一种轨道式巡检机器人系统技术开发与应用
2021-08-13林雅峰
林雅峰
(福建(泉州)哈工大工程技术研究院,福建 泉州 362000)
0 引言
某重要大型露天仓库,地处偏僻,库区占地面积广,库区内存放的物质属于重要军用物资,要求具备较高的安防等级。传统的安防系统是:1)安排大量的巡检人员不论白天、夜晚还是刮风下雨,进行巡逻,其劳动强度大;2)在固定点安装高清摄像头进行覆盖监控[1]。这些方式都无法全方位监控,特别是一些监控死角,盗窃分子经常选择该处进行偷盗;而且这些安防措施都有一定的局限性,尤其在夜晚时段,两种方式不能够对仓库进行持续有效的监控和及时应对。本项目所研制的巡检机器人能够对仓库内情况进行实时的监测和预警,可以很好地弥补现有监控系统位置固定、数量繁多、缺少执行机构等问题。该系统能够有效地减小巡检人员的巡防压力,大幅度减少工作人员数量,强化对仓库物质的监控,加快对盗窃等紧急事件的响应速度。
1 轨道式巡检机器人系统设计
巡检机器人主要由高速运行设备自定位系统、全方位动态目标检测系统、人体视觉检测跟随系统、分级报警及应对系统、智能调度系统、自动失能打击系统等组成,如图1所示。设备轨道安装于一定高度的城墙上,可代替安防人员按照一定的策略对仓库周围进行自主巡检,对区域内进行24 h连续监控。
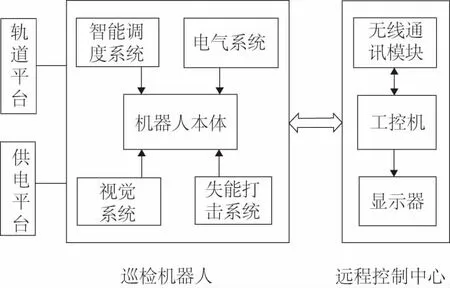
图1 巡检机器人系统组成
1.1 巡检机器人本体系统
机器人整体结构紧凑,质量适中(采用高强度铝合金材质)。本体部分主要由驱动模块、前后随动回转模块、电控模块、失能打击模块、外罩、本体摄像头等组成。通过在仓库区域内的高墙上安装封闭的I字形轨道回路作为移动机器人主机的运行轨道,轨道上可以同时安装多台移动机器人主机进行作业,并通过滑触线向移动机器人进行实时供电。机器人本体通过侧向和纵向限位轮组进行导向,驱动轮在拉紧弹簧作用下压紧轨道下平面,进行直线或曲线运动。整体设计结构[2]如图2所示,运行原理如图3所示。

图2 巡检机器人机械结构

图3 机器人运行原理图
1.2 人体视觉检测系统
视觉检测分为动态目标检测(人员初定位)和人员跟随定位两部分。第一部分通过外部传感器或者摄像头按照区域对动态目标进行检测、搜索;第二部分是通过本体搭载的相机将视频回传至服务器进行人体视觉实时检测,获得人员位置信息,从而引导机器人进行实时跟随。视觉检测如图4所示。

