惯性平台系统石英加速度计温度建模补偿技术
2021-09-04张金云赵军虎
张金云, 姜 欢, 赵军虎, 刘 凯, 王 汀
(1.超精密航天控制仪器技术实验室,北京 100039;2.北京航天控制仪器研究所,北京 100039)
0 引言
惯性平台是测量载体姿态信息和视加速度的一种稳定平台系统,由陀螺、加速度计、平台台体、框架系统和稳定回路组成。安装在惯性平台系统台体上的陀螺敏感台体相对惯性空间的角速度,并通过稳定回路进行控制,使平台台体在惯性空间中保持稳定[1]。惯性平台系统常温启动后,进入导航工作状态之前需要进行自对准,以建立初始的水平和方位基准[2]。对准精度和对准速度是自对准的两项重要技术指标,自对准的精度对惯导系统的导航精度有着重要影响,自对准的速度在很大程度上决定了武器系统的快速反应能力,因此要求对准精度高、对准时间短,既精又快[3-8]。惯性平台系统要实现快速高精度自对准,陀螺精度和加速度计精度是最主要的影响因素,但二者都受温度影响,特别是惯性平台系统上电初期,温度场变化显著,如何实现变化温度场环境中的快速高精度自对准是一个技术难题。
提升复杂温度环境下惯性导航系统的使用精度一直是惯导领域研究的热点问题,温度是影响惯性导航系统最为典型的环境因素,而石英加速度计受温度影响最为显著。近些年,业内对石英加速度计的温度误差补偿技术越发重视,通过辨识加速度计的温度模型参数,对加速度计进行实时温度补偿的软件方案成为提高精度的一个重要可行方法[9-11]。哈尔滨工业大学的王淑娟等[12]在深入了解石英挠性加速度计误差参数与温度的变化规律后,在20℃~50℃的温度区间内结合最小二乘法建立加速度计误差参数的多项式模型,并利用导航计算机实现对加速度计温度误差的干扰补偿,大大提高了模型的辨识度。翁海娜等[13]针对加速度计温度补偿提出了一种新方法,通过分析仪表定点升温实验的输出以及多阶拟合确定加速度计在30℃~70℃温度区间内的温度误差模型。经大量实验数据发现,在不同环境温度下,基于此模型补偿后的光学捷联系统成功提高了精度,在探索光学捷联系统实际工作时加速度计与温度的相关性上取得了很大的进展。