混联机械臂系统自适应选择迭代学习角同步控制
2021-09-10黄志来徐培民
周 吉,万 鹏,黄志来,徐培民
混联机械臂系统自适应选择迭代学习角同步控制
周 吉1,2,万 鹏3,*黄志来1,2,徐培民1,2
(1.特种重载机器人安徽省重点实验室,安徽,马鞍山 243000;2.安徽工业大学机械工程学院,安徽,马鞍山 243000;3.马钢(集团)控股有限公司,安徽,马鞍山 243000)
建立了四自由度混联机械臂系统动力学模型,并根据系统重复运动和具有不确定因素的特点,设计了自适应选择迭代学习同步控制算法(ASILSC),实现了系统的角同步运动,并证明控制算法的收敛性。仿真结果表明,相比于带遗忘因子的迭代学习同步控制,自适应选择迭代学习角同步控制有更好的收敛性和鲁棒性。
混联机械臂;自适应选择;迭代学习;同步控制;
0 引 言
串联机械臂和并联机械臂组合而成的系统称为混联机械臂系统[1],它结合了串联机械臂灵活性好[2]和并联机械臂承载能力强[3]的优点,广泛应用于物品搬运、零件抛光和焊接等重复性工作[4]。
针对重复运动的系统,1984年Arimoto[5]首次提出了迭代学习控制(Iterative learning control,ILC)算法,通过学习之前的反馈误差信息修正后续重复运动,达到了控制目标。ILC相较于其它智能控制,具有严格的数学证明[6]。史建涛等[7]使用ILC来保证机械臂系统跟踪误差的有界性。乔建忠等[8]面对机械臂模型不确定性和连杆振动问题,利用ILC实现了机械臂的轨迹跟踪。
