计算机视觉反馈辅助的导航定位系统研究
2021-08-10朱清坤
朱清坤


摘 要:在无人机(uav)等现代飞行器导航定位中,通常使用捷联惯导系统(SINS)、GPS定位系统相结合的导航方式,对大型飞行器飞行轨迹、自主着陆地点实施导航。其中捷联惯导平台由机载计算机、陀螺仪和加速度计等部分组成,陀螺仪、线性加速度计组合GPS定位系统,负责测量无人机飞行角度、线性轨迹等信息,之后将测得的运动姿态、飞行速度或目标位置的数据,传输至微型计算机平台,并利用离散卡尔曼滤波算法,展开飞行目标导航定位的误差仿真分析,来输出最终的惯导系统定位结果。
关键词:计算机视觉 SINS导航 卡尔曼滤波 导航定位
中图分类号:TP391.41 文献标识码:A 文章编号:1674-098X(2021)04(c)-0135-03
Research on Computer Vision Feedback Aided Navigation and Positioning System
ZHU Qingkun
(Zhengzhou Preschool Education College, Zhengzhou, Henan Province, 450000 China)
Abstract: In the navigation and positioning of modern aircraft such as unmanned aerial vehicle (UAV), the combination of strapdown inertial navigation system (SINS) and GPS positioning system is usually used to navigate the flight path and autonomous landing site of large aircraft. The strapdown inertial navigation platform is composed of airborne computer, gyroscope and accelerometer. The GPS positioning system of gyroscope and linear accelerometer is responsible for measuring the flight angle, linear trajectory and other information of UAV. Then, the measured data of motion attitude, flight speed or target position are transmitted to the microcomputer platform, and the discrete Kalman filter algorithm is used, The error simulation analysis of flight target navigation and positioning is carried out to output the final positioning result of INS.
Key Words: Computer vision; SINS navigation; Kalman filter; Navigation and positioning
当前对于大型飞行器的视觉导航定位,主要利用三维图像模型、GPS/SINS组合定位相结合方法,进行目标对象准三维立体模型的构建。本文借助于离散卡尔曼滤波算法,将计算机视觉系统获得的图像信息,包含SINS导航的运动位置、飞行角度和轨迹信息,输入到摄像机模型中展开卡尔曼滤波,输出惯导系统导航的误差数值,并对无人机目标定位仿真结果进行修正,提高其在飞行过程中的定位精度。
1 计算机视觉导航定位技术的主要内容概述