西北工业大学的李汉舟等[14]针对惯性器件温度特性的不同提出了一种温控结合温补的新思路:基于温控系统,得到温度特性的传递函数。为防止加速度计热传递给陀螺,影响陀螺的稳定性,特用两种特殊材料制成新型隔热垫。大量试验数据表明:在-40℃~+60℃温度范围内,惯导预热只需15min,大大减少了过去单独温控的预热时间,且SINS的温度补偿只用单轴温控惯性平台就能完成。基于上述方案的SINS初始对准精度高,可达到理论上的极限,也减轻了后期设备维护的成本。陶彧敏等[15]基于激光捷联惯组提出了一种简单快速的系统温度补偿方法,通过惯组标定得到惯性器件标定诸元与温度,首次实现了样条插值迭代修正的建模方法并对脉冲进行实时补偿,提高了惯组的测量精度和标定的稳定性。该方法不仅可以提高惯导的精度,也可以大大缩短惯组冷态下的启动时间。一直以来,业内对石英加速度计的温度建模补偿工作集中在单表级研究和捷联惯导系统级研究,而对惯性平台系统中石英加速度计的温度建模补偿及快速自对准研究还是空白。
本文研究了惯性平台系统在内部温度场变化条件下的石英加速度计温度建模补偿技术,通过多项式样条函数回归方法辨识出了石英加速度计的温度模型参数,并对惯性平台系统快速启动升温过程中石英加速度计输出补偿后的自对准精度进行了验证。
1 石英加速度计温度特性分析
目前,惯性平台系统工作时,通过温控系统保证相对稳定的内部温度场环境,而建立稳定的温度场往往需要较长时间。为提升惯性平台系统快速使用性能,需要惯性平台在上电后内部温度场尚不稳定时开始正常工作,而石英加速度计由于其材料及结构原因,在温度发生明显变化时,其零偏及标度因数均会发生温度漂移。
惯性平台系统上电后,连续进行石英加速度计正倒置标定(X、Y、Z三个方向分别标定),得到三个石英加速度计的温度T、石英加速度计零偏K0和石英加速度计标度因数K1随惯性平台系统通电时间的增长而变化的特性曲线,如图1所示。
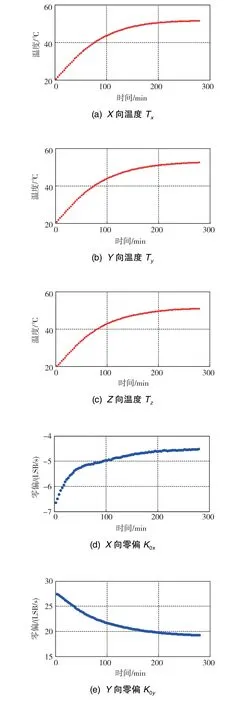

图1 石英加速度计温度T、零偏K0及标度因数K1随时间的变化曲线Fig.1 Curves of temperature, zero bias and scale factor of quartz accelerometer with time
