一体化双作用水压人工肌肉直线执行器设计
2021-08-18贾云瑞张增猛车进凯宁大勇杜洪伟
贾云瑞,张增猛,车进凯,宁大勇,杜洪伟
(大连海事大学 船舶与海洋工程学院,辽宁 大连 116026)
引言
流体驱动的人工肌肉可以分为气动人工肌肉[1]、油压人工肌肉[2]和水压人工肌肉[3]。人工肌肉由纤维编织网、弹性橡胶管和端部接头组成,在纤维编织网的约束下,向弹性橡胶管中充入流体能够产生一定的收缩力[4]。虽然气动人工肌肉具有结构简单、重量轻、输出力与自重的比值大、柔性大等优点[5],但是气动人工肌肉的输出力很低,与水压人工肌肉差距尤为明显。因此,选择水压人工肌肉作为驱动器进行设计。水压人工肌肉已经有很多学者进行了研究,YOSHINADA等[6]利用水压人工肌肉制作了三指机械手,这些肌肉的直径和长度分别为3 mm和40~60 mm,并在2 MPa的在工作压力下提供500 N的收缩力;MORI等[7]开发了一种水压人工肌肉,其外径为40 mm,长度为700 mm,且在4 MPa的工作压力下能够提供高达28 kN的收缩力;SANGIAN等[8]研制的小型水压人工肌肉外径6 mm,长度为35~80 mm,在0.25 MPa的压力下输出力达到26 N,适用于外科手术的机器人手指;安莉等[9]对水压人工肌肉的静态数学模型和工作特性也开展了研究工作。然而,单体人工肌肉仅有收缩作用,采用人工肌肉驱动的关节多采用双人工肌肉拮抗式设计[10-11],基于此,本研究采用双作用式水压人工肌肉设计直线执行器。
实验室已建立水压人工肌肉试验系统,并对编织网材料为芳纶1414,外径为30 mm,橡胶管壁厚为2 mm,初始有效膨胀长度为200 mm的肌肉样本进行测试,工作压力达到6 MPa时产生最大收缩力,约为12 kN[12]。在已研究水压人工肌肉的基础上进行改进,并设计了一个新型的直线执行器,能够完成往复运动。
1 水压人工肌肉
水压人工肌肉结构和工作原理如图1、图2所示,工作时一端闭合,另一端与高压流体介质相连,在纤维编织网的约束下,当弹性橡胶管受压时产生有规律的收缩变形,从而产生相应的收缩力和位移,即从图2的初始状态转换至工作状态。图2中,θ0为初始编织角;L0为初始有效膨胀长度;D0为初始直径;θ为当前编织角;L为有效膨胀长度;D为直径;n为单根纤维绕橡胶管的匝数;B为单根纤维的长度。
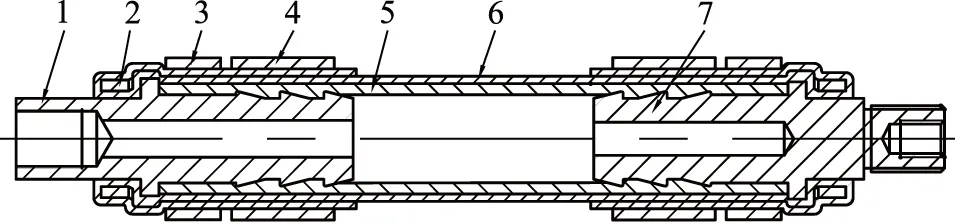
1.通水端部接头 2~4.扣压环 5.橡胶管6.编织网 7.封闭端部接头图1 水压人工肌肉结构示意图
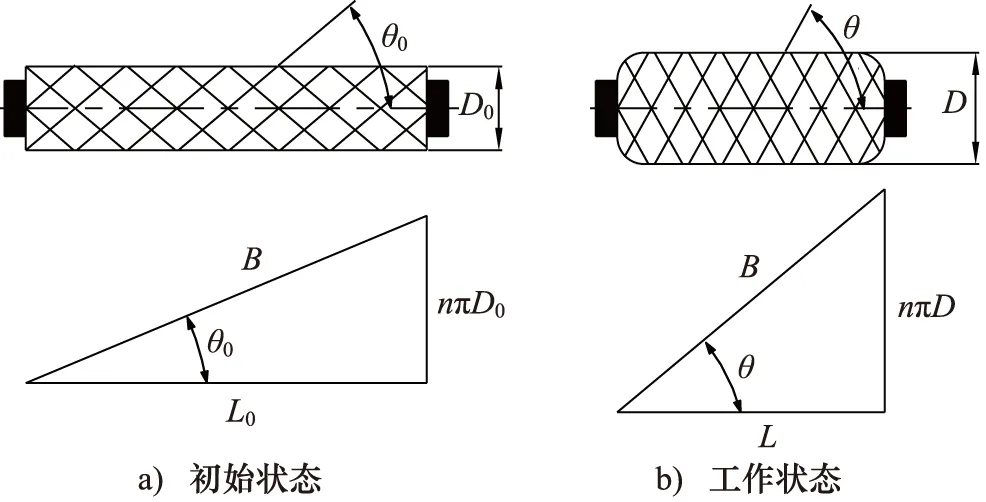
图2 水压人工肌肉工作原理图
2 双作用水压人工肌肉直线执行器
2.1 结构及工作原理
一体化双作用水压人工肌肉直线执行器结构如图3 所示,导流件内部设置相互连通的导流孔,近注水件一端外部设置导流槽,且内部设置阶梯面;注水件轴向设置通孔和连接内螺纹,内壁设置密封圈沟槽,上部设置注水孔;水压人工肌肉封闭端接头倒锥齿一端开圆柱盲孔,通水端接头非倒锥齿一端设置连接外螺纹;导流件非导流槽一端通过间隙配合伸入封闭端接头圆柱盲孔内,另一端位于通水端接头内部;芯轴端部通过间隙配合伸入导流件的导流孔中,且外表面与位于密封圈沟槽的密封圈内表面紧密贴合;注水件两端分别连接1个水压人工肌肉,水压人工肌肉、导流件和芯轴通过间隙配合使之在同一轴线上。