由于混联机械臂系统本身在设计、制造或装配等环节都会产生误差,导致系统处于不良的工作状态[9]。自适应控制(adaptive control,AC)算法针对这种不确定因素的系统有着很多研究[10-11]。综合利用两种算法的优点,可以实现四自由度混联机械臂系统的角同步运动。
本研究首先建立四自由度混联机械臂的数学模型,以此作为被控系统;然后,将控制器在ILC的基础上与AC相结合,构造了一种自适应选择迭代学习角同步控制器(adaptive switching iterative learning angle synchronous control,ASILSC),并证明控制器的收敛性;最后通过仿真算例验证控制效果,为混联机械臂系统的角同步控制问题提供新思路。
1 系统动力学模型
本设计使用的四自由度混联机械臂系统如图1所示。因系统中各机械臂刚度较大,故可忽略其形变,将各机械臂均视为刚体。机械臂1(3)和机械臂2(4)经由连接轴B(E)相串联,由机架轴A(D)连接到机架上。将两个二级机械臂一上一下安装在同一铅垂面内,并共用同一机架,则与机架相连的两个机械臂(如图1中的机械臂1和机械臂3)构成并联关系,从而组成本文的混联机械臂系统。设第个机械臂长度,重心位置,姿态角,转动惯量和质量分别为l,d,q,J和m(=1, 2, 3, 4)。
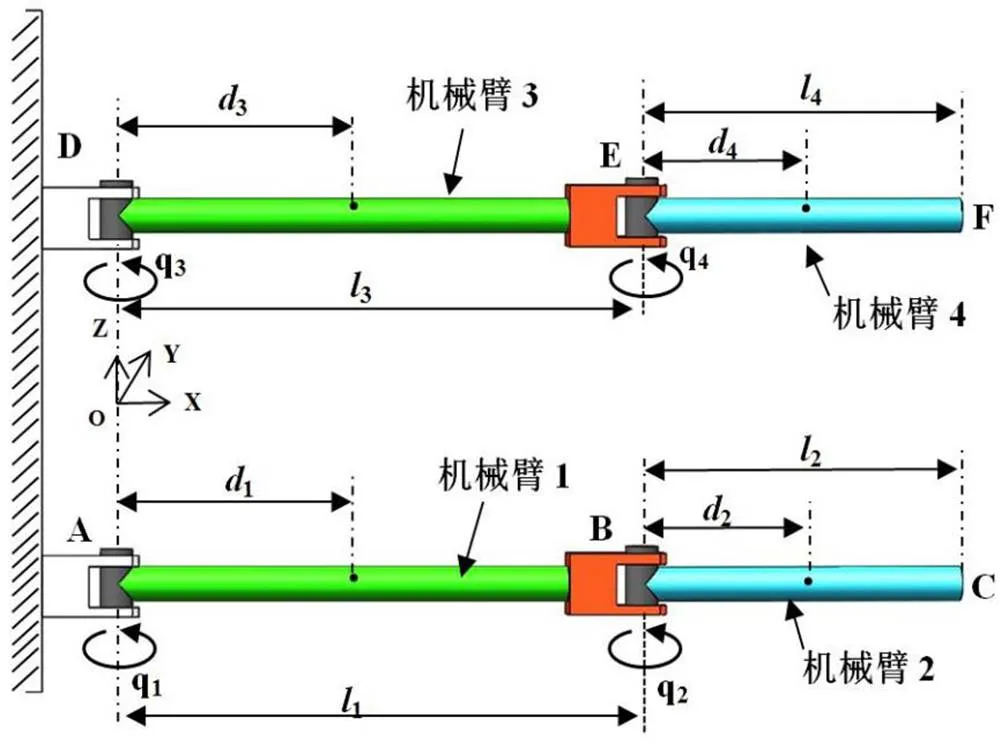
图1 四自由度混联机械臂系统
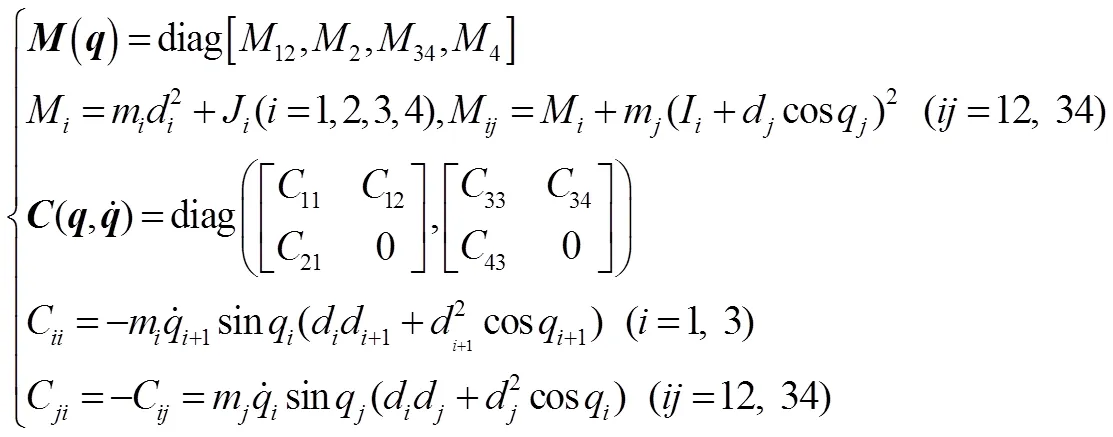
由拉格朗日法得到动力学方程为

