基于北斗/4G的小型通信装置设计
2021-09-10马路平王英立于邦伟夏纪洋刘珂鑫王浩淼
马路平 王英立 于邦伟* 夏纪洋 刘珂鑫 王浩淼
1.哈尔滨理工大学学生创新实验室,黑龙江哈尔滨 150000;2.哈尔滨理工大学测通学院通信工程系,黑龙江哈尔滨 150000
0 引言
传统的车载定位系统价格昂贵,有时定位不准,并且用户无法直接查看设备的运行状态。在传统的定位设备应用场景下,经常会有司机因无法自检,不知道设备失灵而受到相关处罚。如果能开发出一种可以自己检查设备是否失灵,并且可以将位置信息通过短信发送至用户手机的设备,将给用户带来极大的方便。本设计以STM32为主控芯片,结合北斗模块和4G模块实现了定位和通信功能;结合红外模块和超声波模块实现了避障功能。
1 系统方案
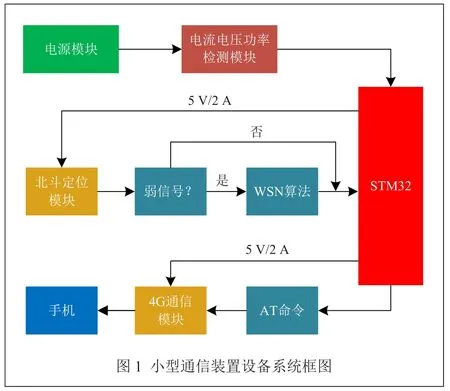
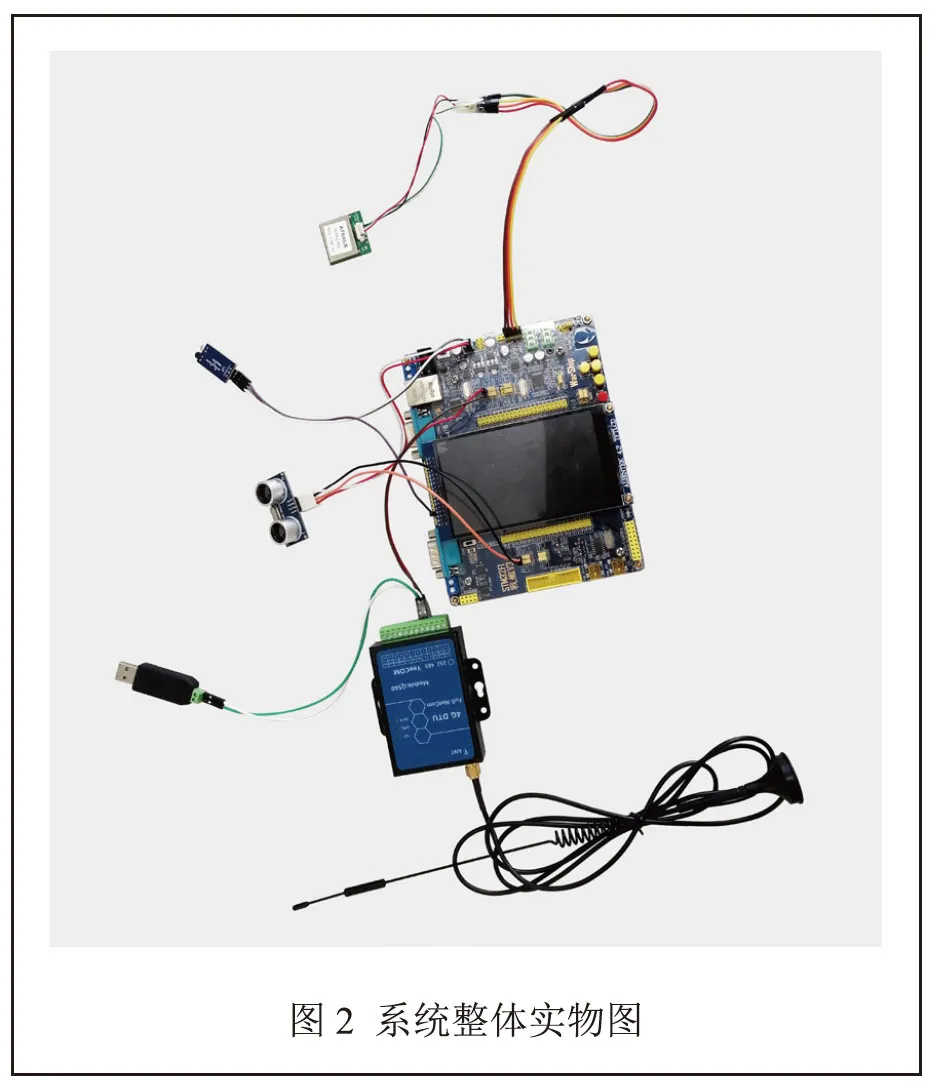
小型通信装置主要由电源模块、卫星定位模块、4G通讯模块、超声波模块以及红外模块组成。当需要获取目标装置信息时,卫星定位模块将获得的目标位置信息传送给CPU,4G模块按照CPU指令将目标位置信息发送给手机。避障模块由红外模块和超声波模块组成,当避障模块检测到障碍物时,将障碍物信息传送给CPU,CPU按照既定程序发出相应指令。设备整体结构如图1所示。主控模块CPU用来接收、处理其他模块采集到的信号;4G通讯模块用来发送经CPU处理过的数据到目标手机。系统整体实物图如图2所示。
系统设计以下功能:
(1)系统可即时获取目标设备位置信息并发送至目标手机;
(2)系统可以自行躲避障碍物。
2 系统设计
2.1 单片机最小系统
单片机最小系统主要由主控芯片、功率调节器、串口通信电路、按键、LED灯组成。
本次设计采用的主控芯片是STM32F1系列芯片,具有高速率、低成本、低功耗、耐用等优点[1]。
2.2 电源模块