1.水压人工肌肉1 2.水压人工肌肉2 3.导流件4.注水件 5.芯轴图3 一体化双作用水压人工肌肉直线执行器结构示意图
水介质分别通过注水件的2个注水孔,流经水压人工肌肉通水端接头和导流件的导流槽,进入2个水压人工肌肉的弹性橡胶管中。控制2个水压人工肌肉的初始工作压力相同,使2个水压人工肌肉以同样的工作状态膨胀收缩,分别驱动水压人工肌肉内部的导流件轴向移动,使芯轴的2个端面与2个导流件的阶梯面接触;然后,改变2个水压人工肌肉的工作压力,使水压人工肌肉1的工作压力升高实现轴向收缩,水压人工肌肉2的工作压力降低实现轴向伸长;再次改变2个水压人工肌肉的工作压力,使水压人工肌肉1的工作压力降低实现轴向伸长,水压人工肌肉2的工作压力升高实现轴向收缩。通过不断改变2个水压人工肌肉的工作压力,可以实现此直线执行器端部的往复运动。
直线执行器端部的行程与水压人工肌肉的最大收缩量、芯轴长度和导流件阶梯面的深度有关。水压人工肌肉的最大收缩量的定义为,在同一个工作压力下,水压人工肌肉的轴向输出力为0时的收缩量。直线执行器端部往复运动的最大总行程为水压人工肌肉的最大收缩量。根据水压人工肌肉的原长和最大收缩量,设计芯轴的长度和导流件阶梯面的深度。直线执行器结构关于注水件对称布置时,芯轴的端面与导流件阶梯面的距离为水压人工肌肉最大收缩量的一半,使得直线执行器端部总行程达到最大。
2.2 力学分析
双作用水压人工肌肉直线执行器分为2种工作状态:轴向空载和轴向带载。水压人工肌肉输出力的理想模型为:

(1)
式中,p—— 水压人工肌肉的工作压力
ε—— 水压人工肌肉的收缩率
a,b—— 与初始编织角θ0有关的系数
ε,a,b的表达式为:
(2)
(3)
假设2个水压人工肌肉的结构参数完全一致,且忽略摩擦,进行力学分析。2个水压人工肌肉的初始工作条件为工作压力相同、收缩率相同且无外负载,双作用水压人工肌肉往复作动器处于力平衡状态,表达式为:
p1=p2=p0,ε1=ε2=ε0,
F1(ε1,p1)=F2(ε2,p2)
(4)
式中,p1—— 水压人工肌肉1的工作压力
p2—— 水压人工肌肉2的工作压力
ε1—— 水压人工肌肉1的收缩率
ε2—— 水压人工肌肉2的收缩率
改变2个水压人工肌肉的工作压力,双作用水压人工肌肉直线执行器处于非平衡状态,表达式为:
p11=p0-Δp1,p21=p0+Δp2,
ε11=ε0-Δε,ε21=ε0+Δε
(5)
F21(ε21,p21)-F11(ε11,p11)=ΔF
(6)
式中,Δp1—— 水压人工肌肉1工作压力的变化量
Δp2—— 水压人工肌肉2工作压力的变化量
Δε—— 2个水压人工肌肉收缩率的变化量
ΔF—— 直线执行器的轴向输出力
由式(6)可知,直线执行器的输出力ΔF只取决于水压人工肌肉的输出力F(ε,p)。令2个水压人工肌肉工作压力的变化量相同进行分析,即Δp1=Δp2=Δp。空载时水压人工肌肉的变化量Δp与水压人工肌肉收缩率的变化量Δε关系为:

