软件编程制作了一整套结构完整,功能模块化,反应较为灵敏的超声波避障小车。经过对该避障小车的避障测试实验,实验结果证明该避障小车能够很好的按照预期完成避障动作,并且能够快速运动灵敏避障,效果良好,运行稳定性较好。
参考文献
[1]陈红梅.浅谈多传感器信息融合技术[J].科技信息,2012(18):33-34.
[2]洪淼淼.蔡宁.基于STC89C52的智能小车[J].电子世界.2016(11):41-42.
[3]卢威.智能小车避障系统的设计与实现[D].南昌大学,2012.