图1中,三个石英加速度计温度Tx、Ty和Tz随着惯性平台系统通电时间的增加而逐渐升高,三个石英加速度计零偏K0x、K0y、K0z和标度因数K1x、K1y、K1z也随着通电时间的增加而不断漂移变化。随着石英加速度计温度的单调增加,其零偏和标度因数变化并不单调,但整体连续性较好,符合分段线性的基本特征,具有良好的可补偿特性。
2 石英加速度计温度建模补偿技术
石英加速度计处于变化的温度环境中,其输出会有显著的温度漂移特性,温度建模补偿就是解决变化温度条件下惯性仪表输出精度及真值差异性的问题,满足惯性平台系统在通电最短时间内进行自对准、保证高精度的使用要求。
2.1 温度建模方法
惯性平台系统石英加速度计温度建模补偿技术的关键就在于温度模型参数的辨识,模型辨识参数值与真实值的接近程度决定着温度模型的精度,也决定着温度补偿的效果。
(1)石英加速度计温度标定
惯性平台系统上电后,其内部环境温度会慢速升高,在这个过程中分别进行X、Y和Z三个方向石英加速度计的温度建模。通过惯性平台环架转动使X向石英加速度计正置(指天)并保持5min,随后让惯性平台环架转动180°使X向石英加速度计倒置(指地)并保持5min,如此不断重复试验直至石英加速度计温度超过50℃,以覆盖惯性平台正常工作的温度范围。第一个方向完成后待平台内部环境温度恢复至室温,再进行另外两个方向的石英加速度计温度标定,试验过程同第一个方向。
(2)石英加速度计零偏与标度因数计算
通过对惯性平台系统采集的石英加速度计正负倒置输出进行计算,求解三个石英加速度计的零偏K0和标度因数K1。一个正置位置和一个倒置位置组合求解出一组K0和K1,该组的温度取该段时间的平均值。
三个石英加速度计零偏K0和标度因数K1的计算方法如下

式(1)中,Ai+和Ai-分别为石英加速度计正置秒增量输出和石英加速度计倒置秒增量输出,i分别表示x、y、z三个方向。
每个石英加速度计K0和K1随温度变化的数据序列得到后,对三个石英加速度计的零偏和标度因数依次进行温度建模。
(3)石英加速度计温度模型参数辨识
