冬小麦SPAD值无人机可见光和多光谱植被指数结合估算
2021-08-27牛庆林冯海宽周新国朱建强雍蓓蓓李会贞
牛庆林 冯海宽 周新国 朱建强 雍蓓蓓 李会贞
(1.中国农业科学院农田灌溉研究所, 新乡 453002; 2.国家农业信息化工程技术研究中心, 北京 100097;3.长江大学农学院, 荆州 434025)
0 引言
叶绿素含量是表征作物健康状态的重要指标,在不同生育期对作物施肥与田间管理具有指导意义[1]。随着环境和生育期的变化,作物叶绿素含量也会发生相应变化,因此及时准确估算作物叶绿素含量具有重要意义[2]。传统的叶绿素含量估测方法不仅具有破坏性,而且费时、耗力。叶绿素含量与SPAD(Soil and plant analyzer development)值具有较好的相关性[3-5],作物叶片SPAD值是反映叶片叶绿素含量的有效指标,测量叶片SPAD值是叶片叶绿素含量无损测量的有效途径,具有快速、便捷的优点。
随着传感器、物联网、互联网+、大数据和人工智能等技术的发展,农业遥感技术在农业领域的应用深度和广度都在不断扩展[6]。无人机遥感在国内外农业领域发展快速[7-8]。与无人机搭载的雷达传感器或高光谱相机相比,可见光和多光谱相机成本低、重量轻,极大地减轻了无人机遥感平台的载荷,续航时间明显延长,因此可以快速获取大范围的作物空间影像数据,而且后续影像数据处理的难度低,更容易推广应用,已成为大范围作物长势监测应用的研究热点[9]。
基于无人机多光谱影像提取不同光谱通道的影像灰度,计算多光谱植被指数,进行叶面积指数(Leaf area index,LAI)和SPAD值的估算,具有较好的估算结果[10-11]。基于无人机可见光影像提取红、绿和蓝影像通道的灰度,计算可见光植被指数,也具有较好的估算结果[12-15]。随着计算机计算能力的增强及无人机遥感技术在作物长势监测应用研究的深入,将不同类型的数据相结合或融合、构建作物长势参数的估测模型,能够进一步提高作物长势参数估测模型的精度和稳定性,因此成为目前的研究热点[13,15-18]。
然而,基于无人机可见光和多光谱影像计算可见光和多光谱植被指数,将可见光植被指数与多光谱植被指数相结合估测冬小麦SPAD值的研究还很少。因此,本文探究SPAD值与可见光和多光谱植被指数的关系,将可见光植被指数与多光谱植被指数相结合估算冬小麦SPAD值,并基于可见光植被指数、多光谱植被指数和可见光与多光谱相结合植被指数,分别采用逐步回归和随机森林回归方法估算SPAD值,对比分析不同类型植被指数估算SPAD值的精度,以期为冬小麦SPAD值的估算提供参考。
1 材料与方法
1.1 试验区概况
试验区位于湖北省荆州市荆州区长江大学科研基地(32°21′22″N,112°8′14.5″E,海拔约32 m),属于热带季风气候区,年平均气温15.9~16.6℃,多数年份降水量在1 100~1 300 mm之间,有足够的气候资源供农作物生长。冬小麦种植在2 m×2 m的混凝土有底测坑中,共48个测坑,种植郑麦9023和鄂麦580两个品种,如图1所示,于2018年10月31日播种,播种量为135 kg/hm2,进行条播,行距为25 cm,氮、磷、钾肥用量分别为180、75、90 kg/hm2,磷钾肥做基肥,其中氮肥分为基肥和腊肥,比例为7∶3,其他田间管理措施按照当地的标准统一管理。
