基于线性矩阵不等式的巡检机器人路径规划
2021-08-13戴昊崔志文袁鹏欧旋
戴昊,崔志文,袁鹏,欧旋
(深圳供电局有限公司,广东 深圳 518000)
0 引言
巡检机器人是一种能够完成输电线路巡检、应急监测、环境监测和反恐处突等任务的机器人。图1是某公司的巡检机器人E100。E100面向电力、市政、通信和石化等行业,为智能运维系统提供环境和工业设备状态的监测数据。

图1 E100巡检机器人
巡检机器人在任务空间运动时,首先要解决的就是路径获取以及路径规划问题。路径规划依赖于机器人和目标点的位置信息,通过有效的算法,求得一条连接出发点和目标点的最优轨迹;同时需要满足诸多约束,如障碍物规避、路程和时间要求等。针对机器人的轨迹规划,国内外学者提出了大量方法[1-5]。主要的路径规划有四类,第一类是基于地图构建的路径规划方法,KUWATA Y等[6]将可视图法从二维扩展到三维,并应用到无人机的航迹规划中,但该方法没有充分考虑路径中的约束;肖秦琨等[7]对轨迹规划中的Voronoi图法进行了改进,提高了机器人运行的安全度,但不是最优解;HRABAR S E[8]使用概率图法,在搜索空间内按照概率分布产生随机路径点,连接路径点构成完整的路径,并在三维空间内的轨迹规划进行了仿真研究,但该路径不一定是最优的。第二类是在基于虚拟势场法轨迹规划方面,侯翔[9]在人工势场的基础上,通过引入指数因子构造斥力函数来平衡障碍物斥力,解决了障碍物附件目标不可达问题,但容易陷入局部最小点;贝前程等[10]对传统人工势场进行了改进,提出改进的斥力函数方法,确保机器人能够顺利到达目标点;LIU C A等[11]将流体力学理论应用到机器人路径规划中,建立流场,可以获得光滑的路径,但对规划中的约束考虑不足。第三类是一些学者将数学最优化的方法应用到轨迹规划中,DOGAN A[12]在障碍物威胁概率密度函数的基础上,提出了使用迭代步方法进行路径规划,并推广到三维规划中,规划得到的路径安全性较高,但未必是最优解;张剑等[13]用支持向量机对电力巡线无人机工作区域进行非线性分割,并从分割平面中选择适当的路径,避障性能较好。第四类是基于生物智能的方法,这种方法具有较强的搜索能力,适合搜索最优轨迹,袁佳泉等[14]在蚁群算法的基础上,结合模拟退火算法来进行机器人的轨迹规划,提高了计算速度;张丹红等[15]将A*算法与蚁群算法相结合,应用到巡逻艇的路径规划中,求解全局最短巡逻路径。这些方法在路径光滑性、环境适应性和实时性上都各有优势与局限。
本文针对巡检机器人的任务特点,在主要的轨迹规划方法的基础上,提出一种结合单元分解和线性代数的航迹规划方法。首先,描述基于Delaunay剖分法的任务环境三角划分;然后,在此基础上,对轨迹规划进行数学描述,定义变量以及约束条件,将规划问题转化为基于线性矩阵不等式的最优化问题;最后,结合实际的任务环境,对环境进行简化,并利用简化后的模型进行仿真计算以验证本文方法的正确性。
1 任务环境三角划分
定义二维三角剖分:二维实数域上的点集V,以此点集中的点作为端点,构成封闭线段e,E为线段e的集合。该点集V的一个三角剖分T=(V,E)构成一个平面图G。该平面满足条件:
1)平面图中的边不包含点集中除了端点外的任何点;
2)没有相交的边;
3)平面图中所有的面都是三角面,且所有三角面的集合是散点集V的凸包。
三角剖分在图形学和建模中被广泛使用,用来模拟复杂物体的表面。在三角剖分的基础上,满足空圆特性和最大化最小角特性的剖分称为Delaunay剖分。即Delaunay三角形网中,任一三角形的外接圆范围不会存在其他点且三角形的最小角最大。Delaunay三角剖分与Voronoi划分互为对偶图,如图2所示。

图2 点集的Delaunay三角剖分(实线)和Voronoi图(虚线)
进行Delaunay剖分前,需要确定任务空间中障碍物的边以及顶点和内角点的坐标值。三角剖分后,对障碍物内部的三角形区域进行标记并且从三角组网中剔除。剩下的三角形称为自由三角形,组成自由空间。二维下的任务空间Delaunay三角剖分如图3所示。