由于石英加速度计输出特性与温度变化显著相关,因此对于石英加速度计温度建模采用样条函数回归方法。样条函数回归使用特定分段函数(或样条函数)对数据进行拟合,但相邻两段函数之间是连续的,即满足整体连续的条件[16]。样条函数可以用来对任意连续函数进行非常好地近似,并保证在分段衔接处连续可导,曲线光滑。
根据石英加速度计温度特性,采用多项式样条函数回归。在多项式样条函数阶数的选择上,既要能很好地模拟出真实曲线,又要尽可能地减少运算量,因此采用三阶样条函数。
设在节点xi处S(x)的二阶导数为

由于在子区间[xi-1,xi]上S(x)=Si(x)是不高于三次的多项式,其二阶导数S″(x)必是线性函数(或常数)。因此,有

记hi=xi-xi-1, 则有

对式(4)连续积分两次可得
式(5)中,Ai和Bi为积分常数。利用插值条件Si(xi-1)=yi-1和Si(xi)=yi, 得到
将式(6)和式(7)代入式(5)中,即得
根据上述表达式,将自变量x代换为温度T,最终可得三个石英加速度计的温度模型

对惯性平台系统X、Y、Z三个方向的石英加速度计零偏K0和标度因数K1随温度变化特性进行三次多项式样条函数回归建模,模型曲线如图2所示。
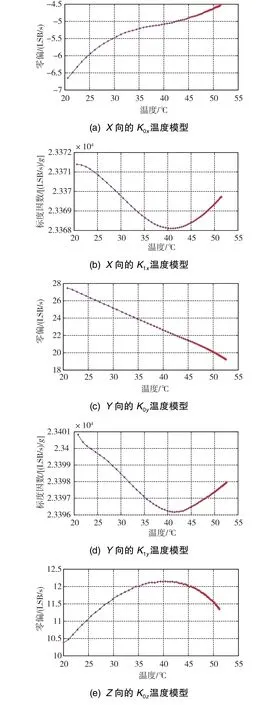
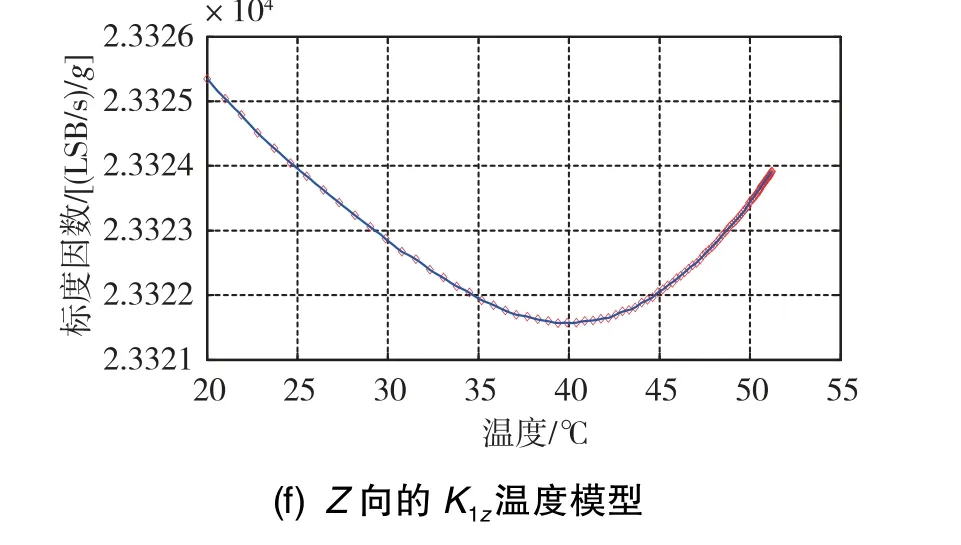
图2 石英加速度计的K0与K1温度模型曲线Fig.2 Temperature modelcurves of quartz accelerometer
图2中,红色散点为不同温度点时标定出的石英加速度计K0和K1原始值,蓝色曲线为通过三次多项式样条函数对K0和K1进行回归辨识得到的温度模型,通过该方法得到的石英加速度计温度模型能够覆盖惯性平台系统正常使用的温度范围。同时,石英加速度计的K0和K1拟合度高,模型稳定准确。
2.2 温度补偿及验证
将石英加速度计温度模型辨识参数代入到惯性平台系统石英加速度计输出中进行补偿,补偿后的石英加速度计输出公式如下

式(10)中,Ai为石英加速度计的脉冲输出,K0ib为石英加速度计的零偏标准值,K1ib为石英加速度计的标度因数标准值,K0i(T)为石英加速度计零偏模型,K1i(T)为石英加速度计的标度因数模型。
