基于标志物影像的导航方案设计
2021-08-24翟辉琴郭海涛魏旭东路凌芝
翟辉琴,郭海涛,魏旭东,路凌芝
(1. 32269部队,甘肃 兰州 730030;2.信息工程大学地理空间信息学院,河南 郑州 450052)
目前常用的导航系统主要是依靠GPS、北斗等卫星信号进行定位,但卫星定位易受环境因素的影响,在阻挡对空视线的环境中,将受到阻碍,从而无法为用户提供导航定位的服务[1]。战争期间,信号还会被干扰。而基于标志物影像的单人手持平台,具有重量轻、成本低、尺寸小、功耗低以及大众化等优点,为卫星导航定位的缺点提供了新的补充思路,本方案正是在这种情况下产生的。该方案主要用于单个人员的自主导航和实时定位,其应用对象非常广泛,包括普通行人、紧急救援人员、野外勘测工作者及探险者。
1 方案设计
该方案通过单人在陌生地域下利用手机对周边标志物拍摄一系列影像,首先利用结合卷积神经网络与集成学习的分类算法对现时拍摄的标志物影像进行自动场景分类,然后将该标志物影像与预存在手机上的带地理编码的同类标志物基准影像精确匹配,精确匹配采用基于改进ASIFT的具有仿射和尺度不变性的匹配算子进行,最后依据匹配结果确定地理位置。对于标志物不太明显的地区,可以更换方位或标志物多次进行上述拍摄、分类和匹配,综合匹配结果以获取更为可靠的定位结果。确定地理位置后,结合目的地的位置,确定行进方向和路线,流程如图1所示。该方案具有成本低廉、便于普及、灵活机动、适应性强、自动化程度高、易与其他导航手段互补使用等 特点。
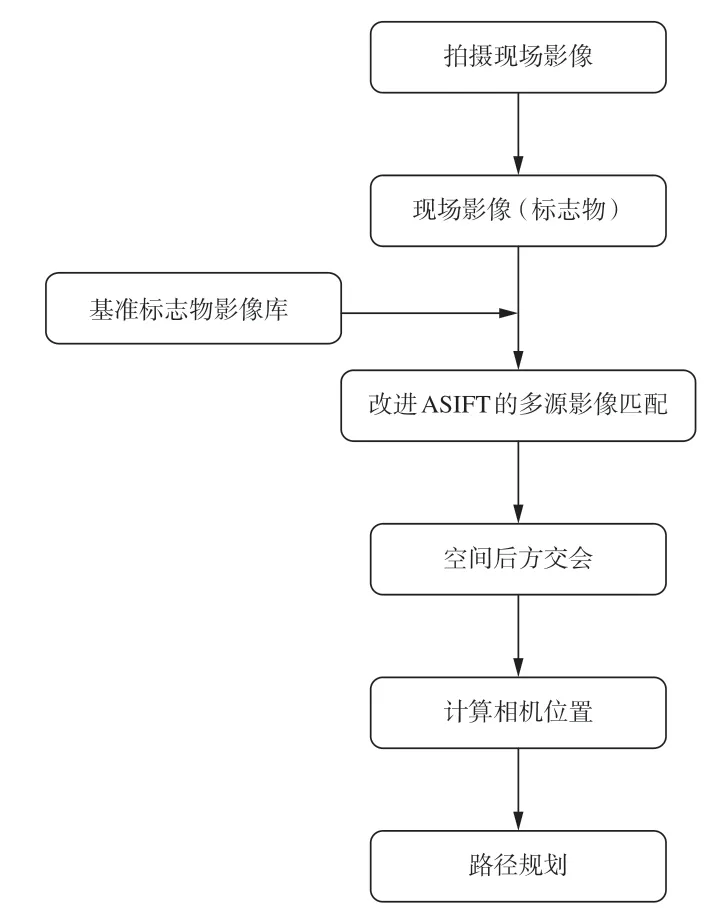
图1 方案流程图
基准标志物影像可以预先制备,制备可以到实地拍摄。利用相机、平板、手机拍摄或使用倾斜角较大的侦察卫星影像或无人机影像。值得注意的是,所制备影像必须具备地理编码。方案的特点如表1所示。
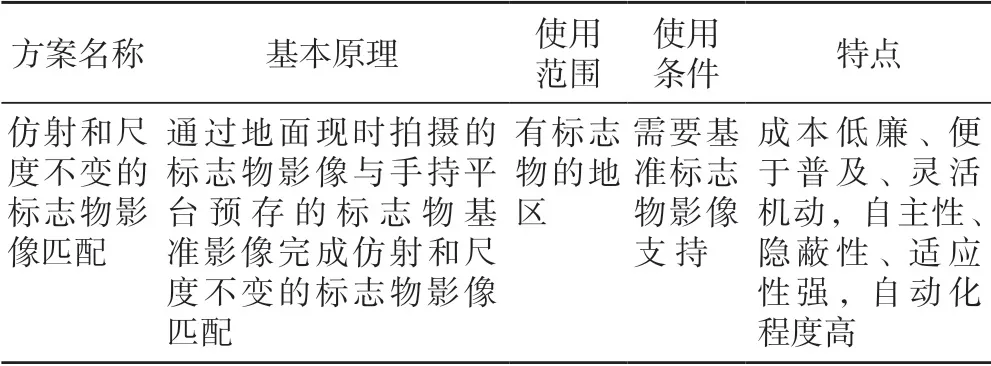
表1 方案的特点
通过理论分析和初步试验,此方案的导航定位精度取决于标志物的位置精度,能够满足导航定位的相关要求。
手持平台建议采用华为、小米等智能手机,其核心性能参数建议不低(或相当)于表2中的描述。

表2 单人手持平台核心性能参数
2 技术实施
2.1 序列影像的获取
此方案采取仿射和尺度不变的标志物影像匹配方案,只需要对着标志物或者场景较大的地面拍摄清晰的影像即可,建议更换位置拍摄不少于3张影像。
2.2 结合卷积神经网络与集成学习的影像场景分类
单人可以在陌生地域寻找周围的标志性地物拍摄影像,与预存在手机等手持平台上的基准影像相匹配从而确定自己的位置。这种标志性地物可以是水库、湖泊、水井、道路交叉口、教堂、清真寺、敖包、标志性建筑等地物。这些标志性地物的多视角影像和地理位置需要预先存贮到手机等手持平台中。首先通过结合卷积神经网络与集成学习的影像场景分类算法自动识别所拍摄地物的类型(例如湖泊),算法自动在手机等手持平台中搜索所有可能的这种类型的地物的影像(已经做过类型标识),然后通过影像匹配来完成现时拍摄影像与基准影像的多尺度匹配。
