气动仿生蜈蚣外管路攀爬机器人研制
2021-08-18吴立波
吴立波
(邯郸职业技术学院 机电工程系,河北 邯郸 056001)
引言
管路机器人普遍应用在各种危险的工作环境中代替人工作业,极大降低了人工检测的风险和作业成本。近些年,出现了很多管路内机器人,搭载相应的设备,实现管内壁面的清洗、探伤、管路敷设、油漆等多种功能,极大减少了人工,提高了管路作业效率。如,全气动管路检测机器人,实现了在不同直径管路的撑壁行走[1];自适应移动机构的管内探查机器人,能够在管路直径改变时,自动地改变行走方式,提高越障能力[2];三轴差速式管路机器人,可适应转弯结构处的运动[3]等。但管路外作业与管路内作业在技术实现上有着很大的不同,需要更好的附着力确保作业的可靠性。对于大直径管路,多采用吸附方式。对于小直径管路,多采用抱夹攀爬形式,技术上实现难度较高,造成推广较难。
近些年,开展了很多相关的攀爬机器人研究,目前研究比较多的有爬绳机器人[4-6]、爬杆机器人[7-10]、爬壁机器人[11-12]等,管路外攀爬应用场合要求更复杂,难度更大。
根据河北省某市政部门提供的技术要求,以DN63的管路为攀爬对象,该管在自来水、天然气、电力等行业应用广泛。本研究提出了气动仿生蜈蚣的攀爬策略,借助Pro/E进行虚拟样机设计和分析,分析了脚趾应力应变和载荷向量,并进行优化设计,最后通过实验测试,验证了本研究提出的方法在外管道侦测勘察应用上的可行性。
1 机器人结构设计
多足结构是很多爬行机器人采用的通用结构,可有效提高爬行的效率和稳定性。蜈蚣通过多足交替的运动,实现前后的爬行,如图1所示。在爬行过程中,一部分脚趾着地做支撑,另外一部分脚趾离地向前,周期性交替运动。在攀爬过程中,这种运动方式,保持了身体的平衡,确保有很好的地面附着能力。参照蜈蚣的多足结构,将这种运动方式运用于管路外攀爬。

图1 蜈蚣多足结构示意图
采用气动为主要驱动方式,气力驱动可以有效提升管路抱夹力,防止坠落,具有缓冲功能,成本低廉、速度快、无污染,同时还可适应雨雪等恶劣天气环境。此外,在燃气和自来水泄漏等危险作业场合,相比较电力驱动,适应性更强,安全性更高。
仿生蜈蚣整体结构如图2所示,机器人共有5对脚趾,1,3,5为主脚趾,主脚趾上安装有电控模块、电磁阀、滑轨等部件;2,4为副脚趾。在主副脚趾上安装有手指气缸,并配有扇形脚趾,内部轮廓与管外形匹配,主副脚趾的手指气缸与气缸杆机械连接,在气缸的驱动下,主副脚趾可前后往复运动。
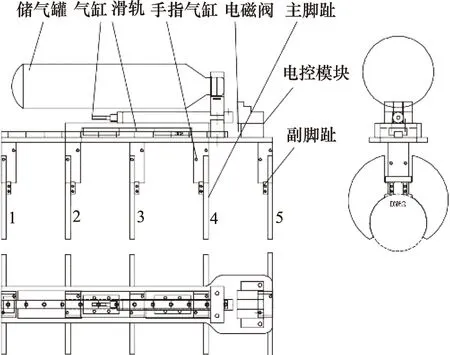
图2 气动仿生蜈蚣整体设计
如图3所示,气泵工作将压缩气体存入储气罐,4G控制模块可接受远程控制信号,当有控制信号输入后,单片机系统驱动电磁阀顺序工作,驱动手指气缸的开闭,主副脚趾交替运动,脚趾抱夹管路爬行。

图3 气路控制系统
2 虚拟样机的建立
通过Pro/E的ASSEMBLY组建分析模块,建立整台机器人虚拟样机模型,如图4所示。通过优化结构方案,控制整体重量,通过计算,整体体积为4.3764164×105mm3,整体框架采用3D打印材质PLA,支撑板和脚趾采用甲基丙烯酸甲酯单体聚合材料(亚克力)制作,输入相应密度,获得材料整体质量为1.09 kg,机器人整体质量较轻。