1.2 冬小麦SPAD值田间数据获取
SPAD-502Plus型叶绿素仪是一个重量轻、紧凑的测量作物叶片叶绿素相对含量的无损监测仪器,SPAD值能够指示作物叶片中叶绿素含量的相对值,SPAD值越大,表明叶片叶绿素含量越高,指示作物生长越健康。每个测坑选择具有代表性的5个植株,分别选定每个植株的旗叶进行SPAD值的测量,测量位置为叶片的中间,取5个旗叶SPAD值的平均值作为该小区冬小麦叶片的SPAD值[19],一个测坑得到一个样本数据。分别在2019年4月16日、4月24日和5月9日进行冬小麦叶片SPAD值的测量,其中4月16日和4月24日,40个测坑分别取得40个样本数据,5月9日,由于冬小麦叶片受到不同程度白粉病和条锈病等的影响,得到27个有效样本数据,3次取样共得到107个样本数据。借助于R软件将获取的冬小麦SPAD值随机分为两部分,70%的样本数据(75个)用于构建SPAD值的估算模型,30%的样本数据(32个)用于对估算模型进行验证与评价,其统计结果如表1所示。

表1 冬小麦SPAD值的统计结果
1.3 无人机影像获取与预处理
在天空晴朗无云的条件下,与获取田间冬小麦SPAD值同步,利用Phantom4 Pro V2.0型无人机搭载微小型可见光相机和多光谱相机进行冬小麦可见光和多光谱影像的获取,如图2所示。可见光相机包含红、绿和蓝光谱通道,具有1英寸2 000万像素CMOS(Complementary metal-oxide-semiconductor)传感器,感光度高达12 800,具有较高的空间分辨率。多光谱相机为S3小型机载多光谱仪,具有红(660 nm)、绿(550 nm)和近红外(850 nm)光谱通道,尺寸为59 mm×41.5 mm×36 mm,裸机质量为50 g,带电池质量为76 g,配备GPS(Global positioning system)接收器,自动对每个图像进行地理标记,具有1 200万像素和敏锐的非鱼眼镜头,可获得高质量的多光谱影像。
无人机飞行前进行研究区的航线规划,设置航高20 m,航向重叠度85%,旁向重叠度80%,飞行速度2 m/s,可见光相机选择自动拍照模式,多光谱相机设置快门速度1/1 000 s,感光度50,拍照间隔2 s等参数,进入航线前需拍摄多光谱定标版影像,用于多光谱影像信息值的定标。利用S3小型机载多光谱仪对应的光谱定标软件,首先对获取的RAW和JPG格式的原始数据进行预处理,分别得到TIF格式的定标板和冬小麦多光谱单幅影像,基于TIF格式的定标板多光谱影像生成定标系数,利用定标系数依次对TIF格式的冬小麦多光谱单幅影像进行定标,得到TIF格式定标后的冬小麦多光谱单幅影像[8]。借助Agisoft PhotoScan Professional软件进行无人机可见光和定标的多光谱影像的拼接处理,生成对应的高清数字正射影像(Digital orthophoto map,DOM)[13],可见光影像空间分辨率为0.006 m,多光谱影像空间分辨率为0.009 m。