电源模块采用大容量、高性能的镍锂电池给整个系统供电,输出电压为5 V,最大输出电流为5 A,可满足4G发射时的最大电流(2 A)和北斗-GPS发射时的最大电流(2 A)的需求[2],额定容量14,000 mAh。稳压模块通过检测电压电流值,将数值传输到STM32,STM32再根据修正值控制调压器调压。
2.3 定位模块
本系统采用ATK1218-BD模块进行定位。该模块定位精度高,冷启动时间短,通信速率高,尺寸小,与NEO-6M模块相比,具有成本低、GPS+北斗双模、更新速率快等优势。
无线传感器网络技术(wireless sensor network,WSN)是物联网技术的一种,是综合了包括传感器技术、现代网络技术及无线通信技术在内的多种技术于一体的感知及传输系统[3]。WSN算法是在定位唯一性约束关系下能够求解网络中任意节点位置的一种有效算法。
2.4 4G通讯模块
本系统采用QUECTEL EC20 CEHDLG作为通讯模块,该模块采用LTE3GPP Rel.11技术,支持的最大下行速率为150 Mbps,最大上行速率为50 Mbps,同时在封装上兼容EC20 R2.1 Mini PCle-C模块,并能够向后兼容现存的EDGE和4G/GPRS网络,以确保在缺乏3G和4G网络的偏远地区也能正常工作。通过AT指令集实现4G全网通的各种功能,4G通信模块需要外接SIM卡才能实现数据远程传输,经UART接口与STM32处理器连接后可以实现与主控板间的近距离数据传输。
由于该模块可以实现4G通信,所以可通过短信方式获取当前设备的位置信息。在需要自查设备故障时,通过AT命令获取本设备的位置信息与实际情况对比,即可判断系统是否发生故障。
2.5 避障模块
本系统采用红外模块和超声波模块进行避障,具有较高的准确度,并且容易实现。在设计上采用红外避障模块与超声波模块,2种方案同时检测,并依据两者测得的距离为转向角提供数据[2]。
2.5.1 红外模块
红外模块具有信号发射二极管与信号接收二极管,发射管发射一定频率的红外信号,接收管接收这种信号,红外信号遇到障碍物被反射到传感器接收头,传感器检测到这一信号就可以确认正前方有障碍物[4]。经过处理后,通过数字传感器接口返回到主机,主机即可利用红外波的返回信号来识别周围环境的变换,进而做出判断。