其中
方程(1)有如下假设:
同时满足如下性质:
2 自适应选择迭代学习同步控制
2.1 同步控制律


自适应选择律为

2.2 收敛性分析
下面先对动力学方程式(1)进行线性化,在此基础上,将以状态变量表示的系统方程转化为以误差变量表示的系统方程,最后做收敛性分析。
2.2.1 动力学方程线性化

由于

则

同理

由式(7)和式(8)可得

其中,



由式(3)、式(4)可得

定义

将式(14)、式(4)代入式(3)可得




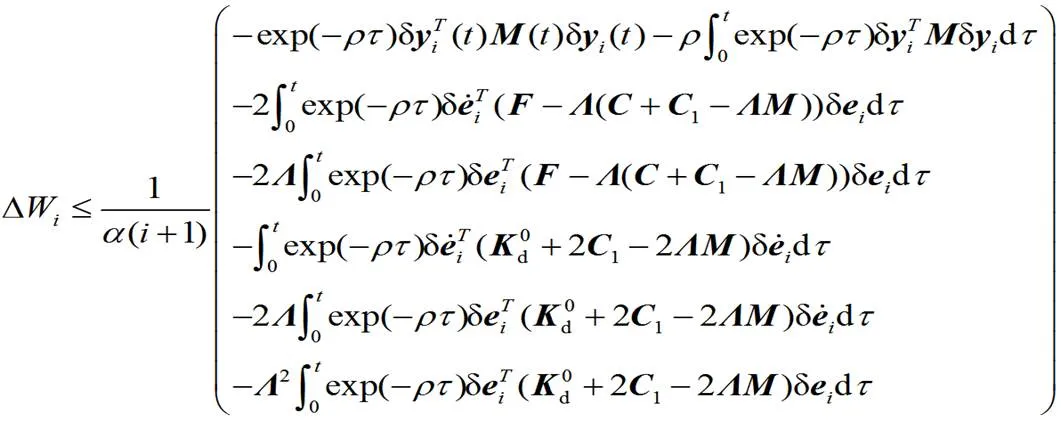
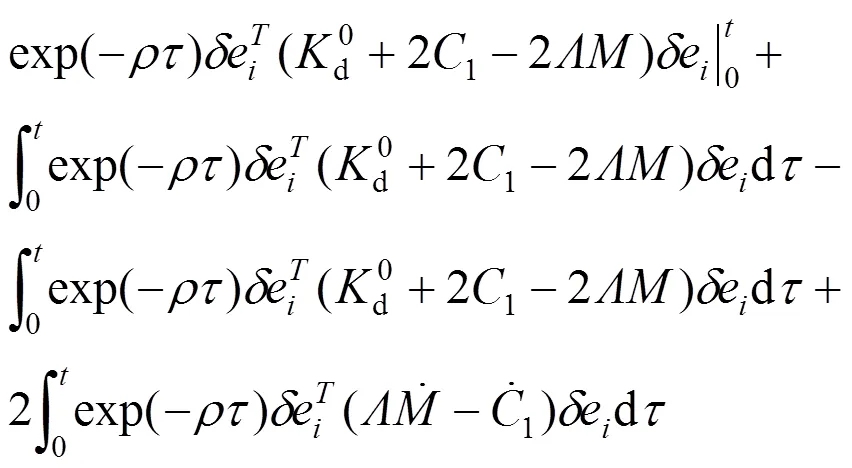
2.2.2 收敛性分析
收敛性分析如下,定义Lyapunov函数为

由式(16)得到

由式(12)得到

由式(19)、式(20)得到


因为

则由式(22)和式(23)可得





由系统特性二可得

则

由于


因此


其中



采用Cauchy-Schwart不等式,有


3 仿真算例
取四自由度混联机械臂(图1)系统进行仿真,使用自适应选择迭代学习控制如式(3)所示,控制系统如图2所示。

图2 ASILSC控制系统图
从图3的轨迹图(a)和(b)看出,两种控制器均实现了轨迹跟踪,同时轨迹误差较小。从跟踪误差图(c)至(f)看出,ASILSC的跟踪误差和角同步误差的波动范围和稳态值较小,均小于ILSCFF。通过与ILSCFF对比发现,ASILSC有着较好的抗扰性能,同时误差的波动范围和稳态值较小也能体现出ASILSC具有更快的收敛速度。

