改进的Kalman融合滤波算法在无人机避障系统中的应用分析
2021-08-14杜天华徐金龙刘博章宇航许继弘
杜天华 徐金龙 刘博 章宇航 许继弘
上海机电工程研究所 上海 201109
1 无人机避障
1.1 无人机避障方式
无人机避障方式多种多样,主要包括机器视觉避障、激光超声传感器融合避障等,最近张京娟等提出了根据飞行器间测距信息对飞行器惯导定位进行校正的方法[1]。机器视觉稳定性较差不能适应多变的飞行环境,基于成本考虑激光超声传感器融合避障应用较广。单一的传感器存在较大的不稳定性,无法满足飞行阶段障碍物测距的精度要求,需要采用多数据源融合技术,获得相对精确的信息数据,得到可靠测距结果。针对无人机传感器来说,信息融合算法较多,包括自适应Kalman滤波和扩展Kalman滤波,其中,自适应Kalman滤波较为简单有效。为了提升无人机稳定性,需要从信息融合算法入手,对Kalman滤波算法适当改进。
1.2 无人机避障系统
现阶段的无人机已经不再局限单一领域,除了军事领域外,还广泛应用于民用,如何在复杂环境中,较为精准到达预定目标,是业界讨论的焦点。现实中,需要对飞行路径完整优化,借助细致算法,发挥自主避障功能,在此前提下,提升无人机应用可靠性。研究发现,动态自主避障模型作用显著,可以将碰撞判断问题分解和转化,变更为一元二次方程,合理推算出最小碰撞时间,这样便可以给实际飞行速度提供参考,遵循尽可能指向目标的避障原则,获得期望的运动速度(无人机)[2]。需要注意的是,由于引入权重因子后,会改变自身套件,增加过载约束,减少速度判断时间(最优机动速度)。
2 改进的Kalman滤波算法
在经济的全方位带动下,飞行器技术相对成熟,飞行器品牌越来越多,在这样的背景下,四旋翼飞行器逐渐普及,慢慢进入大众视野。但是该飞行器的应用,存在较大安全隐患,撞机、坠机等事故概率较高,为了提高应用水平,彻底改善飞行器避障系统问题,可以引进Kalman滤波改良算法,提高机身安全性。
Kalman滤波的基本理论:结合最小均方差法则,确定状态方程和测量方程,根据观测值和预测值完成数据实时迭代,更新模型中的参数,得出最佳估计值。
无人机距离为一维数据量,其状态转移方程和测量方程可以描述为:

方程式中: 为状态向量; 为观测向量;A为状态转移矩阵;B为控制矩阵。除此之外,H为观测矩阵;w则表示过程激励噪声; 为观测噪声。由Kalman滤波得基本假设可知:设

式中:Q表示过程激励协方差矩阵; R则指观测噪声协方差矩阵;K为卡尔曼系数。K是Kalman滤波中最重要的参数,K决定了测量值和预测值在最终估计值中的比重,R越小则证明测量值越精确,相应的测量值在最终估计值中的比重也越大。在实际测量中,相关参数Q、R、q、r等会实时变化,不断更新,并且想要准确获取难度较大,基于这样的前提,建立的模型很难确保准确性,与实际模型相差过大,导致传感器测距效果并不理想,因此如何得到准确的估计R值,同时使实际的R值尽可能小是提高测距精度的关键。采用改进的Sage_Husa自适应Kalman滤波可以降低R值不确定性带来的影响。
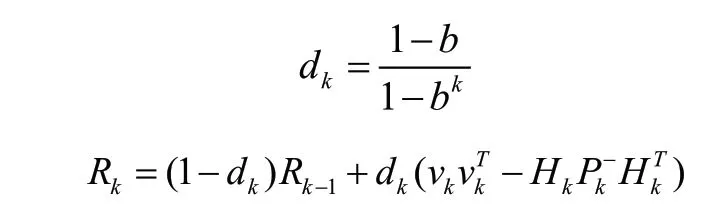
式中:b为遗忘因子,kd为由此得到的加权系数。b取值范围为0~1,可见随着滤波进行,加权系数kd越来越小,kR更多地取决于 1kR−的取值,这一过程的快慢由遗忘因子b的取值决定。事实上遗忘因子的取值受很多因素的影响,可以通过实验实际测量得到不同情况下的最佳取值。
为了提高测距的可靠性,需要对传统算法进行改进,借助自适应滤波,完成模型不断修改、更新,从而使估计值收敛,通过算法的优化,可以得到理想滤波结果。结合实践经验可知,常规的Kalman滤波,完成每次状态量预估,都要花费较多时间,参数Q、R、q、r在实际应用中,采用的是前一环节的数值,因此四个量存在滞后性,这就会让测距的准确度降低,产生较大的误差值,严重影响后验估计质量,甚至引起发散。为了改变现状,提高后验估计质量,将Kalman滤波法和Sage_ Husa法进行融合,可以根据加权系数进行高质量的参数更正,从而强化避障效果。
3 改进的Kalman滤波器设计
随着飞行器应用领域扩展,为了提高飞行器性能,完善其躲避障碍的功能,提高避障能力,需要基于改进的Kalman滤波算法,对滤波器进行优化,确保滤波器性能稳定,借此增强无人机避障能力。