图4 视觉检测图像
动态目标检测用的方法是基于混合高斯模型的背景减除法[3-4]。混合高斯模型基本算法原理:混合高斯模型使用K(基本为3~5)个高斯模型来表征图像中各个像素点的特征,在新一帧图像获得后更新混合高斯模型,用当前图像中的每个像素点与混合高斯模型匹配;如果成功则判定该点为背景点,否则为前景点。这种方法的好处在于,同一个像素位置处可以呈现多个模态的像素值变化(例如水波纹、晃动的叶子等),因此可以降低自然因素引起的一些动态目标误判。具体过程如下:
1)从监控摄像头获取图像并利用混合高斯函数对背景进行初始化建模;
2)当监控区域出现动态目标时,目标所处的区域与背景混合高斯模型不匹配从而判定该区域为前景目标(即可疑目标);
3)对背景模型进行更新;
4)循环上述步骤即可实时获取动态目标位置信息,再将目标位置信息发送到上位机;
5)上位机调度机器人到可疑目标位置对目标进一步确认。
人体视觉实时检测系统主要是通过构建基于深度学习[5]神经网络系统的图像人体特征检测。图像检测流程包括:初始化背景,提取背景模型,并实时更新背景信息;通过运动目标检测获得场景数据,对场景数据进行特征提取并与人物特征数据进行匹配获得人物图像数据;提取人物质心坐标并发送至移动机器人控制器,通过调度系统控制合适的移动机器人本体对人员进行跟踪。
1.3 智能调度系统
调度系统功能是通过移动机器人主机之间的协作以提高系统的响应速度和防护性能,同时也对系统自身的安全性能起到很好的保护作用。具体实现流程为:通过人体视觉实时检测系统与高速定位系统将可疑人员和各移动机器人主机的具体位置信息、速度信息上报调度系统。调度系统[6]通过调度算法根据各移动机器人主机与可疑人员之间的相对位置关系,设定每台移动机器人主机的优先级别并调用最近的一台/两台移动机器人主机,对可疑人员进行跟踪围堵,同时向值班室发送警报信息,从而有效扰乱可疑人员的盗窃行为。控制方案如图5所示。
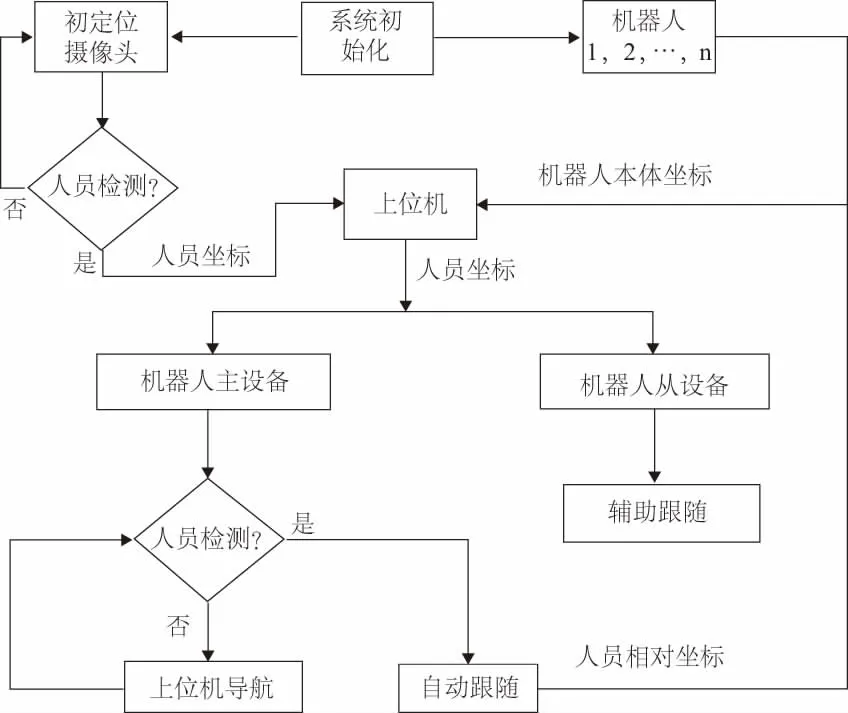
图5 调度控制方案
1.4 电气系统
机器人电气系统主要包含伺服电机、驱动器、本体相机、初定位相机、上位机、粉弹打击模块及外围声光等设备。实现的主要功能包含跟踪巡逻、声光报警以及失能打击。
a)跟踪巡逻
巡检机器人动力源为本体搭载的伺服电机,并搭载有绝对式编码器用以识别自身位置,其网络图如图6所示。上位机统一接收来自初定位相机与本体相机的检测数据,进行适当处理后,对机器人发送相应的运动指令,主要包含如下3种运动模式:

图6 巡检机器人网络结构
1)巡逻模式:当防御范围内无目标出现时,巡检机器人进入巡逻模式,本体将以设定速度在巡逻范围内做往复运动[7],以此来达到一定的震慑作用。
2)初定位模式:当初定位相机监测到动态目标后,上位机通过初定位相机发来的数据与机器人本体位置进行比对,根据比对结果,发送初定位信号;本体CPU根据接收到的信号,快速接近动态目标,使目标进入本体相机视野,对目标进行甄别。
3)跟踪模式:在任何模式下,当本体相机检测到目标后,上位机将本体相机检测到的目标位置发送给本体CPU,机器人将进入跟踪模式,本体CPU根据目标位置,通过PID[8-9]算法,使机器人紧跟目标。
b)声光报警
机器人进入跟踪模式后,其搭载的声光报警将被激活,警笛开始鸣响,同时对目标进行语音警告。
c)失能打击
机器人搭载粉弹打击模块[10-11]。当其进入跟踪模式后,若目标接近机器人所防御的围墙,并试图进行逃跑时,本体摄像头瞄准到位后,通过电磁铁激活粉弹激针,将搭载的具备失能性打击的粉末快速打出,而后通过棘轮机构自动转换枪膛弹位,为下次激发做好准备。
2 巡检机器人系统功能
该系统可实现的功能主要如下:
1)自动巡逻:机器人本体搭载有伺服电机作为主驱动,同时搭载有绝对式编码器进行位置识别。当本体没有检测到可疑目标时,机器人进入巡逻模式,以设定的速度在巡逻范围内做往复运动。
2)自动识别:机器人本体搭载有摄像头随时监控本体区域内的场景,通过图像摄取装置将摄取的目标转成图像信号,传送给图像处理系统,系统根据像素分布、颜色、亮度等信息,将其转变成数字化信号。图像系统对数字信号进行各种运算来抽取目标的特征,进而根据判别的结果来识别进入警戒区域的可疑人员。
3)自动跟踪:该功能的实现主要依靠系统搭载的初定位摄像头与机器人本体摄像头, 可疑人员进入警戒线后,机器人将识别情况与人员位置,跟随人员移动。
4)自动报警:当本体进入跟踪模式后,机器人搭载的警笛与声光系统被激活,同时对可疑人员进行语音警告,并将其可疑行为回传至控制中心,通知工作人员采取预警措施。
5)自动打击:如发现人员入侵或盗窃出逃后,可通过喷射干粉等进行先期处置,为执勤人员到位处置争取宝贵时间。
3 巡检机器人实际应用
目前,机器人已在某个露天仓库系统试点应用,通过对各模块进行试验研究得到相关参数,所有指标符合预期要求。
主要试验过程如下:
1)移动速度V以及加速度a测量方法:机器人本体安装有绝对式编码器,通过米轮转过的圈数,经计算可准确知道其位置。由试验图7可知,设备的最大移动速度是V=7.178m/s,速度由0加速到最大速度的时间Δt=2.333s,可知a=ΔV/Δt=7.178/2.333=3.08m/s2。