影像场景分类是指根据影像上不同影像块的特点或其所覆盖地面区域的功能,将各个影像块划分为若干类别,如桥梁、寺庙、湖泊等。通过对现时拍摄影像的场景分类,然后将该标志物影像与预存在手机上的带地理编码的同类标志物基准影像精确匹配,缩小了匹配时的搜索范围,提高了效率。
目前,基于卷积神经网络的影像场景分类算法在精度和效率上已经大大超越了传统算法,但训练一个完整的卷积神经网络依赖于数量巨大的训练数据,参数多、训练过程复杂。标注大量训练数据需要耗费大量的人力物力,训练数据的缺乏是制约场景分类性能的主要因素之一。针对上述问题,基于手机等手持平台的存储和运算能力,引入卷积神经网络、迁移学习与集成学习的思想,利用一种结合卷积神经网络与集成学习的遥感影像场景分类算法[2-5],该方法综合利用多种深层卷积神经网络所提取的高度抽象的语义特征,在较少训练数据情况下,可实现较高的场景分类 精度。
该分类算法主要利用了迁移学习和集成学习的思想,通过构建集成学习分类器对深层卷积神经网络提取影像的特征进行分类。该算法主要包括预处理、基于迁移学习与卷积神经网络的遥感影像特征提取、集成学习3个主要步骤。
2.3 仿射和尺度不变的多源影像匹配
陌生地域现时拍摄影像与标志物基准影像不可避免地存在平移、旋转、缩放及其他变形(如仿射变换)等差异,寻求一种能够顾及上述变形的改进ASIFT匹配方法来完成两者的稳健匹配。实现过程包括建立图像库、影像预处理、分块粗匹配、改进的ASIFT精匹配等。下面重点介绍建立图像库和改进的ASIFT精匹配两个步骤。
2.3.1 建立图像库
在手持平台中建立定位图像库,图像库标注图像准确的位置坐标和方向信息,后期通过特征提取、场景建模等将相应的特征、场景类别信息加入图像库中。因此,完整的图像库中存有图像及其场景、位置、方向信息、图像特征,以及用于场景分类的判别信息。单人在陌生地域导航定位时,由手持平台自动在图像库中寻找与现时拍摄照片同类型并有最佳匹配的图像,并将其标注的位置等信息反馈予人员。
2.3.2 改进的ASIFT精匹配
ASIFT能够准确的模拟由摄像机光轴取向变化而引起的所有扭曲变形。模拟3个参数:尺度、摄像机经度和纬度。虽然倾斜变形和模糊无关而导致其不可逆,但是可以通过数字模拟正交方向上一样大小的倾斜值来弥补尺度大小的变化。对于同样遇到此问题的数字归一化问题,ASIFT模拟了完全仿射不变[6]。
利用ORSA 算法剔除初始匹配点集的错误匹配点对。RANSAC 算法利用随机抽样得到匹配点坐标,估计影像间的基本矩阵作为几何约束模型来剔除外点。当图像中存在大量重复纹理结构时,由于特征区域结构相似,初始匹配中容易出现错误匹配点对。为了解决这个问题,本文在ORSA 算法的基础上,利用以单应矩阵作为几何线性约束模型的RANSAC算法进一步剔除剩余匹配中可能的错误匹配[7]。
2.4 基于匹配结果的人员定位和导航
基于上述匹配结果,利用手机预存的带地理编码的基准标志物影像确定单人的位置;结合目的地的位置和地形图数据,确定行进方向和路线。
3 结 语
本文针对无卫星信号环境下的室外导航提出的设计方案,在具体实施过程中还有很多细节需要改进。实现本方案,可以为单人和执行急救任务的人员在室内或者利用卫星信号无法进行导航的地方解决自主定位的问题,并利用获得的导航定位信息重新规划路径,有效降低人员生命危险,提高任务成功率。