图3 任务空间的Delaunay剖分
Delaunay三角剖分具有唯一性、最优性和规则性等优点,所以在对E100的任务空间进行建模中使用该方法,使得算法更加可靠。
2 加权函数和优化准则
在线性矩阵不等式约束的优化问题中,目标函数决定了哪一条路径会被选中,所以,选择可靠的目标函数至关重要。目标函数由两个矩阵组成,权重矩阵和变量矩阵(将在第3部分中讨论)。定义如下优化准则:
1)三角形的数量(WN):在不考虑尺寸的情况下,从起点到终点的路径尽可能地选择三角形数量较少的一条;
2)三角形的面积(WA):算法搜索的路径尽可能地保证路径中三角形组成的面积要小;
3)三角形的中线长(WM):选取三角形的中线作为三角形中机器人的要走的路径,并尽可能地保证中线长的和要短;
4)机器人尺寸约束(WR):机器人穿过障碍物时,机器人的尺寸大于障碍物之间的距离时,障碍物之间的路径不能被选择。
将上述的准则进行加权组合,构成加权目标函数
W=α1×WN+α2×WA+α3×WM+α4×WR
(1)
用加权目标函数对路径进行评价,以规划出最优路径。
准则3)中机器人通过三角形时,选择三角形的连接两条自由边的中线作为路径。自由边位于Cfree自由区域中,不属于任何障碍物的边缘。这些中线代表各个三角形,中线长度的和作为目标方程中的一个权重。其中,对于起始点S和终点G,其连接相邻三角形边的中点所构成的路线SE和FG来取代中线,构成起始路径和终止路径。如图4所示。

图4 通道中的路径
3 建立优化模型
定义具有如下形式的不等式为线性矩阵不等式
(2)

线性矩阵不等式的约束条件定义了自变量空间的一个凸集,即{X|F(X)<0},所以,这是一个凸约束。线性矩阵不等式的这一性质使得其是求解线性凸二次规划问题的有效方法。很多系统的最优化问题都可以转换为基于线性矩阵不等式的凸或准凸优化,并且能够解决很多没有解析解的问题。线性矩阵不等式约束下的最优问题为:
minx∈Sf(x),f:S→R
s.t.F(x)<0
(3)
使用MATLAB内自带的线性矩阵不等式(LMIs)求解器进行仿真运算。
使用二进制整数规划法来描述Cfree中的三角形,即代表路径规划问题的目标函数的变量。所以,变量的二进制整数规划(BIP)定义如下:
(4)
为了保证从起点到目标点的路径连续,构建轨迹通道的三角形必须满足如下条件:
3.2.2 医患关系紧张 在访谈中,大部分医护工作者都提到了影响自身职业认同水平的主要因素是紧张的医患关系。“我们在医院工作的人压力都非常大,这种压力并不是说医学素养不够、诊治技能差,我们对自己非常有信心,压力主要来自和病人之间的关系。”当前医患关系紧张,甚至发生了多起袭医事件,这导致部分医护工作者对自身职业认同程度降低。“有一些病患误解了医护工作这个职业,觉得我们什么病症都可以治好,这是不现实的想法”“我觉得在医院工作,不论医生还是护士,都是非常高尚的职业,我们也尽职尽责地帮助病患解除痛苦,但病患来医院本来就带着消极情绪,有时候不太理解我们的工作性质。”
1)起始点和终点的三角形必须被选中,分别为xS和xG;
2)如果一个三角形被选中(除了xS和xG),则它相邻的两个三角形也必须被选中(连续性条件);
3)起始和目标三角形只能有一个被选中的相邻三角形(避免环回条件);
4)为了避免环回,有三个自由边的两个相邻三角形一定都被选中。
基于以上条件,求解最优轨迹的BIP模型描述为:
MinimizeJ=WT·X
s.t.
xS=1,xG=1,xi∈{0,1},i∉{S,G}。
(5)

根据上述约束,所以轨迹规划问题转换为拥有k+p个约束的最优规划问题(k+p-2个不等式和2个等式),最优规划问题的优化准则由方程J定义。
上述的最小化问题模型可以转化为基于线性矩阵不等式约束的优化问题。目标方程为:
MinimizeJ=WT·X
(6)
式中Tk×1是变量[xi]的列向量;Wk×1是加权列向量。
对于约束方程,式(5)中的不等式和等式重新构造成拥有如下3个线性矩阵不等式的系统:
H=diag(AX-CX)≥0
U=diag(A′X-C′X)=0
V=diag(A″X-C″)≤0
(7)

上述的线性矩阵不等式经过解算后数值为1的变量代表最优路径中的三角形,最优路径从属于Cfree空间中。直接使用二进制整数规划进行求解得到的答案与使用线性矩阵不等式所得到的答案一样,但使用线性矩阵不等式求解更简单,速度也更快。
4 仿真实验
构建巡检机器人的工作环境,进行仿真,仿真结果如图5所示。