图7 移动速度以及加速度测量
2)跟踪定位误差以及自定位误差测量方法:①测试人员以某一速度运动,让机器人跟随运动,最后人员突然停止运动定位于某一位置,机器人最终也停止跟随。测量人员与设备的间隔差,跟踪定位误差为0.275m,如图8所示。②让设备通过预定程序行驶一段距离后停止运动,测量实际位置与理论位置的偏差,试验得出自定位误差为0.1m。
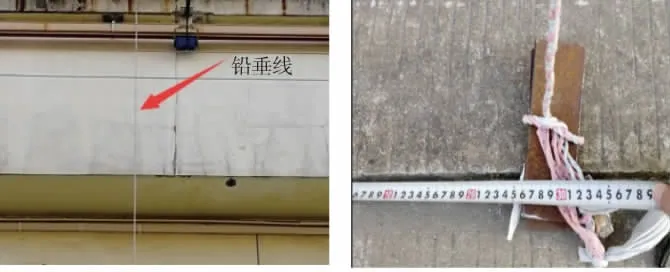
图8 跟踪定位误差测量
3)将轨道加工弯曲成R400,机器人可实现左右拐弯,如图9所示。
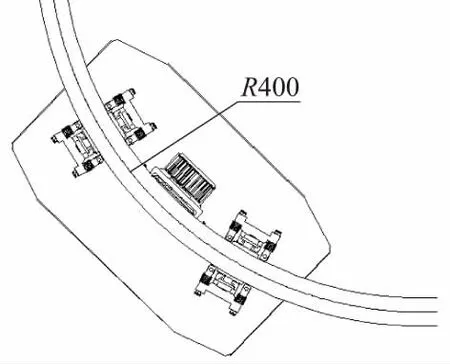
图9 拐弯半径分析图
4)相机视场宽(轨道安装高度6.5m)为14m,图像平均传输、处理帧率为21fps。
5)正常运行时,噪声测量的平均值为57db,噪声等级符合3类环境噪声标准,测量过程如图10所示。

图10 噪声测量过程
6)多次淋雨试验,设备仍可正常运行,防护等级≥IP65。
4 巡检机器人系统关键技术
巡检机器人系统主要包括以下5个关键技术。
1)轨道式移动机器人系统虚拟样机技术
结合实际的场景和工况设计合理的安装位置及机器人运动执行机构,通过虚拟样机对其结构合理性和机构有效性进行充分验证,使机器人本体在轨道上可靠定位,同时具备良好的紧凑性、机动性和平稳性。
2)基于深度学习算法的人体视觉实时检测技术
结合场所的地形和现场环境,编写背景提取和人员检测算法,对现场视频进行实时分析,在检测到人员的同时提取其具体位置及运动信息,再通过调度系统控制移动机器人本体按照预期的规律运动。
3)高速非线性运动控制及定位技术
通过视觉检测技术对现场可疑人员的位置坐标进行提取,同时通过本体搭载的绝对式编码器检测实时位置,两者结合确定可疑人员与移动机器人的相对位置后进行闭环跟随控制。
4)应急响应人机交互技术
充分调研现场环境及各种状况下预案流程,根据执勤任务及各种突发状况制定相应的系统交互信息及交互界面,实现日常巡逻的正常开展,突发状况下的自动报警、画面回传、自动跟随、中控室远程控制等功能。
5)失能打击技术
设计符合情景的失能打击系统,通过视觉检测对现场情况做出判断并根据应急打击许可条件对可疑人员进行单次/连续非致命性打击,使其暂时丧失逃脱能力。
5 结语
本文提供了一种轨道式巡检机器人系统,该系统可代替人工自动巡逻、自动识别、自动跟踪、自动报警、自动打击等,可减小执勤人员的劳动强度,加强对露天仓库物质的管控,应对盗窃行为等突发情况,提高仓库安防系统的智能水平。整套系统已在试点应用,各功能均达到预期目标,可为后续的开发应用提供实践经验及优化方向。