计算机视觉系统主要借助于捷联惯导系统(SINS)、GPS卫星定位,进行GPS卫星图像的获取。之后根据图像信息划分为不同的结构类别,对图像细节展开预处理、特征抽取,输出具有高信噪比的图像数据,来确定目标对象在三维空间结构中的位置、运动路径等。
首先,GPS目标定位是通过GPS卫星信号、接收机本地参考信号的结合,对目标物体在运动过程中的传播时延进行测算,来得出卫星监测到目标瞬时位置,与实际位置之间存在的距离。
其次,捷联式惯性导航系统(SINS),是通过陀螺仪、加速度计等精密测量工具,进行无人机飞行器速度、加速度、角速率,以及参考坐标、运动轨迹、航行方向的测量与计算。捷联惯导系统在目标对象线性加速度、相对空间位置的测算中,通常将以上敏感元器件安装到运动载体上,监测目标飞行器做无规律运动时,其在地球坐标系O(xe,ye,ze)、机体坐标系O(xb,yb,zb)、地理坐标系O(xg,yg,zg)、导航坐标系O(xn,yn,zn)中所处的位置。之后对惯性器件量測的目标瞬时位置数值,经过复杂坐标变换,解算为计算机能够识别的加速度、角速度、参考坐标等矩阵信息,提取出目标物体运动的航向角、姿态信息。之后采用离散卡尔曼滤波算法,对多种大型飞行器瞬时位置、运动轨迹、加速度、角速率等动力学数据,展开量测微分方程的离散卡尔曼滤波仿真分析,并得出GPS定位系统监测数据、惯性导航器件监测数据之间,存在的测量角度误差、定位误差。
2 计算机视觉反馈辅助系统开展目标导航定位的实现原理
2.1 计算机视觉系统对无人机飞行器的导航定位流程
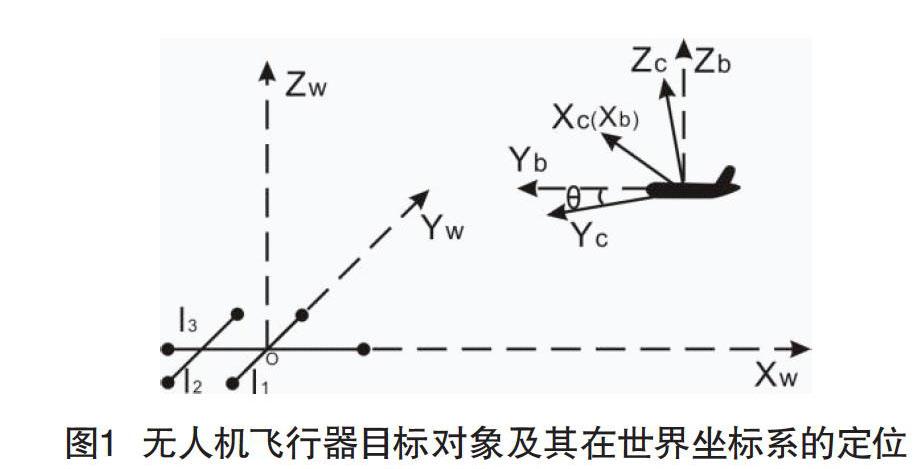
计算机视觉的目标导航定位系统,主要由GPS/SINS组合定位、摄像机图像定位两方面内容组成。摄像机成像定位通过摄像机的二维、三维图像信息,对无人机空间物体的三维位置坐标进行测算,一般会用到摄像机坐标系、像素坐标系、世界坐标系等。其中摄像机坐标系也被称为针孔摄像坐标系,摄像机光轴、无人机之间存在着一定夹角θ,在应用到距离摄像机较远目标对象的运动时,需要測算目标点在摄像机成像的投影位置,并将其顺时针旋转角度θ,得到目标对象与之对应的世界坐标系,具体如图1所示。因此运动目标摄像机坐标系(xc,yc,zc)、世界坐标系(xw,yw,zw)之间的转换,通常会采取正交旋转变化、坐标平移等方式来实现,转换关系式为:
(x0,y0,z0):摄像机光心O在世界坐标系的位置坐标;:无人机飞行器运动角度矩阵信息。
在无人机飞行器由自主航行到着陆的整个流程,以无人机跑道轴线l3作为世界坐标系Xw轴,标志线l1为世界坐标系Yw轴,沿l1、l3交点的垂线为Zw轴。当无人机目标对象进入到摄像机视野后,就开始对运动物体在摄像平面投影点进行位置求解,求出目标的摄像机坐标系(xc,yc,zc),具体如图1所示。之后根据陀螺仪、加速度计等测量工具,监测到的无人机水平夹角θ、位置高度等,求得在世界坐标系(xw,yw,zw)中目标特征点的定位信息。
2.2 离散卡尔曼滤波算法在目标对象导航定位中的应用方程
离散卡尔曼滤波算法属于卡尔曼滤波的种类之一,其可以被应用到GPS/SINS组合导航定位数据的仿真计算中。在无人机由飞行状态到自主着陆的过程中,GPS目标定位系统、捷联惯导系统等,会输出导航坐标系O(xn,yn,zn)中目标对象的定位参数信息,之后将其代入到计算机视觉定位系统,解算出针对世界坐标系(xw,yw,zw)的目标物体位置点,这一位置信息即为飞行器目标的真实位置预测值。GPS/SINS组合导航系统对无人机飞行器的定位数值求解如图2所示。
之后利用测得的图像识别数据、导航参数值,借助离散卡尔曼滤波算法,进行某一时间段内,目标对象动力学方程、自适应噪声方差矩阵的求解,以及目标物体非线性滤波方程的加权求和,得到目标物体运动中的运动轨迹、瞬时位置测量值。通过对目标前一状态、后一状态自适应噪声量测,完成飞行状态量值、滤波误差矩阵数据的分析,并修复无人机自主着陆过程中导航参数的测量误差。假设m时刻计算机视觉系统的目标状态值为Xm,在受到系统白噪声干扰情况下,目标对象瞬时位置的非线性随机函数方程为:
(Φm,m-1:m到m-1时刻内离散后的状态转移矩阵;Γm-1:系统噪声驱动阵;Wm-1:状态的噪声向量)。
3 计算机视觉反馈辅助系统中无人机目标导航定位的仿真分析
3.1 计算机视觉系统中无人机导航定位的仿真环境
无人机航行器在着陆飞行过程中,其上存在着陀螺仪、加速度计等惯导系统设备,以及周围区域环境成像的摄像机设备,摄像机与水平方向呈现一定夹角θ=-15°,机体参考坐标系为O(xb,yb,zb)、摄像机坐标系为O(xm,ym,zm)。利用GPS导航定位、惯性导航系统定位(SINS),开展无人机导航定位时,通常运用离散卡尔曼滤波法算法,对得到的输出目标定位信息进行校正。
3.2 计算机视觉系统中GPS/SINS组合导航定位的仿真实验与结果
假设无人机航行器的飞行高度H0=100m、飞行速度为V0=40m/s,飞行过程中无人机下滑角度为5°。摄像机监测到飞行器当前航行方向位置,所对应的地面投影点为O点,航行器沿着PP'轨迹路线飞行。两个地面摄像机之间的方向距离为d=100m,测得无人机飞行器导航位置矩阵为、无人机运动角度矩阵为、机体坐标系到测量坐标系的变换矩阵为。那么m时刻飞行器的摄像坐标系矢量为、,具体公式表示为:
运用陀螺仪、加速度计测得的飞行目标对象旋转度数、加速度,会产生30°/h、50mg左右的数值漂移。本文通过对陀螺仪、加速度计、GPS目标定位系统,监测到的飞行器位置点、速度、姿态角,进行离散卡尔曼滤波算法分析,得到位置白噪声均方差、速度误差、姿态角白噪声均方差。然后根据陀螺仪漂移、加速度计漂移程度,计算无人机飞行过程中监测的导航位置信息,与无人机真实位置点存在的定位误差,具体如表1所示。
目标对象在m到m-1时间节点内,离散卡尔曼滤波的状态预测方程、状态估值方程,以及预测均方误差方程、估计均方误差方程分别为:
由表1数据可以得出,采取离散卡尔曼滤波算法,进行飞行器目标位置仿真分析,可以得到m到m-1时间节点内,地球坐标系中无人机飞行位置、速度、角度,所存在的误差值、白噪声均方差,且其仿真误差都控制在有效范围内,能够对SINS/GPS组合导航监测的目标位置、速度、姿态数据得到修正,提升计算机视觉系统导航定位的精度。
4 结语
在计算机视觉系统的目标对象定位过程中,需要使用SINS/GPS组合导航定位,进行无人机飞行器伪距、实测数据的定位分析,包括建立伪距多普勒频移公式、电波载频方程,精确检测信号白噪声、传播时延而导致的定位位置误差等。由于无人机飞行器运动位置,会随着时间变化而发生无规律变化。因此通过离散卡尔曼滤波算法,开展目标无人机加速度、角速率、运动轨迹,以及世界坐标系位置信息的预测与估算,可以得到飞行物体在某一时间段内的预测均方误差、估计均方误差,从而最大程度保障目标对象导航定位结果的准确性。
参考文献
[1] 茅正冲,陈强.基于机器视觉的AGV导航与定位算法研究[J].计算机与数字工程,2020,48(8):1914-1918.
[2] 赵博.基于视觉导航的自动导引车设计与实现[D].济南:山东大学,2017.
[3] Tongqing Feng,Bin Jiao. The vision guidance and image processing of AGV[J].Journal of Physics: Conference Series,2020(1).
[4] 罗高,袁亮.基于二维码的单目视觉测距移动机器人定位研究[J].组合机床与自动化加工技术,2017(10):114-117,121.
[5] 肖大伟,翟军勇.轮式移动机器人单目视觉的目标测距方法[J].计算机工程,2017,43(4):287-291.
[6] 张英.GPS拒止条件下无人机自主全局定位技术[D].西安:西安电子科技大学,2019.