图4 虚拟样机结构
3 受力分析及结构优化
脚趾是机器人重要的零部件,形状复杂且数量多,为了获得更好的抓握效果,要求重量轻、可靠性好,才可以保证机器人的可靠攀爬。建立如图5所示的受力模型,脚趾初定为扇形的结构,内弧与管料的外轮廓吻合,气缸工作时使两侧的脚趾向内侧收缩,夹紧管料,此时脚趾将受到气缸的水平拉力F1和管料的推力F2作用。
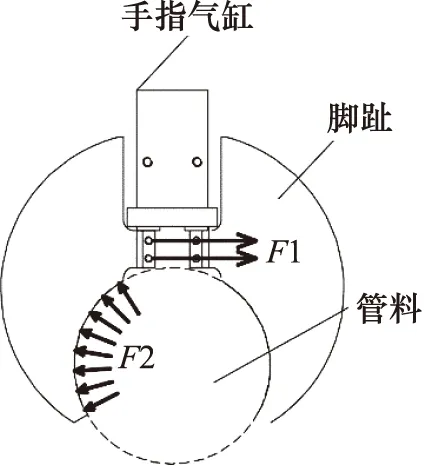
图5 受力模型
选择MHZ2-10手指气缸作为脚趾驱动,该气缸在0.8 MPa压力下可产生1.7 N的力。在Mechanica中建立如图6所示的有限元模型,与气爪连接的2个通孔施加水平方向载荷,在与管料内侧连接处限制位移约束。采用自适应网格划分方法,将模型划分为1397个网格。

图6 有限元分析模型
计算结果如图7所示,通过对1.7 N作用力的30%,60%和100%3种受力状态下的计算结果分析可以看出,最大的受力点主要集中在脚趾与气缸的连接孔和与管料接触曲面靠近安装孔处。结合图8的载荷矢量图可以看出,当安装孔受力时,将使材料产生拉应力变形,在连接孔内侧和管料接触曲面棱角处形成了应力的集中,以此为中心形成发散的受力分布,脚趾外侧应力应变相对较少,最大和最小受力相差近万倍,没有形成较好的等强结构。此外,脚趾对于管料夹握力主要依靠与离安装孔近处接触保证,距离安装孔越远,应力越小,夹握力变小,加上弹性变形影响,不能通过增大脚趾接触面积的方式来提高夹握的可靠性。

图7 应力应变图

图8 载荷向量图
通过以上分析,对结构做如下改进,一是减少扇形脚趾外轮廓尺寸,最大限度减少材料使用,确保机器人轻量化;二是管料接触曲面靠近安装孔处进行R5的圆角过渡,减少应力集中,可有效提升夹握力的均匀分布;三是增大安装孔处壁厚,有效增强受力能力,减少形变。
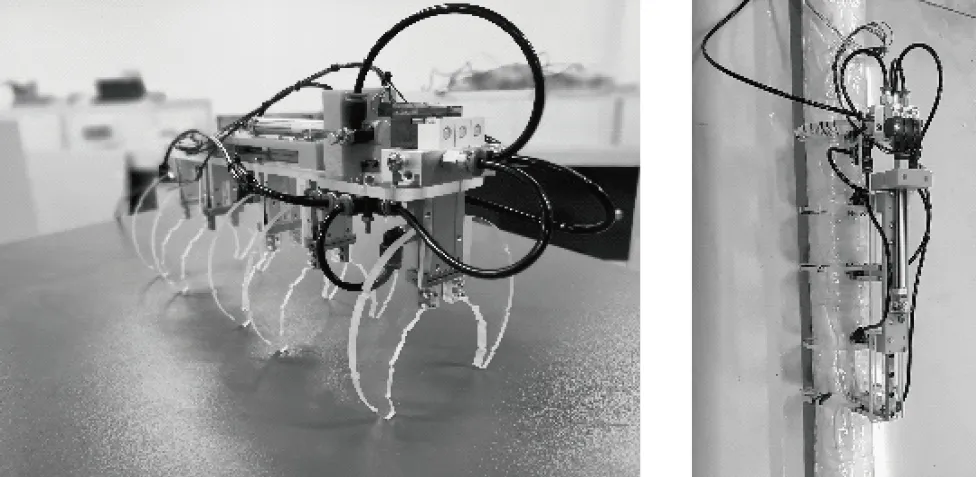
图9 实验样机 图10 实验场景
4 实验测试
制作实验样机如图9所示,采用3D打印做机器人框架支撑,选择甲基丙烯酸甲酯单体聚合材料做脚趾,有效减少机器人整体重量,选用二位三通微型高频电磁阀做气动控制,设置如图10所示的攀爬实验场景,气压0.8 MPa,顺序动作时间间隔0.4 s,选择竖向布置DN63的管道为攀爬对象,进行试验测试。通过多次测试发现,优化后的结构可有效减少设备重量,提升攀爬抓握的效果。
5 结论
通过以上的方案设计、优化以及实验测试,得出如下结论:
(1) 采用蜈蚣多足仿生结构作为机器人运动原型,是一种行之有效的外管路攀爬解决方法;
(2) 采用气动作为动力驱动,能有效减少整体重量,提高抓握力,提升攀爬效率,对于燃气管、自来水管等特殊场合较为适用;
(3) 本研究以DN63管道为研究对象,对于不同的管料,可设计不同的脚趾,但需通过结构的优化达到机器人最佳的工作效果。