为了降低边缘效应对提取冬小麦可见光红、绿和蓝影像通道灰度和多光谱红、绿和近红外影像通道灰度的影响,对拼接的可见光和多光谱DOM进行中值滤波的图像算法处理,中值滤波模板尺寸分别设置为0×0、3×3、5×5、7×7和9×9。选择土壤、混凝土和冬小麦为研究对象,其中混凝土的像元纯净度最高、土壤次之,冬小麦较低,分别提取中值滤波处理后的可见光和多光谱DOM中的土壤、混凝土和冬小麦的影像灰度,与不使用中值滤波处理提取的土壤、混凝土和冬小麦的影像灰度均值和标准差进行对比,分别以可见光和多光谱DOM的红通道影像为例,提取土壤、混凝土和冬小麦的影像灰度均值和标准差,如表2、3所示。

表2 可见光影像的红通道灰度的均值与标准差
不同尺寸中值滤波模板对提取可见光红通道土壤、混凝土和冬小麦影像灰度均值影响较小,但对提取区域内的影像灰度标准差影响差异较大,随着滤波模板的增大,冬小麦和土壤影像灰度标准差逐渐降低,混凝土影像灰度标准差基本不变,这是由于混凝土的像元纯净度较高,而土壤和冬小麦的像元纯净度相对低些。当滤波模板尺寸为7×7时,土壤和冬小麦的影像灰度标准差随着滤波模板的增大,降低变缓,因此,本文选择7×7的中值滤波模板对可见光影像进行预处理,再提取冬小麦的冠层影像灰度。

表3 多光谱影像的红通道灰度的均值与标准差
使用中值滤波处理与不使用相比,多光谱红通道混凝土的影像灰度均值有略微降低的趋势,而土壤和冬小麦的影像灰度均值有略微升高的趋势,总体上,中值滤波模板尺寸对多光谱红通道混凝土、土壤和冬小麦的影像灰度均值影响较小。使用中值滤波处理与不使用相比,多光谱红通道混凝土影像灰度标准差有略微降低的趋势,而土壤和冬小麦影像灰度标准差降低明显。中值滤波模板尺寸增大时,多光谱红通道混凝土和冬小麦影像灰度标准差有略微降低的趋势,但土壤影像灰度标准差降低明显,这可能是由土壤含水率较高引起的。综合考虑冬小麦冠层影像灰度是土壤和冬小麦植株的混合信息,为了降低土壤的影响,本文选择7×7的中值滤波模板对多光谱影像进行预处理,再提取冬小麦的冠层影像灰度。
基于中值滤波处理后的可见光和多光谱影像DOM,利用ENVI 5.3软件提取每个实测小区的冠层影像平均灰度,其中可见光DOM具有红(Red,R)、绿(Green,G)和蓝(Blue,B)通道灰度,多光谱DOM具有红 (Multispectralred,MR)、绿(Multispectral green,MG)和近红外(Multispectral near infra-red,MNIR)通道灰度。对提取的冬小麦可见光和多光谱DOM的单通道影像灰度进行归一化处理,降低天空光对影像灰度的影响[12],可见光影像R、G和B通道影像灰度进行归一化处理后的影像灰度表示为r、g、b,通道R、G、B、MR、MG、MNIR灰度表示为R、G、B、MR、MG、MNIR,多光谱影像MR、MG和MNIR通道影像灰度进行归一化处理后的影像灰度表示为m1、m2、m3。
1.4 可见光与多光谱植被指数选取
基于已有的研究成果以及叶绿素含量与可见光和多光谱植被指数的敏感性,选用如表4、5所示的可见光和多光谱植被指数,探究其与冬小麦叶片SPAD值的关系。

表4 与SPAD值相关的可见光植被指数
