修正Kalman滤波技术在复杂环境DVL标定中的应用研究
2021-09-08郭新江
尚 佳,郭新江
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
声学多普勒计程仪(Acoustic Doppler Velocity Log,DVL)是利用多普勒效应原理,通过估计海底/水声学散射信号的多普勒信息,测量平台对底/水三维速度的一种精密仪器,广泛应用于水中装备、水下作业、海洋观测、舰船导航等领域,是现代水下自主导航系统的重要组成[1-4]。在实际工程应用过程中,由于受机械加工、平台安装等误差因素影响,造成DVL测量坐标系与载体坐标系之间存在安装偏角、DVL测量值与真值之间存在比例因子,这些是水下自主导航精度的主要误差源,需要进行误差预标定。
目前的标定方法多是在DVL测速噪声为高斯分布假设下,利用最小二乘、罗德里格、奇异值分解等方法进行标定[5-9]。然而任何声呐性能均与应用环境密切相关,DVL测速质量易受到平台、海洋等环境因素影响,在某些恶劣条件下,如长江三峡、湖北水布垭等试验水域,部分航段异常值多、测速噪声统计特性偏离高斯分布,严重影响标定效果。因此,如何提高误差标定的稳健性和作业效率是批量应用中迫切需要解决的实际问题。本文着重针对复杂环境下 DVL标定问题,提出采用修正Kalman滤波对非高斯测速噪声加以抑制,弥补标准Kalman滤波在数据预处理方面的不足,扩展现有标定方法适用范围,为工程应用提供指导。
1 测速数据分析
Levy分布具有“尖峰肥尾”的形状,可以分解为一个高斯白噪声和一些大值样本2部分;在平台摇摆、地势起伏等幅度较大情况下,DVL测量结果中会出现大异常观测值,测速噪声可认为是由正常观测的高斯噪声与异常样本组成,符合 Levy分布特点。
结合国产HEU150型DVL在长江三峡应用为例,以GPS速度为真值,DVL速度减去GPS速度获得的测速噪声为研究对象,分别采用直接曲线拟合、高斯分布拟合和Levy分布拟合方法对约2万个测速样本的统计特性进行分析。对于地势相对平坦的非复杂作业环境,图1为DVL和GPS输出速度曲线;图2为噪声统计特性,其中高斯分布的拟合参数为 N(σ=0,σ2=0.087),Levy分布的拟合参数α=1.8,C=0.01,β=0.053,δ=0。可以看出:在相对理想环境下,实际噪声统计特性可用高斯分布近似描述。对于地势相对陡峭的复杂作业环境,图3为某地势陡峭航段的DVL和GPS输出速度曲线,由于该航段两侧地形最大起伏超过30°,导致部分区间测速异常值明显,DVL测速噪声明显不符合高斯分布;图4描述了实证数据的噪声统计特性,为了达到最佳拟合效果,本文将高斯分布的拟合参数设为 N(σ=0,σ2=0.387 6),Levy分布的拟合参数设为α=1.23,C=0.11,β=-0.037,δ=0.043,可以看出:实际噪声概率密度函数的尾部比相同均值和方差的高斯分布更厚,进一步说明了实际噪声不符合高斯分布。且如果将高斯分布的σ值调小,使其峰值与实际噪声的概率密度匹配,则高斯分布的数据分布会更加集中,其数据范围还是从分布范围的角度观测,Levy分布显然能够更加精确地拟合噪声样本数据。另一方面,如果选用尾部厚度及峰值均与实证更加相似的Levy分布,标准Kalman滤波的精度和稳定度则得以更好的保证,因此本文选用Levy分布来更准确地适配实际噪声分布。

图1 非复杂作业环境下测速样本Fig.1 Velocity measurement sample in non-complex working environment

图2 非复杂作业环境下样本噪声统计特性Fig.2 Statistical characteristics of noise samples in non-complex working environment

图3 复杂作业环境下西陵峡某航段测速样本Fig.3 Velocity measurement sample of a section of Xiling Gorge in complex working environment

