基于UG 的自走式大白菜收获装置关键部件的研究与设计
2021-08-20朱容芳
朱容芳
(广西大学 机械工程学院,530004,广西南宁)
随着种植规模化、集约化,传统的人工收获方式已经无法满足大白菜大面积生产的需要[1]。Kanam M等[2]人研制出了一种大白菜收获机,主要对大白菜收获机的拔取装置和切割装置进行了研究设计,采用旋转的圆盘切刀切掉包叶,不利于大白菜的保存。Hachiya M 等[3]人研发一种甘蓝收获机械,通过双圆盘拔取装置将甘蓝从土壤里拔出后,向后续工作装置传输,先经过割刀进行切根处理,不适用于中小型规模种植的收获。因此,针对小型农户、小型农场的白菜收割需求,基于三维建模软件UG 设计出一种自走式大白菜收获装置,以减轻劳动强度,节省人工,对提高丘陵地区的小规模种植的白菜收获效率具有重要意义。
1 设计要求及性能指标
1.1 设计要求
所设计的大白菜收获装置要求针对小田地、丘陵地区的中小型农场、中小型农户、小型种植基地等,故其体积、质量不能太大,成本不能太高,需要尽量降低成本,以免增加农户的经济负担。所设计的大白菜收获装置在技术上需要满足以下要求:①能够安全有序地收获大白菜;②能够精确切割大白菜并分别计数;③不应造成白菜的大面积损伤;④能够快速准确地切割下大白菜并进行收集;⑤结构可靠、安全,易于操作与维修。
1.2 性能指标
达到以下要求:切割准确率100%;收获准确率>99%;收获速度>45 棵/min。
2 结构与原理
利用三维建模软件UG 所设计的大白菜收获装置结构简图如图1 所示,其原理是:装置以一定速度前进,单行收获白菜,压顶轮1 压紧白菜顶部,圆盘切刀3 从茎上部直接将白菜从土地里切割下来,脱离了土壤的白菜在拨叶轮的作用下倾倒在水平传送带6 上,由机构的两侧传送带4 和5 扶正传输,而后传送到后面的收集装置中,如此循环工作。为了检测白菜收获效率,在传送带末端添加计数传感器。
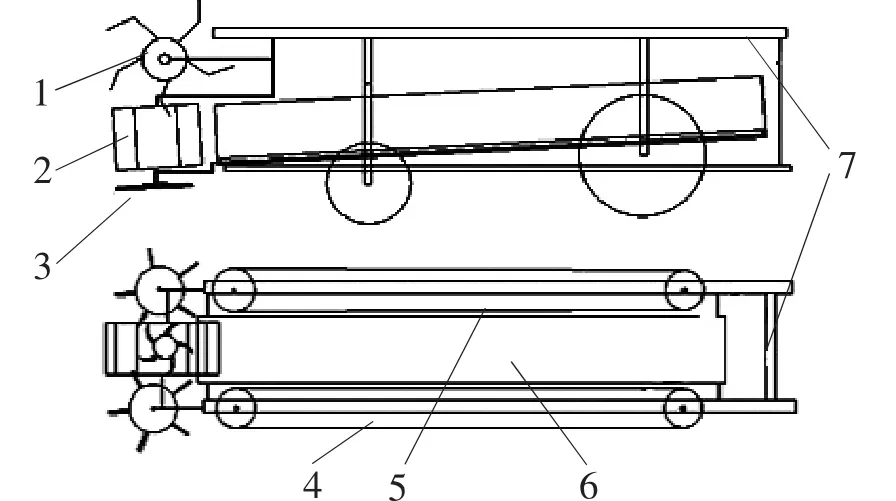
图1 大白菜收获装置结构简图
3 关键部件的设计
3.1 切割装置
根据对大白菜特性的研究,本设计采用圆盘回转式的割刀。圆盘回转式切刀绕其轴线在水平面内作旋转运动,割茬较为齐整,同时工作平稳,震动较小。考虑到圆盘切割器的结构组成和功率消耗分布,为了减少损耗,结合本设计技术要求和收获切割效率,根据装置行走速度为0.5 m/s,故将切割器转速设计为n=100 r/min,刀片数量设计为m=5。