1.5 数据分析方法
在本研究中,用线性与非线性回归分析探究植被指数与SPAD值的关系,其中植被指数包括可见光和多光谱植被指数,非线性回归包括指数回归、对数回归和幂回归。另外,将可见光植被指数与多光谱植被指数以相乘的方式进行结合,即可见光与多光谱相结合植被指数估算SPAD值。最后,利用逐步回归和随机森林回归分析方法分别进行可见光、多光谱和可见光与多光谱相结合植被指数估算SPAD值。其中,逐步回归分析模型构建时,为了将对模型贡献很小的变量删除,选择模型变量的显著性程度、赤池信息量准则(Akaike information criterion,AIC)、模型简单性等相结合的判别准则。其中,AIC准则考虑了模型的统计拟合度以及用来拟合的变量数目,优先选择AIC值较小的模型,表明模型用较少的变量获得了足够的拟合度。

表5 与SPAD值相关的多光谱植被指数
1.6 统计分析
不同类型植被指数与SPAD值的决定系数R2、均方根误差(Root mean square error,RMSE)和归一化的均方根误差(Normal RMSE,nRMSE)作为评价估算模型与验证模型的指标。估算模型的R2越大,RMSE和nRMSE越小,表明模型的估算能力越好,验证模型的R2越大,RMSE和nRMSE越小,表明估算模型稳定性越好。
2 结果与分析
2.1 可见光植被指数
将可见光植被指数与冬小麦SPAD值进行线性与非线性回归探究分析,其中可见光植被指数作为自变量,SPAD值作为因变量,筛选R2最大值的模型作为该可见光植被指数的最优回归模型,并计算相应的回归方程,结果如表6所示。为了筛选与SPAD值相关性较好的可见光植被指数,以可见光植被指数与SPAD值的R2为判别准则,将可见光植被指数与SPAD值的敏感性进行排序。其中,RBRI和IKAW与SPAD值的R2分别达到0.87和0.86,具有较好的相关关系,达到0.01显著性水平;r、b、MGRVI和ExR与SPAD值的R2分别为0.68、0.58、0.48和0.41,高于0.40,达到0.01显著性水平;剩余的可见光植被指数与SPAD值的R2在0.40以下,然而g、RGBVI、PPR、GLA、ExG、CIVE、VARI、WI、RGRI、GBRI与SPAD值之间的相关关系不显著。

表6 可见光植被指数与SPAD值的回归分析
为了验证SPAD值可见光植被指数估算模型的精度和稳定性,将估算模型预测的SPAD值与实测SPAD值的RMSE和nRMSE作为评价指标,结果如表6所示。结果表明,RMSE在2.77~6.76之间,nRMSE在6.75%~16.48%之间,其中RBRI和IKAW验证模型的RMSE和nRMSE分别为2.77、6.75%和2.80、6.81%。
2.2 多光谱植被指数
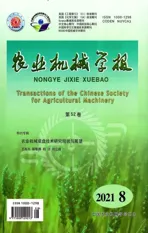