4 结论
通过建立四自由度混联机械臂系统动力学模型,设计了自适应选择迭代学习角同步控制算法,证明了其收敛性。仿真结果显示,ASILSC具有良好的轨迹跟踪和角同步运动的控制性能,并且有着较好的抗扰性能。协同合作能使多个性能较弱的机械臂完成单个高性能机械臂无法完成的任务,若ASILSC的控制目标为协同轨迹,就能从角同步控制迁移至协同控制,为多机械臂协同合作奠定基础。
[1] 万鹏,田汪洋,周吉,等. 混联机械臂系统带遗忘因子的迭代学习角同步控制[J]. 东莞理工学院学报, 2020, 117(3):113-117.
[2] Nayak A, Caro S, Wenger P.Kinematic analysis of the 3-rps-3-spr series-parallel manipulator[J]. Robotica, 2019, 37(7):1240-1266.
[3] Ramkumar R, Karthikeyan C, Dash AK.A new workspace analysis method for 6-DOF 3-RRRS parallel manipulators[J]. International Journal of Robotics & Automation, 2019, 34(2):135-145.
[4] Lu Y, Dai Z, Lu Y.Precise stiffness and elastic deformations of serial-parallel manipulators by considering inertial wrench of moving links[J]. Robotica,2020,38(12):2204-2220.
[5] Arimoto S. Bettering operation of robots by learning[J]. J of Robotic Systems,1984, 1(2):123-140.
[6] Shida G, Jun L, Cuimei B, et al. Parameter optimised iterative learning control algorithm for multi-batch reactor[J] . The Journal of Engineering, 2019(22): 8319-8323 .
[7] Shi J T, Xu J X, Sun J, et al.Iterative learning control for time-varying systems subject to variable pass lengths: Application to robot manipulators[J]. Ieee Transactions on Industrial Electronics, 2020. 67(10):8629-8637.
[8] Qiao J Z, Wu H, Zhu Y K, et al.Anti-disturbance iterative learning tracking control for space manipulators with repetitive reference trajectory[J]. Assembly Automation, 2019, 39(3):401-409.
[9] 张朝君. 新型串并混联机械手的设计[J]. 内燃机与配件, 2019(5):213-214.
[10] 郭丁旭, 姜乃晶, 张舒,等. 含有LuGre摩擦并联机械臂的自适应控制[J]. 动力学与控制学报,2019,73(17):72-78.
[11] Chen Q, Shi H H, Sun MX.Echo state network-based backstepping adaptive iterative learning control for strict-feedback systems: An error-tracking approach[J]. Ieee Transactions on Cybernetics,2020,50(7): 3009-3022.
ADAPTIVE SWITCHING ITERATIVE LEARNING ANGLE SYNCHRONOUS CONTROL FOR HYBRID MANIPULATOR SYSTEM
ZHOU Ji1,2, WAN Peng3,*HUANG Zhi-lai1,2, XU Pei-min1,2
(1. Key Laboratory of Special Heavy Load Robot of Anhui province, Maanshan, Anhui 243000, China;2. Anhui University of Technology School of Mechanical Engineering, Maanshan, Anhui 243000, China;3. Magang (Group) Holding Company Ltd, Maanshan, Anhui 243000, China)
The dynamic model of the four-degree-of-freedom hybrid manipulator system was established. According to the characteristics of the system’s repeated motion and uncertain factors, the adaptive switching iterative learning angle synchronous control (ASILSC) was designed to achieve the angular synchronization of the system. The convergence of the control algorithm was proved. The simulation results showed that compared with the iterative learning synchronization control method with forgetting factor, the iterative learning synchronous control method based on adaptive switching had better convergence and robustness.
hybrid manipulator; adaptive switching; iterative learning; synchronous control
TP241
A
10.3669/j.issn.1674-8085.2021.03.0014
1674-8085(2021)03-0079-06
2021-01-23;
2021-02-17
周 吉(1994-),男,安徽马鞍山人,硕士生,主要从事动力学与控制研究(ji_zhou7@foxmail.com);
万 鹏(1995-),男,安徽马鞍山人,硕士,主要从事动力学与控制研究(peng-wan@foxmail.com);
*黄志来(1983-),男,湖南娄底人,讲师,博士,主要从事动力学与控制研究(zhilai_huang@foxmail.com);
徐培民(1960-),男,陕西礼泉人,教授,博士,主要从事机械振动与控制研究(xupeimin@ahut.edu.cn)