(1)刀片结构如图2 所示。
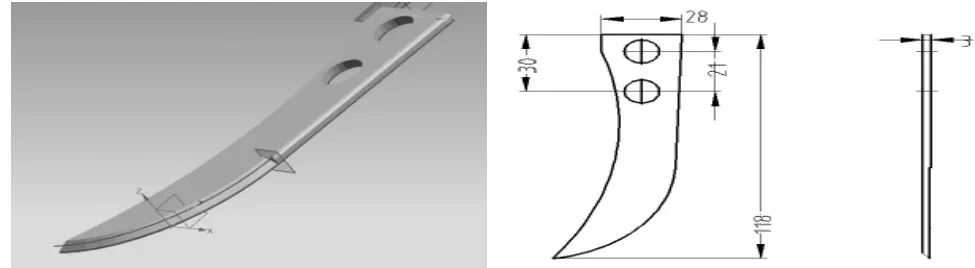
图2 刀片结构图
(2)为了满足设计需求,合理配置刀具,安全安装刀具,刀盘设计如图3 所示。
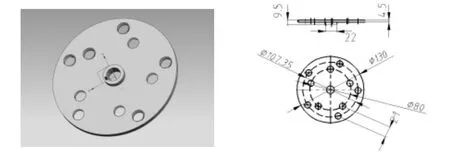
图3 刀盘结构图
(3)将5 把刀片用10 个M12 螺栓安装固定在刀盘上,并配置垫片,如图4 所示。
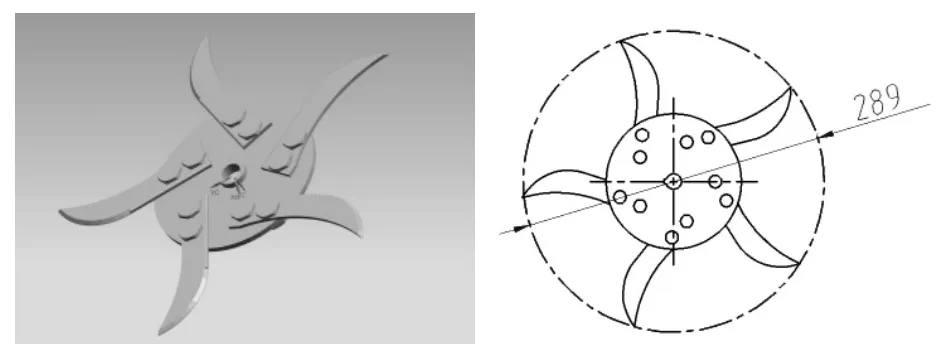
图4 圆盘和刀片装配结构图
3.2 压顶轮
压顶轮的作用在于在切割时给予白菜一个压顶支撑保护作用,并且压顶轮在旋转前进的过程中能够对白菜的向后传输运动起到一个辅助作用。压顶轮位于割刀的正上方,轴线平行于地面,能够协助割刀切割白菜,其材料选用橡胶,由于橡胶与钢摩擦系数较大,故每片轮叶上使用两颗M8 的螺钉将其固定在轮毂上,实现轮叶与轮毂的连接。装置前进速度0.5 m/s,白菜间隔为420 mm,即切割白菜的速度为1.19 棵/s,即71.4 棵/min,压顶轮的工作要求是每转一圈需要压顶5棵白菜,切割5 棵白菜所需时间为4.2 s,即压顶轮旋转一周所需时间4.2 s,即转速为14.3 r/min。压顶轮的结构如图5 所示。
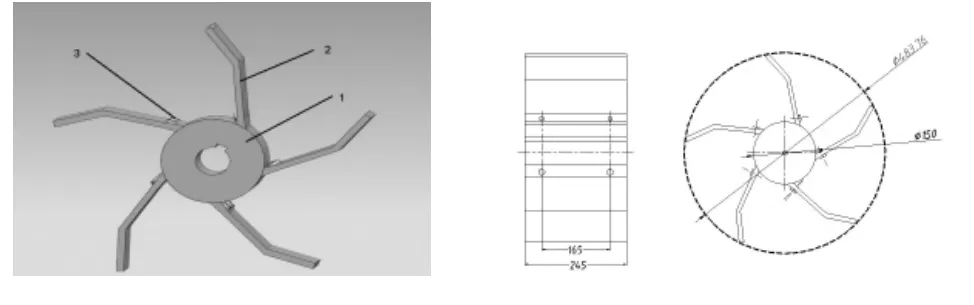
图5 压顶轮结构图
3.3 拨叶轮
拨叶轮的作用在于将切割下的白菜传送到传输装置中,其结构和材料与压顶轮相似,在此不作赘述。拨叶轮位于圆盘割台的两侧,为了达到最好的工作状态以及不影响割刀的正常工作,拨叶轮的安装位置应位于割刀上方30 mm 处。根据拨叶轮的结构特征,计算出拨叶轮的速度应与压顶轮的速度保持一致,转速均为14.3 r/min,保证白菜均匀受力。拨叶轮的结构如图6 所示。
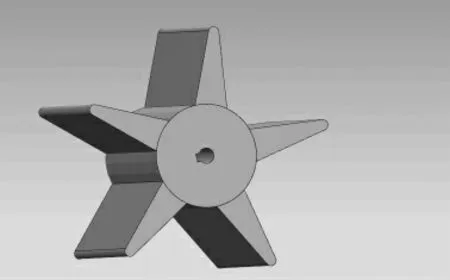
图6 压顶轮结构图
3.4 传输装置
白菜被切割以后,由拨叶轮和压顶轮共同作用将其向后传送至传输装置。传输装置主要由两部分组成。第一部分是水平传送带,其处于未工作状态时平行于地面,采用宽度220 mm 的普通平带,如图7 所示;带轮直径为63 mm,转速为303 r/min 。第二部分是位于割刀两侧的传送带,为了减少对白菜的损伤以及能够更快速简便地传送白菜至收集机构,将两侧的传送带面设计为间隔带椭圆形凹面,根据白菜的形态特征,凹面椭圆的长轴近似为白菜的高度即500 mm,短轴近似为白菜的直径即200 mm,凹面深度20 mm,如图8 所示;两条皮带的内侧带面的距离略小于白菜的直径,以便能夹紧白菜;带轮直径为140 mm,转速为136 r/min。