将m2、m1和m3与所选的23个多光谱植被指数进行SPAD值的估算,其线性或非线性相关关系如表7所示,所有模型R2大于或等于0.46,都达到0.01显著性水平。其中,与SPAD值相关性最高的多光谱植被指数为GNDVI,R2达到0.90;与SPAD值相关性最差的为m1,R2为0.46。GDVI、GRVI、CI、GNDVI、GRDVI、GNLI、GMSR、GMNLI、GSAVI、GOSAVI与SPAD值的R2在0.80以上、0.90以下,表明这些含有近红外和绿影像通道灰度组合的多光谱植被指数与含有近红外和红影像通道灰度组合的多光谱植被指数相比,与SPAD值的相关性更高,GNDVI具有最高的相关性。
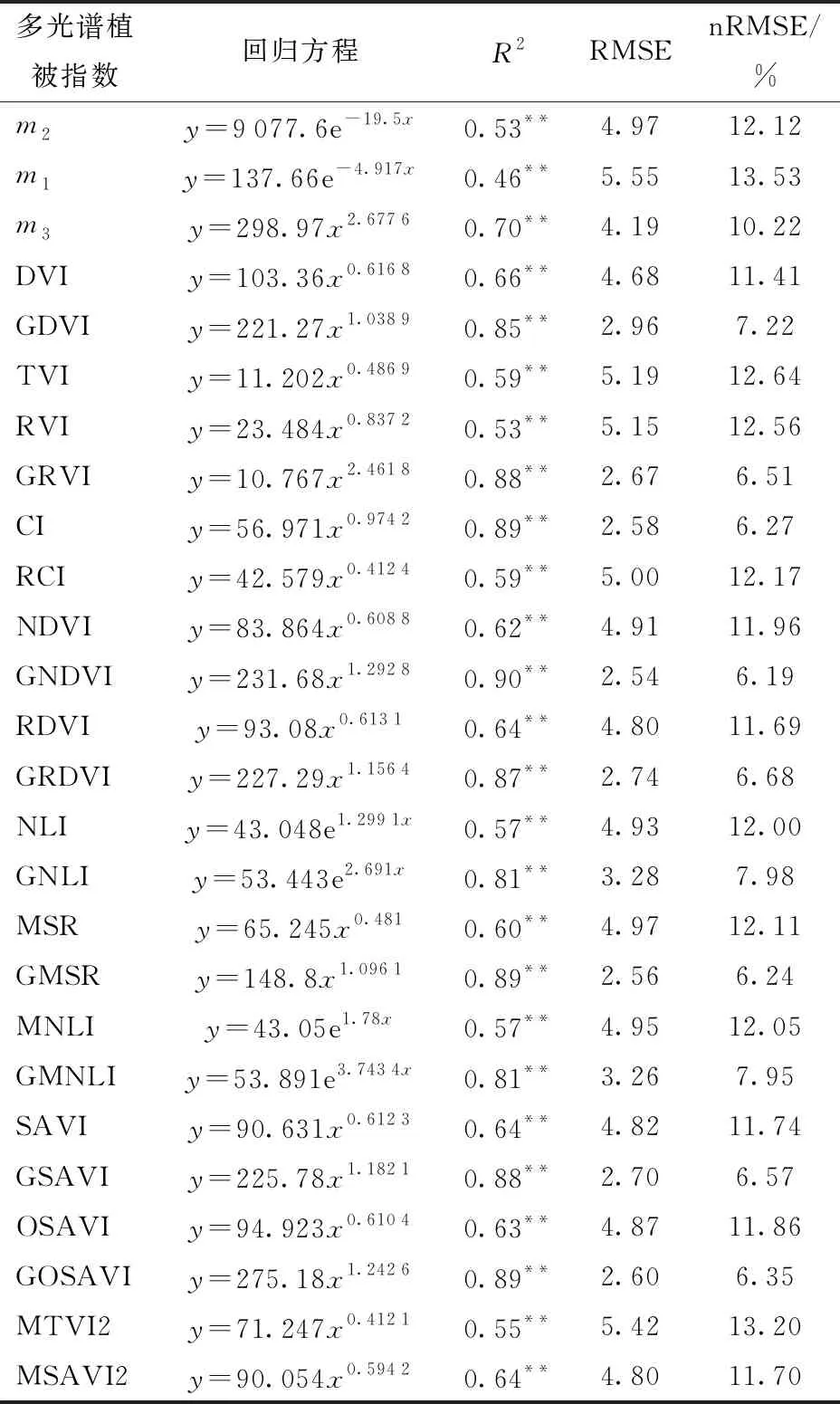
表7 多光谱植被指数与SPAD值的回归分析
为了验证SPAD值多光谱植被指数估算模型的精度和稳定性,将估算模型预测的SPAD值与实测SPAD值的RMSE和nRMSE作为评价指标,结果如表7所示。结果表明,RMSE在2.54~5.55之间,nRMSE在6.19%~13.53%之间,其中GNDVI验证模型的RMSE和nRMSE分别为2.54和6.19%。
2.3 可见光植被指数与多光谱植被指数相结合指数
以GNDVI与每一个可见光植被指数或单通道影像灰度相乘的方法,构建可见光植被指数与多光谱植被指数相结合指数[17],并分析与SPAD值的线性与非线性关系,计算相应的回归方程,结果如表8所示。其中,CIVE×GNDVI、b×GNDVI、IKAW×GNDVI和g×GNDVI与SPAD值的R2分别为0.89、0.85、0.77和0.70,表明其具有较好的相关关系。结果表明,CIVE×GNDVI估算SPAD值的幂函数模型具有最高的估算精度。与仅用可见光植被指数估算SPAD值相比,结合指数进一步提高了估算模型的精度。
为了验证SPAD值可见光植被指数与多光谱植被指数相结合指数估算模型的精度和稳定性,将估算模型预测的SPAD值与实测SPAD值的RMSE和nRMSE作为评价指标,结果如表8所示。结果表明,RMSE在2.50~6.91之间,nRMSE在6.10%~16.84%之间,其中CIVE×GNDVI与SPAD值模型验证的RMSE和nRMSE分别为2.55和6.21%,表明模型具有较高的精度和稳定性。

表8 可见光与多光谱相结合植被指数与SPAD值的回归分析
2.4 基于逐步回归分析方法估测SPAD值
2.4.1可见光植被指数
将可见光植被指数、b、g、r以及SPAD值作为逐步回归模型的输入变量,构建SPAD值的逐步回归估算模型,并计算模型输入变量的显著性水平、模型的AIC值和R2,结果如表9所示。其中,估算模型AIC值在353.87~492.10之间,R2在0.32~0.91之间。
为了验证SPAD值可见光植被指数的逐步回归估算模型的精度和稳定性,将估算模型预测的SPAD值与实测SPAD值的RMSE和nRMSE作为评价指标,结果如表9所示。结果表明,RMSE在2.66~4.95之间,nRMSE在6.47%~12.07%之间。

表9 可见光植被指数估算SPAD值的逐步回归分析模型