2.5.2 超声波避障模块
超声波电路采用集成电路CX20106A[5]。超声波测距模块的超声波频率为40 kHz。该模块具有很高的灵敏度和较强的抗干扰能力,可以适当改变C1的大小,从而改变接收电路的灵敏度和抗干扰能力。电压放大倍数随测距距离的增大呈指数规律增加,使接收回波的幅值保持恒定或者仅在较小范围内变化,再经过整形电路输出,可大幅度地提高测距精度[5]。
3 系统工作流程
系统工作流程如图3所示。开机后,STM32F1单片机主控芯片、4G通信网络、卫星定位模块系统初始化,当需要知道当前目标设备的位置信息时,CPU通过读取卫星定位模块位置信息,然后通过4G通信模块发送AT命令给SIM卡(手机),当避障模块检测到有障碍物时,反馈数据给CPU,然后CPU根据数据给出相应的避障命令。

4 数据测量
本系统运行所得关键数据为位置与速度信息。测试用的上位机为naviTrack,可以测量当前位置能够接收卫星信号的数量、经纬度、速度等信息。经多次实验,最终在哈尔滨理工大学校内4个不同位置测量并记录了相关信息。上位机获得的数据如图4~图7所示。





5 避障实验
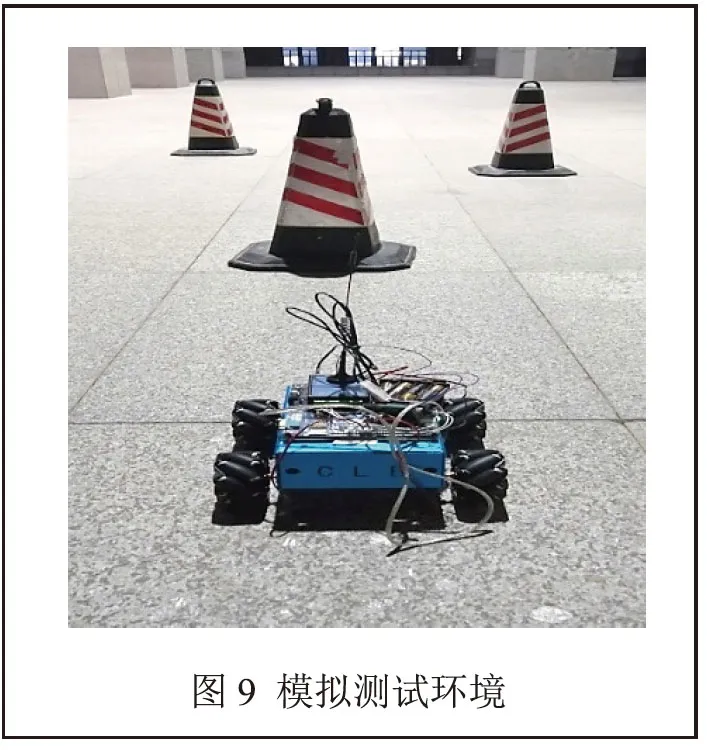
小车实物如图8所示。测试小车避障功能,构建一个模拟环境,如图9所示。将小车放入起点位置,使小车匀速前进,测试小车成功躲避障碍物的次数N以及每次成功到达终点所用的时间T,本次实验测试10次,并记录实验数据,实验结果如表1所示。

表1 实验结果
10次避障实验中,小车有7次成功躲避障碍物,到达终点,3次失败,从测试时间来看,小车从起点到达终点的时间大概在50 s左右。
6 总结
基于北斗/4G技术的小型通信装置,以STM32F1单片机为主控制器,以ATK1218-BD为定位模块,4G网络为通信载体,实时监控目标装置的位置信息,实现了目标位置随查随知。系统还配备了红外模块和超声模块组成避障模块,实现了基础的避障功能。经过测试,系统操作简单,比较稳定,成本低。今后将在提高避障的精确度方面进一步改进。
