飞机舱门开关机构数字化模型构建技术研究
2021-08-13吴扬张乐裘旭冬周石恩陆玥朱骏
吴扬,张乐,裘旭冬,周石恩, 陆玥, 朱骏
(1. 上海飞机设计研究院,上海 201210; 2. 上海无线电设备研究所,上海 201109)
0 引言
飞机舱门机构系统是飞机的主要机构系统之一(图1),其能否完成预期的功能将直接关系到飞机的飞行安全性[1]。作为舱门系统的主要测试门类之一,舱门开关机构联动姿态测试是一项流程复杂、工作量大的工程。通过仿真模拟与物理测试相结合的方式,并且未来逐步以虚拟试验为主,物理试验为辅,是提高测试效率的有效途径[2]。在投产和正式试验启动前对试验过程进行预演和分析,能够提高试验设计的准确性,对于减少试验成本、缩短试验件结构优化周期具有重要意义[3]。

图1 飞机舱门示意图
传统机构运动仿真方法大都是以特定运动副来约束组成零件,一般只适用于较为简单的机构,而对于飞机舱门开关机构这种零件层级多、串并联混合的复杂系统则难以模拟[4-5]。本文通过构建简单机构的数学模型及机构间的串并联关系,以驱动件运动参数为自变量,逐层求解各个被动件运动表达式,可视化显示任意时刻的舱门状态。
1 系统介绍
1.1 飞机舱门开关机构
飞机舱门开关机构由凸轮手柄传动机构、铰链臂机构、锁钩开闭机构等众多子机构组合而成[6-7],如图2所示。本文研究对象舱门为外开式,整个开门过程包括舱门抬升和舱门平移两个步骤[8]。打开后的舱门与机身平行,其机构状态如图3所示。

图2 舱门开关机构主要组成部分

图3 舱门开启后状态
1.2 Visual Components软件系统
所采用的软件系统为Visual Components软件,简称VC。VC是全方位的数字化工厂仿真软件,集离散物流仿真模拟、机器人离线编程以及PLC虚拟调试三大功能于一体。VC支持绝大多数的CAD格式文件导入,包含丰富的组件库,具有独创的PnP即插即用功能,可实现机构组件的属性、行为定义和运动仿真。
2 飞机舱门模型前处理
2.1 舱门CAD模型导入
飞机舱门一般是在Catia等专业建模软件中创建,然后导入到VC软件中。为防止结构树错乱以及格式转换问题,将Catia模型分为多个cgr格式部件结构,再导入VC软件中。以舱门把手为例,在VC软件界面中选择导入“几何元”选项,如图4所示。在VC软件的“建模”模块,可以看到把手部件的结构树下包括多个子实体。由于后续整个把手保持相同的运动,需使用“组合”功能将把手对应实体部分合并为一个实体,如图5所示。

图4 CAD零件导入VC界面

图5 部件结构几何实体合并
2.2 机构关节提取及层级确定
选择把手合并后的实体并利用“提取链接”功能生成结构关节,它包含部件坐标、部件名称、部件偏移量以及关节属性等属性,如图6所示。将把手作为主动驱动件,运动方式为旋转,将把手零件坐标系调整至y轴与旋转轴重合,此时旋转方向为+y轴,新建伺服控制器Servo Controller来进行驱动,关节名称为J1。

图6 把手关节提取与属性编辑
舱门开关机构是由众多子机构通过串并联方式组合完成舱门的开启和关闭。图7为舱门铰链臂子机构层级图。通过对多层级的机构串并联关系的分析,确定从动件运动的相对关系,才能够理清舱门开关机构工作机理,又有利于更高层级从动件运动表达式的求解。

图7 舱门开关机构整体层级表示
3 机构关节运动表达式求解
3.1 凸轮曲柄机构
图8是由把手、内凸轮部件、摇臂以及其他固定件组成的凸轮曲柄机构。内凸轮部件与手柄具有相同的运动状态。第一阶段由于内凸轮前半部分圆弧与把手旋转轴线一致,此时摇臂末端销柱(与摇臂运动形式一致)保持不动;第二阶段则驱使销柱沿内凸轮后半直线部分运动,表现为摇臂绕其轴线的旋转运动。以下求解第二阶段求解摇臂的运动表达式。

图8 凸轮曲柄机构
将凸轮曲柄机构内凸轮和摇臂投影到二维平面,如图9所示,其中O1和O2分别为摇臂和内凸轮的旋转中心,以O2为圆心,O2O1为y轴建立坐标系。第二阶段初始状态时,C点和A点分别为内凸轮直线部分的起点和终点;当把手旋转一定角度J1(∠AO2B)时,C点和A点分别运动到E点和B点,此时销柱由C点运动到D点,∠CO1D(记为θ)即为摇臂的旋转角度。定义各个尺寸和间距如下:O1O2=h,O2C=O2E=R1,O2A=O2B=R2,O1C=O1D=R3,AC=BE=L,∠AO2C=∠BO2E=α,∠CO2O1=β。