图4 复杂作业环境下样本噪声统计特性Fig.4 Statistical characteristics of noise samples in complex working environment
2 基于Kalman滤波的测速数据预处理
2.1 标准Kalman滤波
卡尔曼滤波(Kalman filtering)是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态在最小均方误差准则进行最优估计的算法[10]。设线性离散系统的状态和量测方程分别为
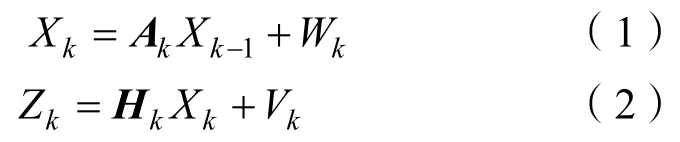
式中:Xk为状态量;Ak为状态转移矩阵;Wk为状态噪声;Zk为量测值;Hk为测量矩阵;Vk为测量噪声。若Wk和Vk满足
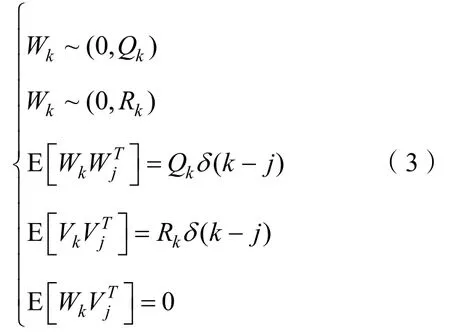
则Kalman滤波处理流程如图5所示。然而根据测速噪声统计分析结果,非高斯Levy分布更适合对复杂环境测速噪声描述,限制了标准 Kalman滤波应用效果。
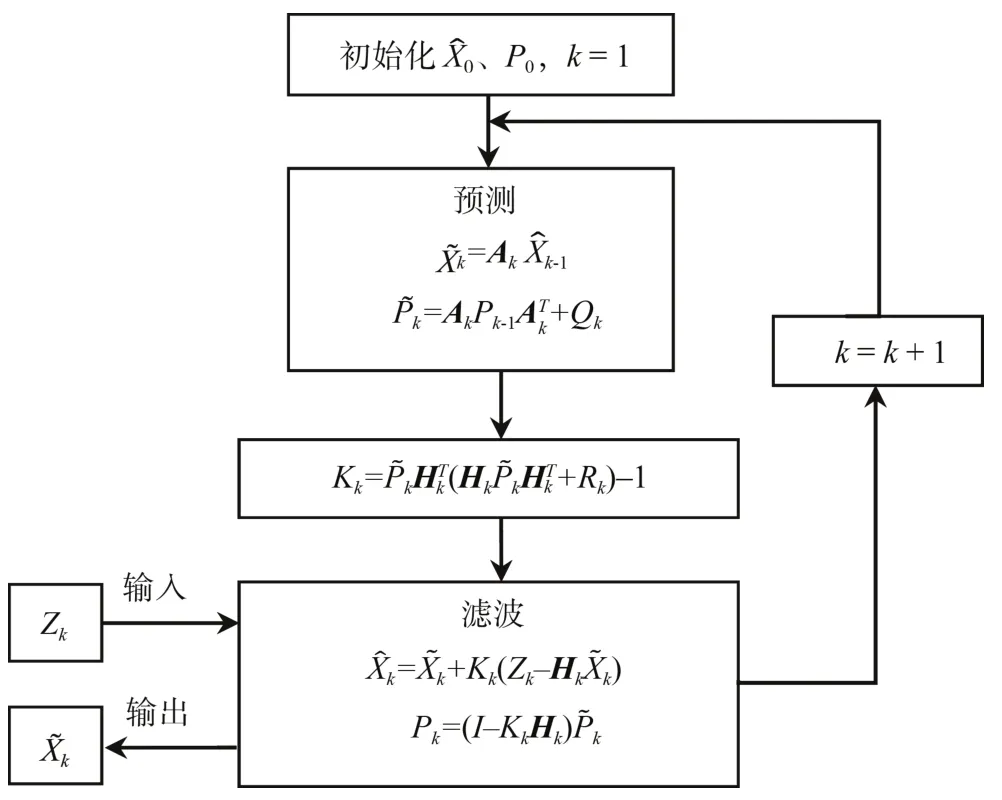
图5 标准Kalman滤波处理流程Fig.5 Standard flow of Kalman filter processing
2.2 修正Kalman滤波
修正 Kalman滤波是通过门限来剔除野值样本,将服从Levy分布的噪声转化为高斯噪声;在此基础上,通过实时估计测量噪声方差来改变滤波增益,以减小异常数据对Kalman滤波的影响,其处理流程如图6所示[11-13]。