将辨识出的石英加速度计温度模型参数回代到惯性平台系统温度建模数据中验证,对比每个石英加速度计K0和K1的温度补偿效果,如图3所示。
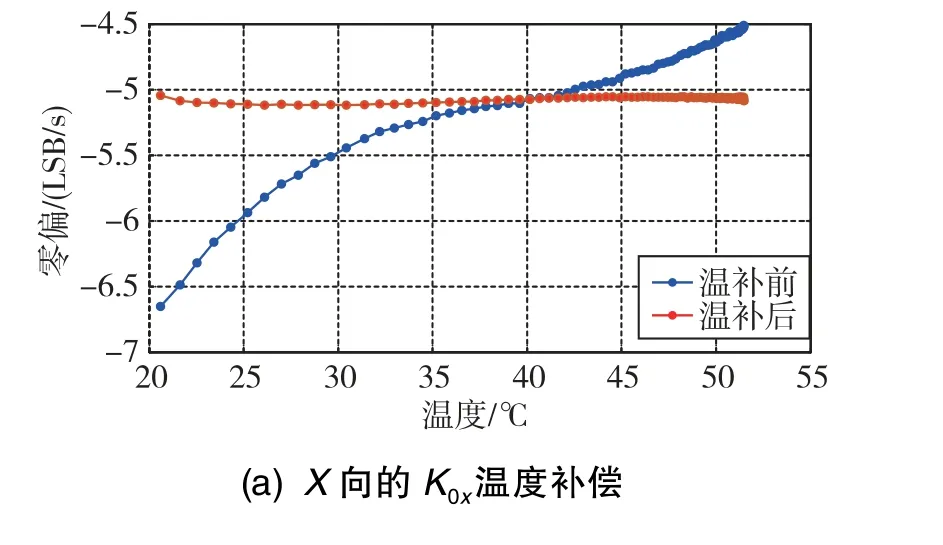
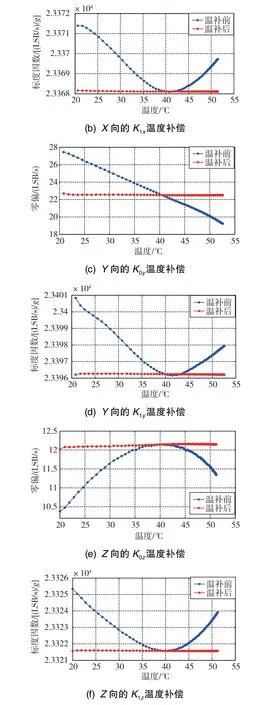
图3 石英加速度计的K0与K1温度补偿曲线Fig.3 Temperature compensation curves of quartz accelerometer
图3中,蓝色曲线为温度补偿前的石英加速度计的K0或K1,红色曲线为温度补偿后的石英加速度计的K0或K1。可以明显看到,温度补偿后,三个石英加速度计的K0和K1完全没有了随温度变化的明显趋势,基本可以保持一条直线,补偿效果十分显著。
对惯性平台系统进行多组温度补偿验证,对比三个石英加速度计温度补偿前后K0和K1的精度,如表1所示。
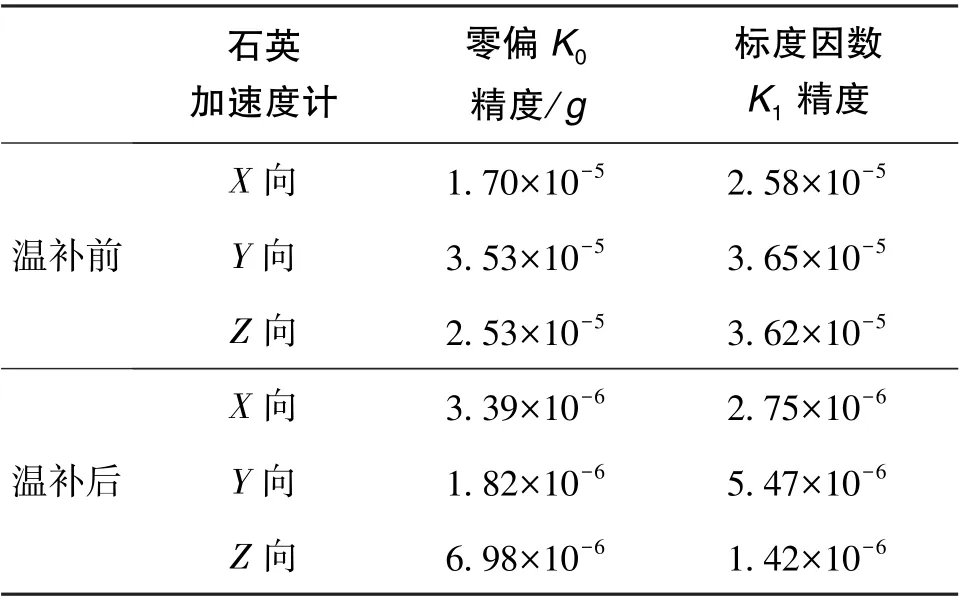
表1 石英加速度计温度补偿前后K0和K1精度对比Table 1 Precision comparison of quartz accelerometer before and after temperature compensation
温度补偿后,三个石英加速度计的输出精度比补偿前普遍高出一个数量级。通过对石英加速度计的温度补偿,基本消除了惯性平台系统内部温度场变化时石英加速度计的温度漂移特性,显著提升了惯性仪表的输出精度水平。
3 惯性平台系统自对准验证
根据石英加速度计温度模型完成石英加速度计原始输出的补偿,之后进行惯性平台系统的自对准验证。自对准过程分为自主粗对准和自主精对准:粗对准根据双矢量定姿原理进行,能够适应微幅晃动基座条件下的自对准需求;精对准通过Kalman滤波估计手段实现惯性平台系统的最优估计初始对准。
为了验证惯性平台系统快速启动性能,惯性平台系统上电后,石英加速度计温度逐渐上升,升温过程中同步连续进行六组自对准,完成后惯性平台系统断电。六组自对准过程中,石英加速度计的实测温度如表2所示。