图9 凸轮曲柄机构二维投影分析图
通过图9可以看出,θ的大小取决于线段CD的长度x,可以根据余弦定理求解,如式(1)所示。在VC软件中,定义了三角函数sssad用来快速求解三角形参数,则式(1)可以转化为式(2)的形式。点C和点A的坐标位置可通过测量固定长度项后计算获得,如式(3)所示。
(1)
θ=sssad(x,R3,R3)
(2)
(3)
式(3)中的角度α和β为定值,可用尺寸参数计算获得,如式(4)所示。
(4)
根据旋转变换方法,销柱从初始位置(xD,yD)随摇臂转动角度θ后,到达新的位置(x′D,y′D),二者存在式(5)所示关系,其中(x0,y0)为旋转中心坐标。
(5)
销柱初始位置在AC连接的直线上,销钉与摇臂旋转中心的距离保持不变,即:
(6)
(7)
联立方程式(5)、式(6)、式(7)即可求得第二阶段摇臂旋转角度θ随把手转角J1的数学表达式,而第一阶段它的值为0,因此其运动方式为分段函数,曲线如图10所示。

图10 摇臂随把手转动曲线图
3.2 四连杆机构
图11是由摇臂AB、连杆BC和套筒CD组成的四连杆机构,在ABCD平面内,摇臂的转动中心A和套筒的转动中心D相对位置保持不变,初始状态时四连杆长度a、b、c、d以及各边之间的夹角都可以通过测量得到,t=0时刻摇臂AB与AD的夹角大小记为A0。当摇臂AB驱动一定角度A(与3.1节的角度θ一致)时,问题转化为求解连杆BC和套筒CD的对应运动表达式。由于连杆BC绕B点运动角度参考对象为摇臂AB,因此连杆BC与摇臂AB间层级关系为串联;套筒CD绕D点运动角度参考对象为大地,因此套筒CD与摇臂AB间层级关系为并联。
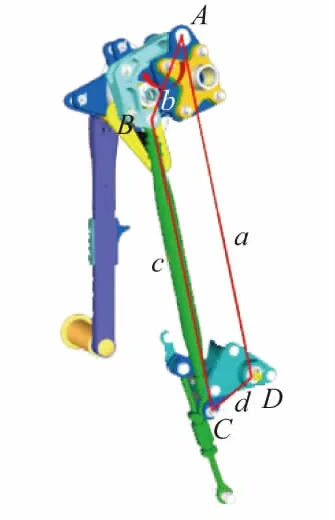
图11 舱门提升四连杆机构
四连杆机构的运动求解主要是通过余弦定理,假设BD的长度为e,在运动过程中e的大小会随着摇臂摆动角度而变化。当摇臂转动角度A时(此时摇臂AB与AD的实际夹角为A+A0),二者存在关系:
e=a2+b2-2·a·b·cos(A+A0)
(8)
连杆BC转动角度B由∠DBA和∠DBC相加得到,因此可以求得其表达式,如式(9)所示。同理,套筒CD的转动角度D表达式如式(10)所示。
(9)
(10)
在VC软件中,定义了特定的函数sasssa1用来快速求解四连杆机构参数,连杆BC转动角度B和套筒CD的转动角度D可以表示为式(11)。
(11)
式中degree和radian分别是VC软件中弧度转角度和角度转弧度的函数。
对于存在“交叉”现象的特殊四连杆结构(图12),由于使用余弦定理得到的表达式与式(8)和式(9)形式不一致,因此不能直接使用四连杆机构计算函数sasssa1,可通过两个三角函数sssad组合求解。
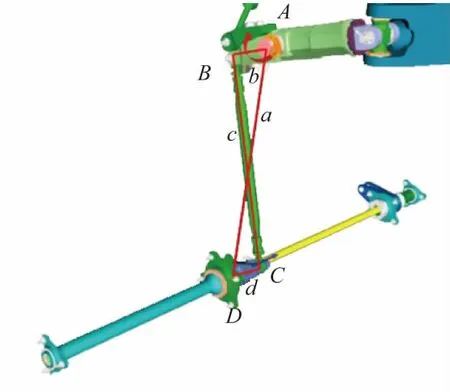
图12 “交叉”四连杆机构
在“交叉”四连杆机构中,BD长度e与式(7)完全一致,连杆BC转动角度B由∠DBA和∠DBC相减得到,同理,套筒CD的转动角度D由∠BDC和∠BDA相减得到,将其用VC软件自带的sssad表示,如式(12)所示。
(12)
4 结语
本文利用简单机构的复合构建了舱门开关机构的数字化模型,以表达式形式准确表示任意时刻机构组成零部件的所在位置,实现舱门开关过程的可视化。结果表明:舱门提升臂、摇臂等关键结构件随把手转动的角度与实际一致;且舱门提升高度以及平移幅度也与测量结果相同;证明了本文方法能够准确模拟飞机舱门开关情况。