为了筛选较优的可见光植被指数的逐步回归分析模型,综合考虑估算模型输入变量的显著性水平、AIC值和R2及模型验证的RMSE和nRMSE,得到综合精度较好的两个逐步回归分析模型,分别包含5个输入变量(g、MGRVI、GRVI、VARI和IKAW)和4个输入变量(g、GRVI、VARI和IKAW),估算模型的AIC值、R2分别为355.12、0.90和369.36、0.88;模型验证的RMSE和nRMSE分别为2.66、6.47%和2.67、6.50%。利用实测SPAD值与模型估算的SPAD值进行对比分析,结果如图3所示,5个输入变量和4个输入变量的模型预测值与实测值的R2分别为0.86和0.85,表明模型预测值与实测值具有较好的一致性。
2.4.2多光谱植被指数
将多光谱植被指数、m2、m1、m3以及SPAD值作为逐步回归模型的输入变量,构建SPAD值的逐步回归估算模型,并计算模型输入变量的显著性水平、模型的AIC值和R2,结果如表10所示。其中,估算模型AIC值在351.92~465.67之间,R2在0.52~0.91之间。
为了验证SPAD值多光谱植被指数的逐步回归估算模型的精度和稳定性,将估算模型预测的SPAD值与实测SPAD值的RMSE和nRMSE作为评价指标,结果如表10所示。结果表明,RMSE在2.48~10.98之间,nRMSE在6.04%~26.76%之间。
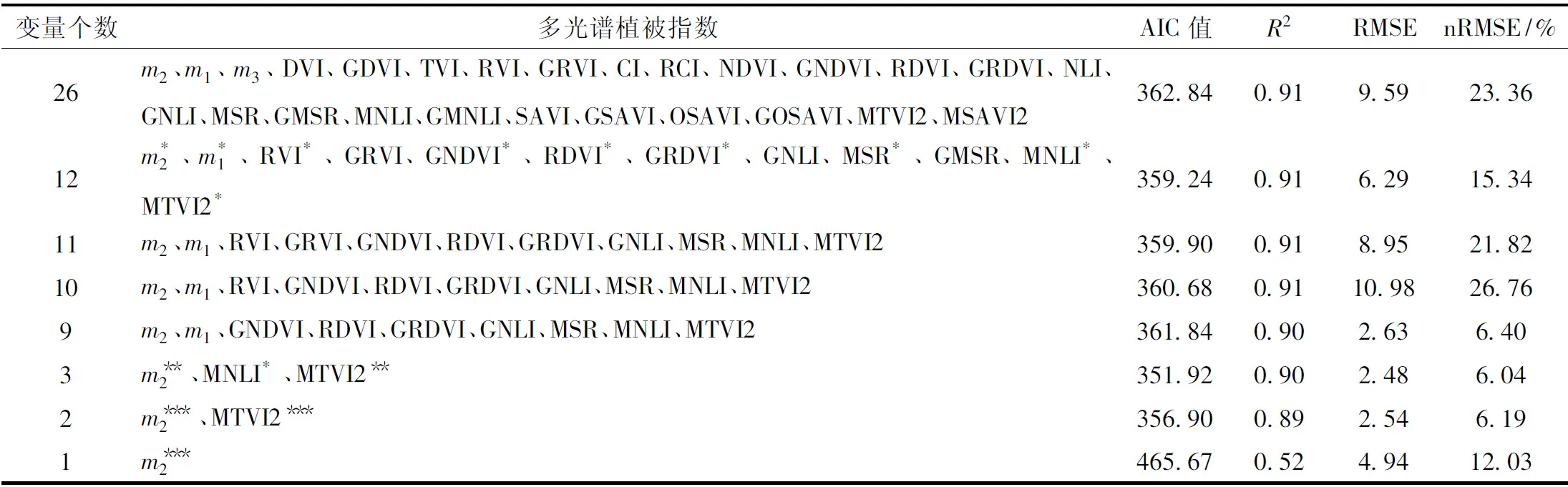
表10 多光谱植被指数估算SPAD值的逐步回归分析模型
为了筛选较优的多光谱植被指数逐步回归分析模型,综合考虑逐步回归分析模型的评价指标,得到综合精度较好的逐步回归分析模型,包含3个输入变量(m2、MNLI和MTVI2)和2个输入变量(m2和MTVI2),估算模型的AIC值、R2分别为351.92、0.90和356.90、0.89;模型验证的RMSE、nRMSE分别为2.48、6.04%和2.54、6.19%。利用实测SPAD值与模型估算的SPAD值进行对比分析,结果如图4所示,3个输入变量和2个输入变量的模型预测值与实测值的R2都为0.89,表明模型预测值与实测值具有较好的一致性。
2.4.3可见光植被指数与多光谱植被指数相结合指数
将可见光植被指数与多光谱植被指数相结合指数以及SPAD值作为逐步回归模型的输入变量,构建SPAD值的逐步回归估算模型,并计算模型输入变量的显著性水平、模型的AIC值和R2,结果如表11所示。其中,估算模型AIC值在352.40~487.06之间,R2在0.36~0.91之间。
为了验证SPAD值可见光植被指数与多光谱植被指数相结合指数的逐步回归估算模型的精度和稳定性,将估算模型预测的SPAD值与实测SPAD值的RMSE和nRMSE作为评价指标,结果如表11所示。结果表明,RMSE在2.32~4.65之间,nRMSE在5.64%~11.33%之间。

表11 可见光与多光谱相结合植被指数估算SPAD值的逐步回归分析模型
为了筛选较优的可见光植被指数与多光谱植被指数相结合指数的逐步回归分析模型,综合考虑逐步回归分析模型的评价指标,得到综合精度较好的3个逐步回归分析模型,分别包含7个输入变量(MGRVI×GNDVI、GRVI×GNDVI、PPR×GNDVI、VARI×GNDVI、IKAW×GNDVI、GRRI×GNDVI、RBRI×GNDVI)、5个输入变量(MGRVI×GNDVI、GRVI×GNDVI、PPR×GNDVI、IKAW×GNDVI、RBRI×GNDVI)和3个输入变量(GRVI×GNDVI、PPR×GNDVI、RBRI×GNDVI),估算模型的AIC值、R2分别为352.95、0.91,355.88、0.90,358.14、0.89;模型验证的RMSE、nRMSE分别为2.32、5.64%,2.38、5.80%,2.52、6.14%。