(7)
轴向载荷为ΔF时,水压人工肌肉的变化量Δp与水压人工肌肉收缩率变化量Δε的关系为:
(8)
选取初始有效膨胀长度为300 mm,初始编织角为25°,初始直径为30 mm的水压人工肌肉进行分析。根据式(1)~式(3)可知,初始编织角为25°的水压人工肌肉的最大收缩率理论值为0.36。为了实现直线执行器端部运动行程最大化,同时保证行程的有效性,取水压人工肌肉的最大收缩率为0.30,取ε0=0.15进行理论分析,即水压人工肌肉的收缩率变化量Δε最大为0.15。带载4 kN时,水压人工肌肉不同初始工作压力下,其收缩率变化量与工作压力变化量如图4所示,收缩率变化量Δε达到0.15时,工作压力变化量如表1所示。由表1可知,基于选定的水压人工肌肉,初始工作压力在2.7 MPa以上时,直线执行器都能够输出4 kN的轴向力。

图4 不同初始工作压力下Δε与Δp关系曲线

表1 Δε=0.15,工作压力变化量 MPa
2.3 元件强度分析
针对执行器轴向输出力的有效性,对芯轴和导流件进行强度校核。由于水压人工肌肉圆周尺寸的限制,设计芯轴的直径12 mm、长度258 mm,导流件的外径16 mm、长度320 mm、阶梯面深度65 mm,芯轴和导流件的模型分别如图5和图6所示。

图6 导流件模型
芯轴和导流件在圆周方向上受到注水件和水压人工肌肉封闭端接头及通水端接头的限制,避免了压杆失稳的情况,只需校核元件的静应力强度。芯轴材料选择304不锈钢,芯轴的B端面保持固定,A端面施加4 kN的轴向负载,静应力分析结果如图7所示,芯轴的最大应力为44.13 MPa,304不锈钢的屈服强度为206.8 MPa,芯轴强度足够。导流件材料选择304不锈钢,D端面保持固定,阶梯面C受到4 kN的轴向负载,静应力分析结果分析如图8所示,导流件的最大应力为96.54 MPa,满足强度要求。根据静应力分析结果可知,芯轴和导流件材料为304不锈钢的情况下,执行器能够提供高达4 kN的轴向输出力。
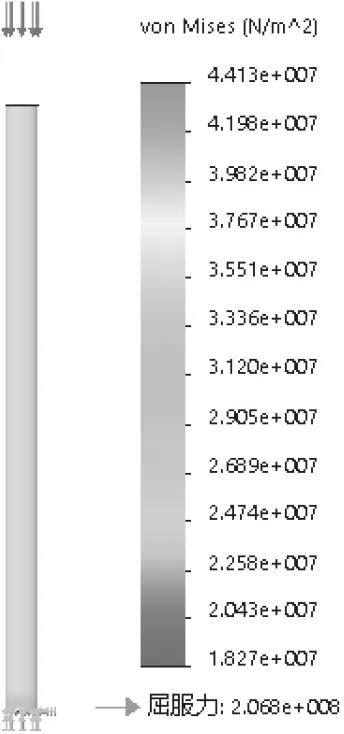
图7 芯轴强度分析
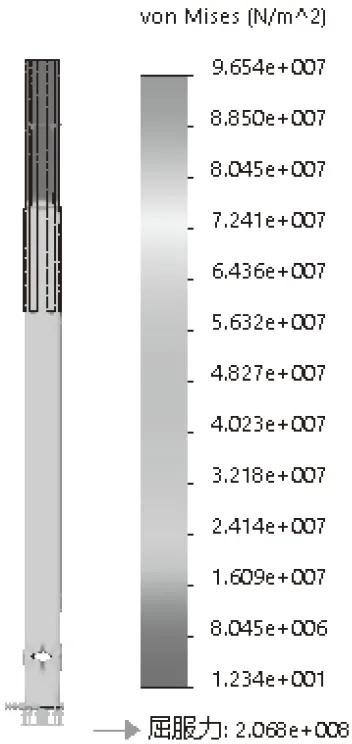
图8 导流件强度分析
3 结论
(1) 结合水压人工肌肉设计了一体化双作用水压人工肌肉直线执行器,根据水压人工肌肉的工作特性确定芯轴端面与导流件内部阶梯面距离为水压人工肌肉最大有效收缩量的一半时,使直线执行器的有效运动行程达到最大;
(2) 结合水压人工肌肉的理想模型,推导出直线执行器在带载情况下的输出力理论模型,选取初始有效膨胀长度为300 mm,初始编织角为25°,初始直径为30 mm 的水压人工肌肉,初始工作压力在2.7 MPa以上时,直线执行器都能输出4 kN的轴向力,芯轴和导流件采用304不锈钢材料,静应力分析结果表明,芯轴和导流件都能够承受4 kN的轴向负载。