以无人机测距这一场景为例,在传感器内部信息融合时,需要输入超声波或者是激光传感器测距信息,二者测量值为同一量纲,想要实现两类信息的融合,就要改变其中一个的量纲。在实际应用中,我们将状态值设定为x,并且将激光测距采样值的导数设为u,作为滤波器的输入量,将超声波测距采样值设为z,可得状态空间方程以及应用价值较高的测量方程:为采样频率。除此之外, wu与 wh分别代表激光和超声波传感器的测量噪声。
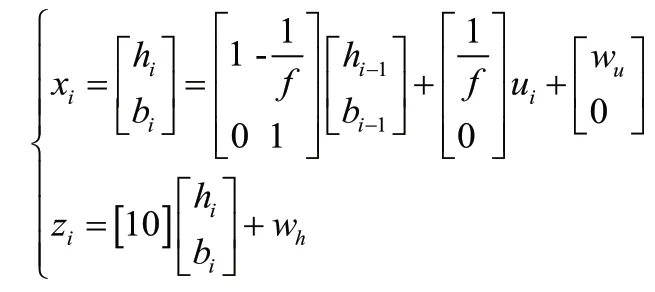
式中: ui为激光测距导数值速度;hi为超声波测距值;f
为便于该方程式的实现,现取 x = [h,b]T,h代表距离量,b为常数,也就是在实际测量过程中,激光测距产生的测量偏差。实际应用中由于天气或者周围反射特性的不同,激光测距和超声波测距的误差会随之改变。通过调节遗忘因子即可巧妙地改变两种滤波器在融合后的测量噪声R中的比例,激光测距误差小时,b较小,使得测量噪声R主要反应激光测距的噪声;反之超声波测距效果好时,b一般偏大,这样就可以通过融合激光和超声波测距两种方式来提高测量噪声R的准确性,从而降低Kalman滤波发散的可能性,提升测距精度。
从无人机融合超声波和激光测距来提升测距精度优化滤波输出,我们可以得到启发,在测量同一物理量时,都可以考虑应用这一方法将多个测量手段综合起来以提高整体测量的精度,在实际应用中可以通过实验得到不同场景下合适的遗忘因子取值,这样在遇到特定场景时即可灵活切换,自适应改变Kalman参数,优化滤波器性能。
在Kalman滤波器设计中,需要对原Kalman滤波器进行功能上的完善与性能上的优化,由于原Kalman滤波器使用受到限制,经常状态估计不准,甚至在实际应用中,会出现发散现象。为了避免此类问题,需要持续优化原有的Kalman滤波器,在原有性能结构基础上进行改良,实际操作中,借助简化的Sage_ Husa法,完成对原滤波器的性能修正[3]。实践证明,改进的Sage_ Husa滤波器性能稳定,在原滤波器中引入了加权系数d(遗忘因子的),通过这样的改进,可以提升滤波器稳定性,使其随迭代变化,在测距方面更加精准,从而强化滤波器的应用效果,为避障系统功能发挥提供保障。
4 实例应用分析
随着无人机用途的增多,应用领域不断扩张,无人机可以辅助完成高难度的信息收集以及监测工作,运行效率较高。现实应用中,想要完善无人机的功能,就必须从避障系统优化入手,通过增强避障功能,确保无人机性能稳定。超声波测距避障系统在现实应用中,分为三个步骤:①借助模块测量距离(空间阵列超声波模块)对前方的障碍物精准判断。其原理是首先利用电调,将其作为最为关键的供电模块,在此前提下,使用芯片驱动超声波完成想要的距离探测,这是最为关键的步骤,不容忽视。模块上电前,需要确保模块处于理想的串口触发模式,只有这样,才能让输入信号立即发挥作用,发出超声波脉冲,基础搭建完成后,便可以进行回波信号检测。在整个过程中,会对温度值进行测量,结合实际温度需求进行校正,最终保证输出距离结果的精准。②飞控中的芯片作用显著,根据接收数据以及科学设定的距离,可以提出最佳决策方案。③最后一步是根据操作指令(现实中操作员发出的)以及相关报警信号,作出合理的综合决策。研究发现,在实际操作中,人员的操作指令不容忽视,往往会和报警信号一起,穿越组合的传输门,完成最后的决策,实际操作中,需要结合现实需求,针对不同安全距离,制定合理性较高的控制策略,在此基础上,发挥智能的综合避障作用。
通过上述分析了解到,无人机避障系统功能强大,涉及内容较多,想要实现避障系统的优化,必须进行精准的测量,对原有的算法进行完善,将Kalman滤波法和Sage_ Husa法进行融合,实践表明,该算法的融合意义非凡,可以根据加权系数完成优质的参数更正,从而增强避障系统功能,强化避障效果,消除无人机飞行的隐患。现实中的主要方法是:在算法中合理引进遗忘因子,在此基础上进行校正,将其和Kalman滤波算法融合,得出最佳的计算方案,完成对Kalman的简化,借助算法的改进,增强避障系统的适应性,为无人机应用效果改善助力,提高其操作水平。
5 结束语
综上所述,在现实应用中,无论是激光传感器还是较为常见的超声波传感器,当进行不同障碍物的测距时,都会出现一定测量误差,并且测距结果非常不稳定,为了改善这方面的问题,可以将先进的Sage_Husa自适应法与目前使用的Kalman滤波器进行融合,完成相关参数的优化。现实表明,两者的数据融合具有一定前瞻性,可以有效改善传统数据采集不稳定的问题,提高数据采集精度,保持稳定测量结果,在此基础上降低测量误差,为无人机性能提升奠定基础。