图6 修正Kalman滤波处理流程Fig.6 Flow of modified Kalman filter processing
仍以图1-2样本为例,标准Kalman滤波和修正Kalman滤波预处理效果如图7-8所示,可以明显看出:修正 Kalman滤波预处理方法效果最优,野值数据得到有效剔除;而标准 Kalman滤波无论是在野值剔除方面,还是数据实时跟踪上均出现不同程度的错误结果,这会严重影响标定效果。
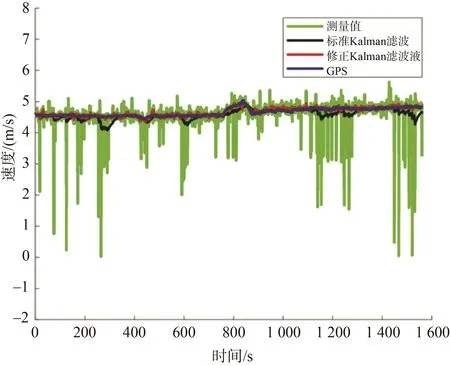
图7 修正Kalman滤波预处理结果Fig.7 Modified Kalman filter preprocessing results
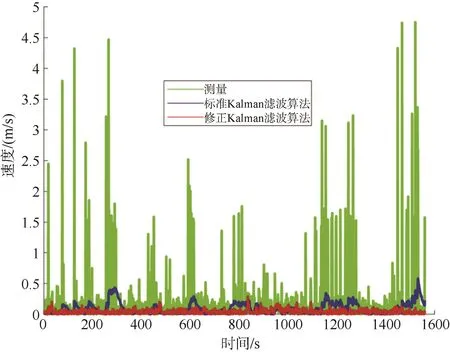
图8 估计误差Fig.8 Estimation error
3 标定试验
3.1 标定过程
为验证基于修正Kalman滤波预处理的外场标定效果,本文采用经典平均速度法进行安装偏角和比例因子标定。HEU150型 DVL的标称精度为5‰±2 mm/s,为分体式结构设计;换能器通过升降平台刚性悬挂在船舷侧,为减小杆臂效应影响,将GPS接收天线架设在升降平台顶端,标定设备示意图如图9所示。采用VeriPose星站差分接收机提供高精度速度基准;航向信息由国产某型惯性导航设备提供,航向角误差为0.1°(1σ)。

图9 DVL标定设备示意图Fig.9 Schematic diagram of DVL calibration equipment
选取开阔水域,实验船匀速直线航行,航向过程中要求匀速直测速线航程不小于2 n mile[14]、航向控制误差在1°以内,试验标定航迹示意图如图10所示,具体过程如下:

图10 标定航迹示意图Fig.10 Schematic diagram of calibration track
1)实验船以经济航速航行至A点就位,保持主机转速恒定,至 A1点时正式开始标定试验,其中AA1点为航速稳定区间,要求不少于200 m。
2)保持主机转速和航迹向稳定,继续沿直线航行至B点,标定结束,其中A1B点为航速标定区间;若需要获取多个标定样本,可继续航行至B1点后转向,并重复上述过程。
3)读取数据进行数据处理,按下式计算标定系数与安装偏角。