图5 最优路径
由图5可以看出最优通道中三角形的中线构成机器人运动轨迹。图中椭圆形标注出的通道虽然可以获得更加短的路径,但由于机器人尺寸限制,该条通道不可选。
这里对规划出的最优路径进行一个优化。利用通道中的三角形构造凸多边形。从起始三角形开始,增加相邻三角形,直到组成的多边形变凹。下一个凸多边形从这个断开的三角形开始,依次进行三角形的组合,将通道中的凸多边形的边的中点的连线作为运动轨迹,如图6所示。
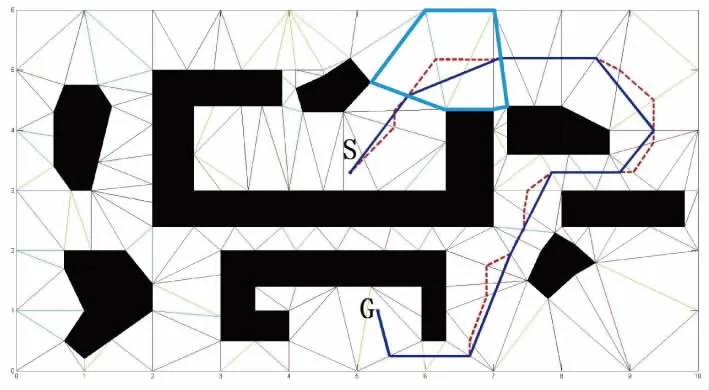
图6 优化后的最优路径
图6中圈出的区域为多个三角形构成的凸多边形,调整后的轨迹比原先中线构成的轨迹更短,而且凸多边形也保证了两条边中点的连线在最优通道中,不会穿过障碍物。
最后对轨迹进行光滑处理,以使得机器人在运行中的转向较为平缓,得到优化后的路径曲线如图7所示。

图7 光滑处理后的最优路径
在仿真实验的基础上,为了验证本文方法高效性,构造多个工作环境,将本文方法的路径规划耗时和路径长度与其他相近方法进行对比。这里选取与Delaunay三角剖分互为偶图的Voronoi划分,对任务空间进行划分,并使用高效的Dijkstra算法对划分后的任务空间进行最优路径的搜索。任务环境之间以环境中障碍物的数量n为变量,从5~30递增,每次规划都进行多次计算仿真,取平均值。两种方法对比仿真计算的结果如表1所示。
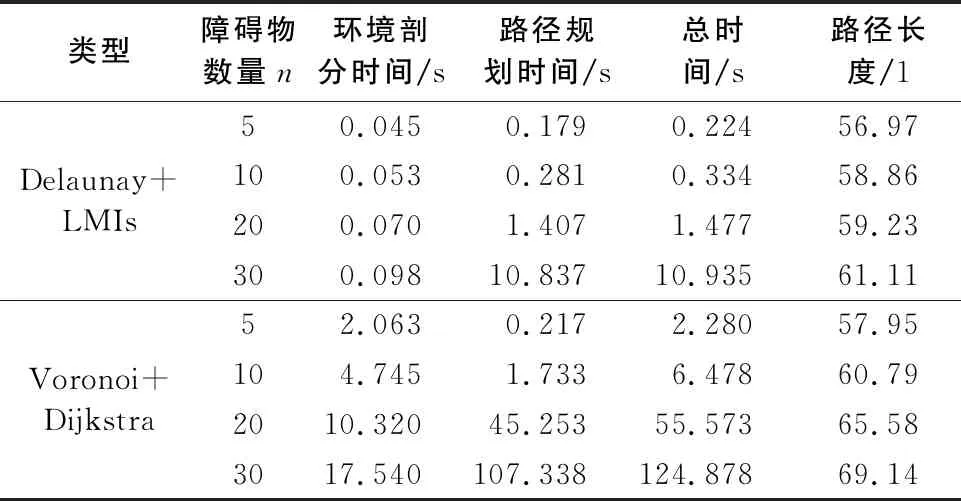
表1 规划耗时和路径长度
从表1中可以看出,本文的算法在路径长度较短的情况下,规划耗时也较短,尤其是障碍物数量较多时,规划上的效率优势更为突出。
5 结语
本文提出了一种基于线性矩阵不等式的巡检机器人路径规划方法,并以E100巡检机器人为例,构建任务环境,进行仿真,验证了算法的正确性,同时与相近算法进行对比,验证了高效性。本文的算法简单、完备,考虑了路径中的约束,且机器人不会陷入局部最小点。