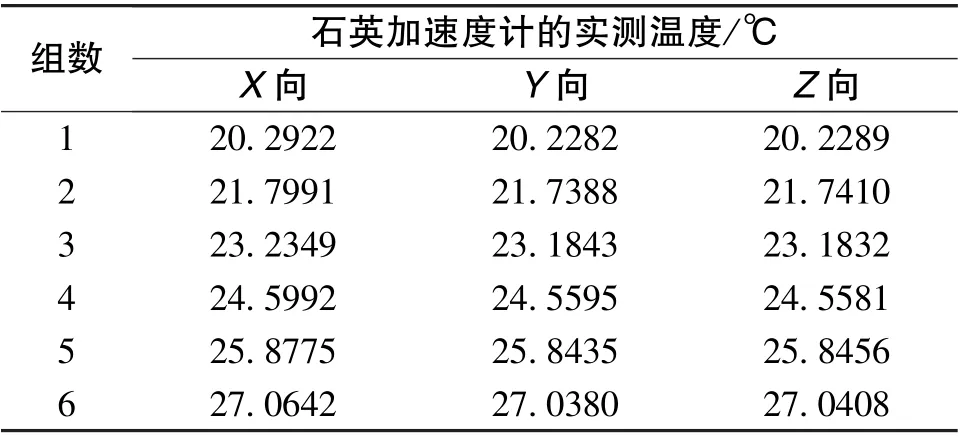
表2 惯性平台系统自对准时石英加速度计温度Table 2 Temperature of quartz accelerometer at the time of inertialplatform system self-alignment
由于石英加速度计输出对惯性平台系统自对准的水平角影响最为显著,对比石英加速度计温度变化时自对准的两个水平角在温度补偿前后的变化趋势,如图4所示。
石英加速度计温度补偿前,惯性平台系统自对准的俯仰角与横滚角随温度变化显著,而温度补偿后基本消除了水平角的单漂趋势,表明温度补偿效果显著,惯性平台系统自对准精度得到了有效提高。
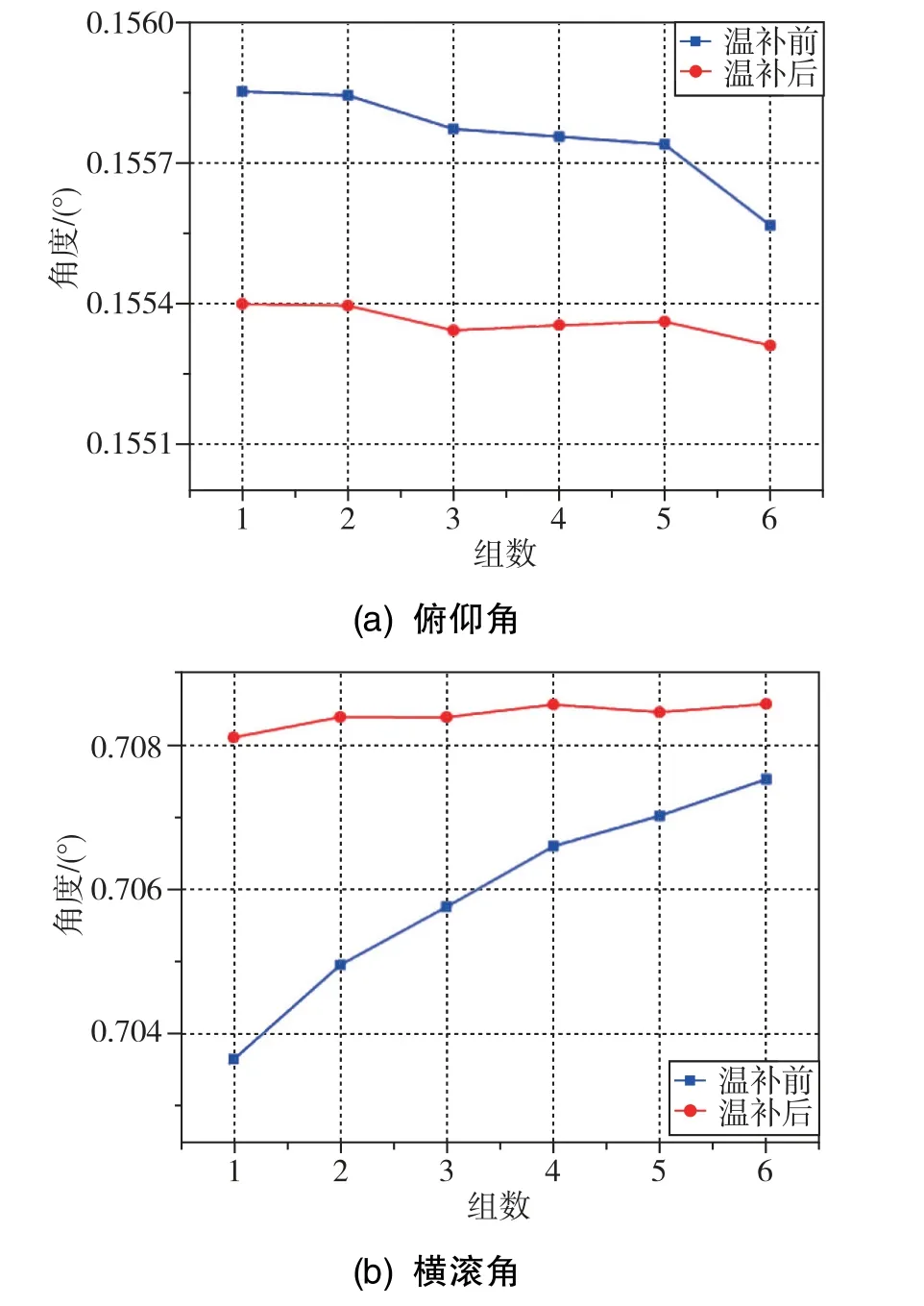
图4 石英加速度计温度补偿前后自对准水平角变化曲线Fig.4 Change curves of quartz accelerometer self-alignment horizontalangles before and after temperature compensation
4 结论
本文研究了惯性平台系统石英加速度计温度建模补偿技术,在系统内部温度发生变化时,通过三次多项式样条函数回归方法辨识出石英加速度计的温度参数模型,之后完成了对惯性平台系统快速启动过程中石英加速度计的温度补偿,最后进行了惯性平台系统的自对准精度验证。通过对惯性平台系统石英加速度计温度建模补偿技术的研究,得到如下结论:
1)惯性平台系统石英加速度计温度漂移特性显著,采用多项式样条函数回归方法对惯性平台系统石英加速度计进行温度建模,可以满足惯性平台系统全工作温度范围的使用要求;
2)对惯性平台系统石英加速度计的温度补偿,可以保证石英加速度计在最短时间内达到仪表最高精度,解决了变温场环境下仪表输出真值差异的问题;
3)温度补偿后,惯性平台系统无需等待温度场稳定即可进行自对准,极大缩短了惯性平台系统冷态启动时间,可以满足武器系统在通电最短时间内完成发射准备、保证高精度的使用要求,显著提升了惯性平台系统的实战化性能。