利用实测SPAD值与模型估算的SPAD值进行对比分析,结果如图5所示,7个输入变量、5个输入变量和3个输入变量的模型预测值与实测值的R2分别为0.89、0.89和0.88,表明模型预测值与实测值具有较好的一致性。
2.5 基于随机森林回归分析方法估测SPAD值
分别将可见光植被指数与b、g、r,多光谱植被指数与m2、m1、m3,可见光植被指数与多光谱植被指数相结合指数以及SPAD值作为随机森林回归模型的输入变量,构建SPAD值的随机森林回归估算模型,并计算模型的R2,结果如表12所示,可见光植被指数与多光谱植被指数估算模型的R2均为0.88,可见光植被指数与多光谱植被指数相结合指数估算模型的R2为0.90。
表12 不同植被指数类型的随机森林回归分析模型估测SPAD值精度对比
为了验证SPAD值可见光、多光谱和可见光与多光谱相结合植被指数的随机森林估算模型的精度和稳定性,将估算模型预测的SPAD值与实测SPAD值的RMSE和nRMSE作为评价指标,结果如表12所示,可见光、多光谱和可见光与多光谱相结合植被指数验证模型的RMSE、nRMSE分别为2.67、6.51%,3.08、7.50%,2.51、6.12%。利用实测SPAD值与模型估算的SPAD值进行对比分析,结果如图6所示,可见光、多光谱和可见光与多光谱相结合植被指数的模型预测值与实测值的R2分别为0.85、0.84和0.88,表明模型预测值与实测值具有较好的一致性,可见光与多光谱相结合植被指数的估测模型的稳定性更高。
3 讨论
利用遥感技术进行作物长势信息的监测是精准农业研究的热点[9,13-15,43],然而,关于不同类型遥感数据相结合进行作物长势信息监测的研究较少,不同类型遥感数据能获取更多维度的作物长势信息,将多维信息相结合能够进一步提高作物长势信息估测模型的精度和稳定性。
本文基于冬小麦无人机可见光和多光谱影像提取可见光和多光谱植被指数进行冬小麦叶片SPAD值的估算,其中单个可见光植被指数RBRI和IKAW与SPAD值具有较高的相关性,估算模型的R2分别为0.87和0.86,模型验证的RMSE、nRMSE分别为2.77、6.75%和2.80、6.81%;单个多光谱植被指数GDVI、GRVI、CI、GNDVI、GRDVI、GNLI、GMSR、GMNLI、GSAVI和GOSAVI与SPAD值具有较高的相关性,GNDVI估算模型的R2为0.90,模型验证的RMSE和nRMSE分别为2.54和6.19%,具有最高的模型估算精度。逐步回归模型中,最优可见光植被指数的逐步回归估算模型包含5个输入变量,估算模型的R2为0.90,模型验证的R2、RMSE和nRMSE分别为0.86、2.66和6.47%;最优多光谱植被指数的逐步回归估算模型包含3个输入变量,估算模型的R2为0.90,模型验证的R2、RMSE和nRMSE分别为0.89、2.48和6.04%。