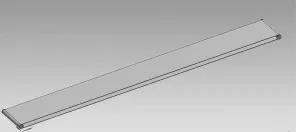
图7 水平传送带

图8 割刀两侧传送带
整个传输装置的工作原理是:当白菜被切割后由拨叶轮和压顶轮传送至水平传送带端部处时,由于拨叶轮和压顶轮的持续作用,白菜将倾倒在水平传送带上,由于水平传送带具有1 m/s 的初速度,两侧带凹面的传送带与水平传送带具有相同的速度为1 m/s,所以白菜能够在传送带上快速完成传输过程。在传送带末端与收集装置的中间区域连接有计数器,以便检测白菜的收获效率。
4 整机装配
根据前面的研究设计结果,得到了各关键部位以及割台的设计图,使用三维建模软件UG 软件进行虚拟设计,得到的装配图如图9 所示。
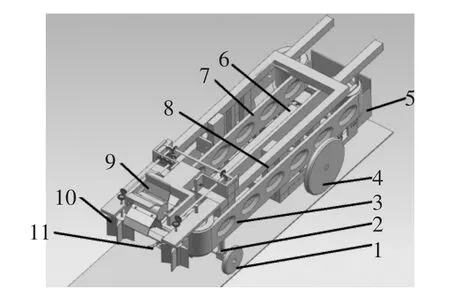
图9 大白收获切割装置装配图
为了方便运输和便于管理,将大白菜收获机设置为两个状态——工作状态和非工作状态,两者的转换依靠固定在机架上的液压千斤顶手动操作。处于工作状态时,前轮行进方向与割刀工作平台不平行,如图10 所示;处于非工作状态时,前轮行进方向与割刀工作平台平行,如图11 所示。

图10 工作状态下的装置图
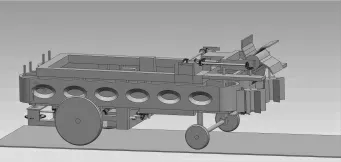
图11 非工作状态下的装置图
通过压顶轮、拨叶轮和圆盘割刀的共同作用,将白菜从土地里面切割下来并进行传送。确定压顶轮、拨叶轮的转速为14.3 r/min,整机前进速度为0.5 m/s,割刀转速为100 r/min,通过计算,切割白菜的速度为1.19棵/s,传输速度为1.19 棵/s,满足设计要求中的效率要求;带凹面的具有弹性的皮带,在传输过程中既保护了白菜不受损伤,又能够增加传输过程中摩擦力,降低功率,最大限度保持白菜的完整性;计数器能够为检测准确性和效率提供数据来源。整个设计满足技术要求。
5 结语
以白菜收获为研究对象,根据白菜的收获效率及损耗要求,确定大白菜收获装置的技术指标,据此确定收获装置的工作原理和技术方案,利用三维建模软件UG 设计了自走式大白菜收获装置的关键部件——切割装置、压顶轮,拨叶轮、传输装置的结构、尺寸及工作速度,通过计算,结果表明整个设计满足技术要求。此设计对针对小型农户、小型农场的白菜收割机械的研究具有借鉴意义。