式中:VGPS为GPS平均合速度;VDVL为DVL平均合速度;VDX为 DVL测得的纵向速度(沿船艏方向);VDY为DVL测得的横向速度(沿船右舷方向);VGX为GPS测得的沿北方向速度;VGY为 GPS测得的沿东方向速度;α为船的航向角。
3.2 标定结果
选取西陵峡水域的10个非有效标定样本进行分析,结果如表1所示。可以看出:在数据样本不理想的情况下,通过修正Kalman滤波预处理后的校定结果明显优于标准Kalman滤波预处理,比例因子由 0.210 2%减小到 0.055 2%、安装偏角由1.440 1°减小到0.271 5°,一致性较好,更能够反映真实安装偏角和比例因子变化情况,有效降低了平台对实验环境的要求,提高了校准效率。
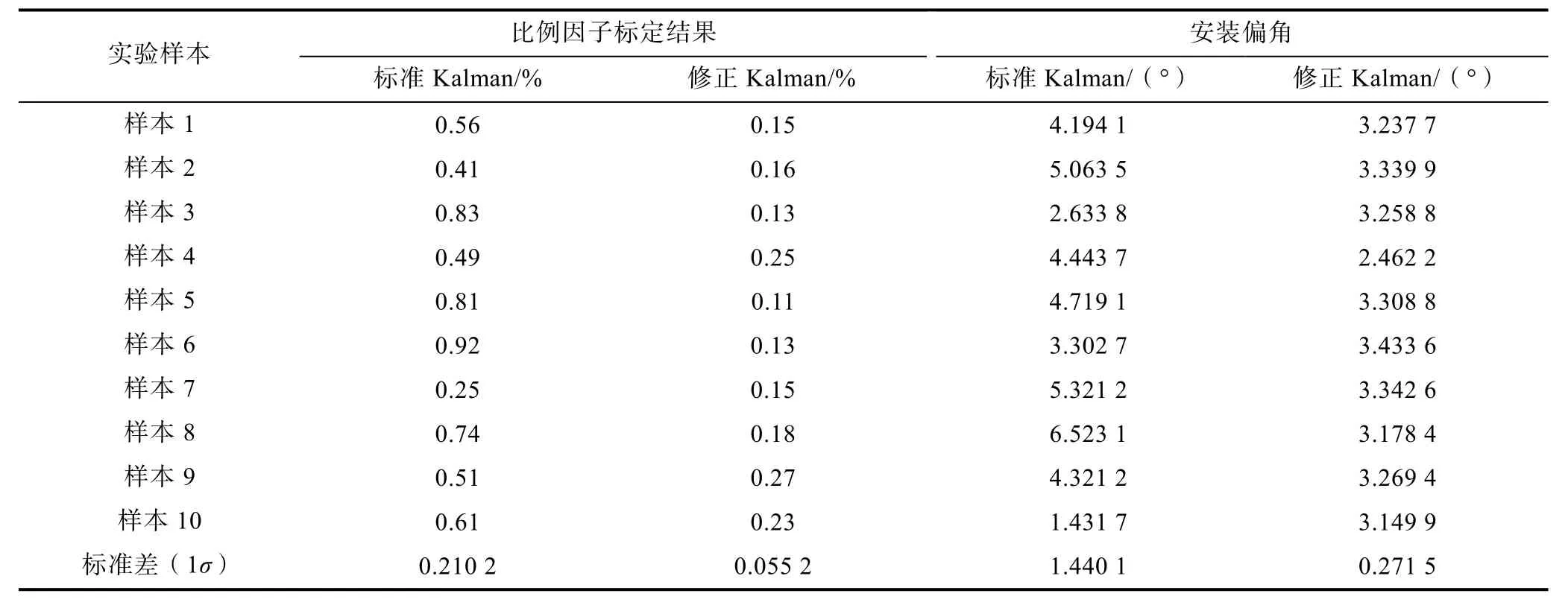
表1 两种预处理方法标定结果对比Table 1 Comparison of calibration results of tow preprocessing methods
4 结束语
本文针对恶劣作业条件下的声学多普勒计程仪标定问题进行了分析讨论,提出了一种基于修正Kalman滤波预处理的误差校准方法,通过分析真实数据统计分布、并与标准Kalman滤波预处理方法的校准性能进行了比对,得到如下结论:
1)在复杂恶劣应用环境下,声学多普勒计程仪测速数据更符合Levy统计分布规律,传统基于高斯噪声假设的数据预处理方法不再适用。
2)通过修正 Kalman滤波预处理后的标定结果更加稳健,降低了平台对实验环境的要求,提高了校准效率。