随机森林回归模型中,可见光植被指数估算模型的R2为0.88,模型验证的R2、RMSE和nRMSE分别为0.85、2.67和6.51%;多光谱植被指数估算模型的R2为0.88,模型验证的R2、RMSE和nRMSE分别为0.84、3.08和7.50%。表明基于可见光和多光谱植被指数进行冬小麦叶片SPAD值的估算,估算模型精度整体上高于验证模型,仅用可见光或多光谱植被指数,获取的作物信息有限,模型预测精度受到一定程度的限制。
单个可见光与多光谱相结合植被指数CIVE×GNDVI和b×GNDVI与SPAD值具有较高的相关性,估算模型的R2分别为0.89和0.85,模型验证的RMSE和nRMSE分别为2.55、6.21%和2.55、6.22%。最优可见光与多光谱相结合植被指数的逐步回归估算模型包含7个输入变量,估算模型的R2为0.91,模型验证的R2、RMSE和nRMSE分别为0.89、2.32和5.64%。可见光与多光谱相结合植被指数的随机森林回归估算模型的R2为0.90,模型验证的R2、RMSE和nRMSE分别0.88、2.51和6.12%。这与文献[15-18]具有基本一致的研究结果。
研究发现,近红外与绿影像灰度组合的植被指数与SPAD值的相关性明显高于近红外与红影像灰度组合的植被指数,这与文献[43]具有较相似的研究结果。
4 结论
(1)可见光植被指数IKAW和RBRI与SPAD值具有较好的相关性,估算模型的R2分别为0.86和0.87;多光谱植被指数GNDVI、CI、GMSR和GOSAVI与SPAD值具有较好的相关性,其中GNDVI估算模型的R2为0.90,CI、GMSR和GOSAVI估算模型的R2为0.89;可见光植被指数(CIVE)、蓝通道影像灰度b分别与多光谱植被指数(GNDVI)相乘而结合的指数与SPAD值具有较好的相关性,估算模型的R2分别为0.89和0.85,其模型验证的RMSE、nRMSE分别为2.55、6.21%和2.55、6.22%。
(2)近红外与绿影像灰度组合的植被指数,GDVI、GRVI、CI、GNDVI、GNLI、GMSR、GMNLI、GSAVI、GOSAVI与SPAD值具有较好的相关性,估算SPAD值的模型R2在0.81~0.90之间,模型验证的RMSE在2.54~3.28之间,nRMSE在6.19%~7.98%之间,表明近红外与绿影像灰度组合的植被指数对SPAD值更敏感。
(3)可见光植被指数与多光谱植被指数相结合指数的逐步回归和随机森林回归模型估算SPAD值的精度和稳定性高于仅用可见光植被指数或多光谱植被指数。其中,可见光植被指数与多光谱植被指数相结合指数的最优逐步回归估算模型的R2为0.91,模型验证的R2、RMSE和nRMSE分别为0.89、2.32和5.64%;可见光植被指数与多光谱植被指数相结合指数的随机森林回归估算模型的R2为0.90,模型验证的R2、RMSE和nRMSE分别为0.88、2.51和6.12%,具有较好的估算结果。这表明将无人机可见光和多光谱植被指数相结合估算冬小麦叶片SPAD值,与仅用可见光植被指数或多光谱植被指数相比,估算精度更高,模型稳定性更好,可为冬小麦的长势监测提供更可靠的监测方法。